基于OpenMV的采摘机器人定位抓取关键技术研究
2019-10-21金彦继金小暄谢继文赵德金
金彦继 金小暄 谢继文 赵德金
摘 要:图像识别在当今扮演着越来越重要的角色,过去由于硬件等各种方面的限制,图像识别大多停留在理论环节。随着科技的进步,各种高性能控制芯片的诞生为图像识别的研究起到了强烈的催化作用,许多方面逐渐应用这一技术。果实采摘作业是整个生产过程中最费时费力的环节,如果在生产过程中引进一种智能采摘机器人,实现采摘果实的智能化与机械化,不仅可以提高生产效率,还具有一定的现实意义,这也是农业现代化的必然趋势。果实的识别与定位决定了采摘的效率,本文通过OpenMV与单片机相互通信使机器人在采摘过程中对机器人手臂的定位抓取进行研究,实现了果实的有效识别定位与定点采摘。
关键词:图像识别;OpenMV;智能化;采摘机器人;机械化
我国工程技术一直以实践为主,理论为辅。在过去的项目研究中,因为理论基础不完善,研究人员多數质量不够,经费预算等原因使得我国科学技术的发展十分缓慢。科技水平是二十一世纪各个国家的核心竞争力,科技水平的高低关系到我们中华民族能否实现伟大复兴,在最近的几年里,我国科技创新体系愈发完善,各类前沿科技水平发展迅速,单一的传感器已经无法满足现代科技的需要,以人脸识别为代表的各种图像识别技术愈发重要。本文旨在借助Arduino为主控,OpenMV进行数字图像处理开发出不借助机械臂逆运动学而能够让机械臂定点识别到准确目标实行采摘的采摘机器人手臂的开发进行研究,为以后的机械臂设计提供一定参考。
1 图像识别在当代科技中的现状
1.1图像识别现状
图像识别的发展有三个阶段:文字识别、数字图像处理与识别以及物体识别。文字识别最为简单,一般只是识别字母,数字以及符号,应用很广泛。数字图像较模拟图像相比有着聚到优势,比如他传输方便可压缩、传输过程中不易失真、处理方便等等,这些优点都为物体识别提供了强大理论基础及动力。物体识别主要是对三维世界的物体进行感知和认识,它是以数字图像处理与识别为基础上更深层次的应用,其研究成果广泛应用与各种人工智能与军事上,是当代科技最重要的研究方向之一,引起了国家的一度重视,为培养科技创新人才,在我国各种科技竞赛中,都加入了摄像头元素,为我国图像识别以及科技创新领域增添新鲜血液。
1.2OpenMV的优势
当今能够进行图像识别的元器件有很多,最为常见的为OpenMV与OpenCV。OpenCV一个基于BSD许可发行的跨平台计算机视觉库,可以运行在Linux、Windows、Android等操作系统上,可扩展支持Python的机器视觉模块,它是一个通用的软件项目,在嵌入式上运行需要相当大的代码量。而OpenMV是一个硬件项目,它集成了图像的算法,它是一个开源。低成本且功能强大的视觉模块,以STM32F427CPU为核心,集成了OV7725摄像头芯片,它被俗称为带机器视觉功能的Arduino,它较OpenCV来说操作简单直接,造价低。所以说,在大多数数据量较小的项目中,OpenMV绝对是不二的选择。
2机械手臂的组装及实践
2.1设备概括
2.1.1Arduino介绍
Arduino是一款使用非常灵活而且方便的开源电子原型平台。是由一科研团队于欧洲2005年冬季开发出来的。它具有使用类似java、C语言的Processing/Wring开发环境,但是相较正常的c语言更为简单灵活,格式自由,功能强大,适用于绝大多数的场合。Arduino主要包括两部分:一是由各种线路连接的Arduino电路板,另一个则是Arduino IDE。你只要在IDE中编写相应的程序代码,IDE即可告诉Arduino应该要做些什么。
2.1.2舵机控制板介绍
本课题选择的舵机控制板为乐幻索尔公司所开发的舵机控制板,此舵机控制板CPU采用ARM Cortex-M3内核的高性能STM32单片机,可高精度控制16路、32路舵机运动,速度快慢可自由调节,本课题需要控制机械臂上的5个舵机,出于实用性与经济型考虑,选用了16路舵机控制板。此控制板连接方式简单,控制板有正负两路电源接口,开关内置,使用方便,支持在线调试,在电脑上不需要装任何驱动。此控制板有16M的内存,可以容纳230个动作组,每个动作组可以容纳510个动作。支持两种脱机运行模式,可以脱机运行1次,也可以脱机无限次反复运行。支持串口通信,本课题将Arduino与此舵机控制板相通信。
2.2Arduino与舵机控制板通信
此部分意在解决将OpenMV给Arduino发出的电平信号加以引用,使机械臂做出相应动作进行详细解释。Arduino与舵机控制板连线为将arduino的TX与RX引脚和舵机控制板的RX与TX引脚相连,此部分请注意,一定使反接。再将两板的gnd相连,舵机控制板外接7v~8.4v直流电压供电即可。
2.3实验概括
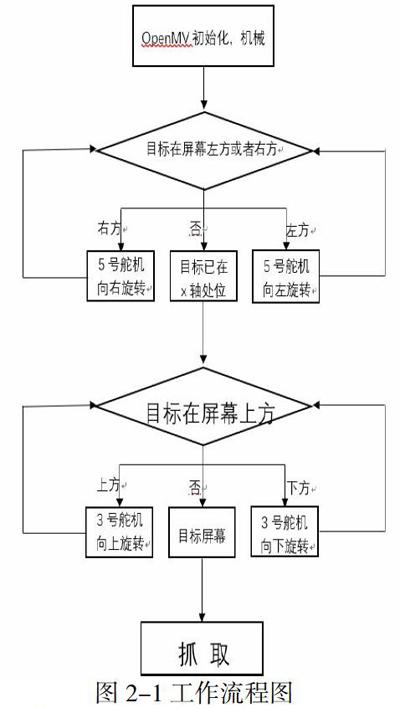
2.3.1工作流程图
图2-1 工作流程图
2.4.2 实验说明及探索
由于实验涉及到5个舵机的控制,在调试中应注意舵机的旋转角度避免舵机堵转烧毁,在调试舵机的时候速度一定要慢,如果舵机在某种情况下运动不到命令所给的位置,那么舵机一定会烧毁,造成不必要的经济损失。
在OpenMV与Arduino通信时试过了很多通信方式,比如spi通信等,发现操作难且不易控制,在OpenMV发送给Arduino信号时,OpenMV不稳定,容易造成死机。经过多次实验,电平“通信”虽然不算是一种真正意义上的通信,但是其稳定性是非常好的。
3 结论
在本文中介绍了OpenMV与Arduino通信,Arduino与舵机控制板通信,介绍了OpenMV与Arduino的发展历程,并用OpenMV进行颜色识别寻找目标后和Arduino进行一系列配合之后精准实现目标定位来抓取目标,通过本文研究可以深入了解OpenMV与Arduino功能的强大与使用,为未来的竞赛以及个人作品提供一些帮助。
参考文献:
[1] Eric Matthes《Python编程从入门到实践》[M].2019.
[2] 米歇尔,麦克罗伯茨,杨继志,等.《Arduino 从基础到实践》[M]. 北京:电子工业出版社,2013.
[3]刘静,林冲,郭世财,彭宗玉.柑橘类水果采摘机器的设计与研究[J].包装工程,2019,40(17)
[4]田渠,罗淦,尹海涛.基于OpenMV的智能跟踪小车设计[J].计算机测量与控制,2019,27(08)
[5]李晋.基于openmv智能机械手臂创新实践课程探索[J].电脑知识与技术,2018,14(31)
作者简介:
金彦继(2000—),男,汉族,延边大学农业机械化及其自动化专业,本科生.
通讯作者:
赵德金(1975—),男,汉族,博士.
