速度闭环控制在提升电动车坡道驾驶性的应用
2019-10-20肖小城王春丽章友京倪绍勇沙文瀚
肖小城 王春丽 章友京 倪绍勇 沙文瀚
摘要:本文提出了一种通过控制速度闭环提升纯电动汽车坡道驾驶性的方法。该方法解决未配备液压辅助功能的电动车在坡道上溜坡的问题、通过对车辆状态的检测,利用电机低速大扭矩的特点,控制电机保持零转速,可以实现电动汽车的坡道辅助和自动驻车功能,通过此方法可以改善电动汽车坡道的驾驶性,经过实车验证,此方法效果明显。
关键词:电动汽车;坡道驾驶性
中图分类号:U469.72 文献标识码:A 文章编号:1005-2550(2019)05-0060-05
肖小城
肖小城,毕业于郑州大学,检测技术与自动化专业硕士研究生,现工作于奇瑞新能源汽车技术有限公司,整车控制策略主管师,负责纯电动汽车整车控制策略开发和验证。目前已经发表论文4篇,获得专利10余篇。
1 前言
电动汽车(Electric Vehicle,EV)由于其在環保方面具有突出的优势,越来越受到汽车行业的青睐。电动汽车核心电驱动系统具有低速大扭矩、无怠速的特点,与传统内燃机存在很大的差异,通过对电驱动系统零转速的精确控制,可以实现电动车辆的坡道辅助和自动驻车的功能。所谓零转速是指,通过控制电驱动系统的扭矩维持电机转速为零。传统燃油车实现坡道辅助的功能基本是通过对液压系统的保压,制动车轮的方式实现。孙延[1]基于EPB系统对坡道辅助的起步策略进行研究,通过仿真验证了动态输入参数方式的有效性;沈忱[2]等基于ESC系统设计了汽车坡道起步辅助功能的策略,并进行实车标定验证有效性;王洪伟[3],提出气压式电子驻车制动系统,通过控制制动气室内的压力,推动推杆保持制动车轮,实现驻车目的;胡建军[4]等对起步扭矩控制中对溜坡扭矩进行了考虑,但未实现闭环的控制。本文提出的方案完全不依赖于液压系统的保压,而是控制电驱动系统的零转速实现起步辅助,提高坡道的驾驶性,同时降低成本。
2 纯电动车坡道动力学分析及零转速控制架构
2.1 纯电动车的坡道受力分析
为了提升坡道的驾驶性,主要为了解决电动车坡道后溜车,对电动车在坡道上的受力分析情况如图1所示:
图1可知,电动车在坡道上静止将要起步时,受到的力有驱动力Ft,坡度阻力Fr,车辆起步瞬间受到的滚阻,空气阻力等Fao
Ft=T×i×η/r;(1)
Fr=G×sinθ;(2)
Fa=G×f×cosθ+Cd×A×V×V/21.15(3)
其中,T为驱动系统输出扭矩,i为传动系统速比,η为传动系统的效率,r为驱动轮半径;G为车辆重力,θ为坡道值,f为滚动阻力系数,Cd为空气阻力系数,A为迎风面积,V为车速;为了实现坡道起步辅助的目标,需要控制电驱动系统输出扭矩T满足Ft=Fr+Fa的关系,由于车辆驻在坡道上,车速为零,所以可以忽略Fa,即Ft=Fr;由电驱动系统的驱动扭矩平衡坡道阻力[5]。
2.2 零转速控制架构
在2.1中已经分析了电动车在坡道上的受力情况,为了实现坡道辅助或者自动驻车的目的,需要精确的控制车辆在坡道上驻车。本文提到的零转速控制以车辆控制器(VCU)为控制核心,同时以电驱动系统(MCU)作为检测和执行单元,辅佐坡道传感器作为坡道大小探测,为精确的零转速控制提供预控制扭矩,同时VCU还需要采集档位,油门,制动等信号来判断驾驶员意图,实现坡道辅助或者自动驻车功能的激活,通过仪表模块(ICM)实现人机交互。图2为零转速控制系统架构。
VCU以lOms为周期对油门,档位,制动,坡度,驻车开关的输入状态进行采集,作为坡道起步辅助功能激活的判断条件,同时以lms为周期的任务调度与MCU之间进行扭矩的控制交互,保证控制的实时性;VCU与ICM之间以500ms进行周期性信息显示,主要人机交互内容包括:辅助功能预激活提示,辅助功能激活,辅助功能故障等重要信息。零转速控制以PID控制为核心,以坡度值计算预控制扭矩,以车辆半载作为标定目标车辆,通过标定完成初始值设定。当坡道辅助功能激活时,以一定梯度加载预控制扭矩保证车辆扭矩平顺性,以目标转速为零,进行PID控制;当坡道辅助功能退出时,以当前控制扭矩为初始值,以一定梯度进行扭矩变化,保证扭矩加减载的平顺性。控制框图如图3所示。
3 坡道起步辅助控制实现
3.1 坡道辅助功能实现
坡道辅助(Hill Assistance Control,HAC)功能在传统燃油车上的实现是:车辆依靠液压制动停稳在坡道上后,通过液压系统的保压,维持3-5秒时间,给驾驶员足够时间实现倒脚。3-5秒后,液压释放;或者驾驶员请求驱动力大于液压制动力,液压自动释放,保证在坡道上驾驶性。本文以在研A000级电动车为控制对象,对速度闭环控制优化坡道驾驶性进行有效性验证。车辆基本信息:整备质量1015kg,电机峰值扭矩125Nm,峰值功率33kw,电池容量32kwh,车辆配置ABS系统,但无液压辅助功能。通过零转速控制HAC功能实现的条件:
a).车辆停稳;
b).档位为驱动档位(D/R);
c).驱动系统准备就绪;
d).油门小于阈值2%;
e).坡道辅助开关开启;
f).坡度值大于阈值;
上述条件同时满足时,激活坡道辅助功能。根据制动踏板行程,对控制扭矩进行系数限制,防止制动完全踏下情况下,加载过大扭矩出现窜车现象,控制系数与制动踏板行程关系如图4所示。针对文中A000级电动车标定的预控制扭矩如图5所示。
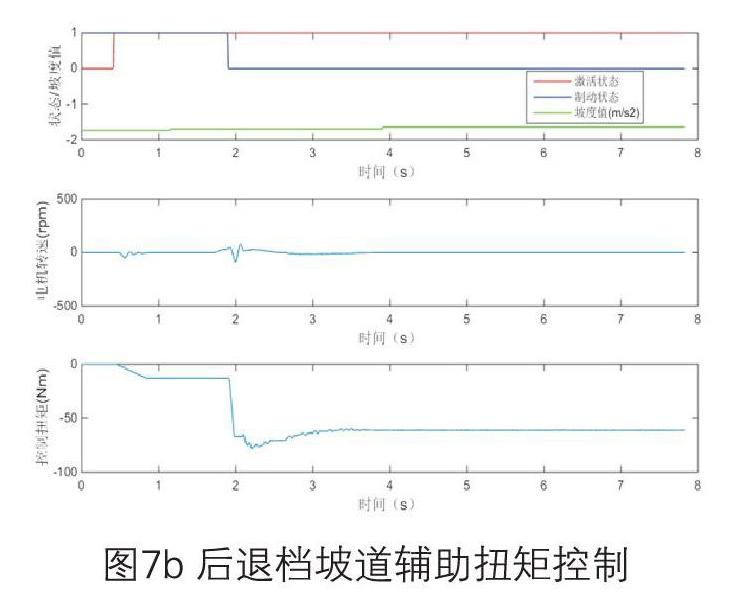
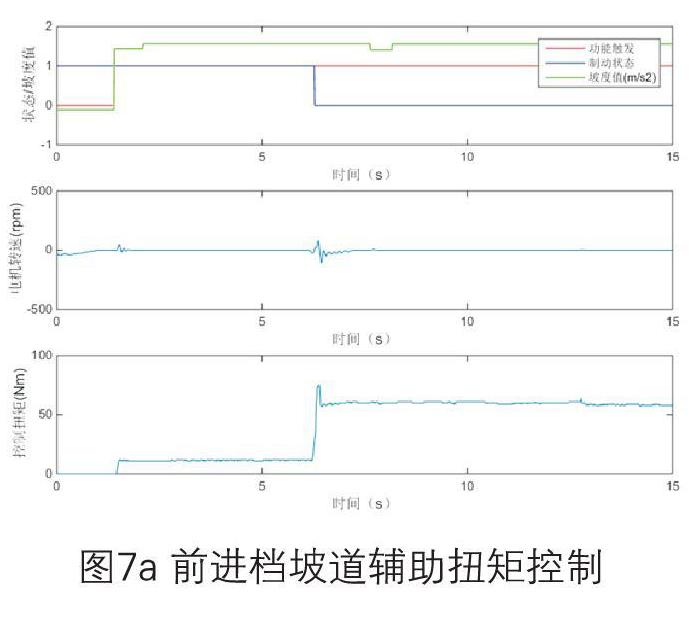
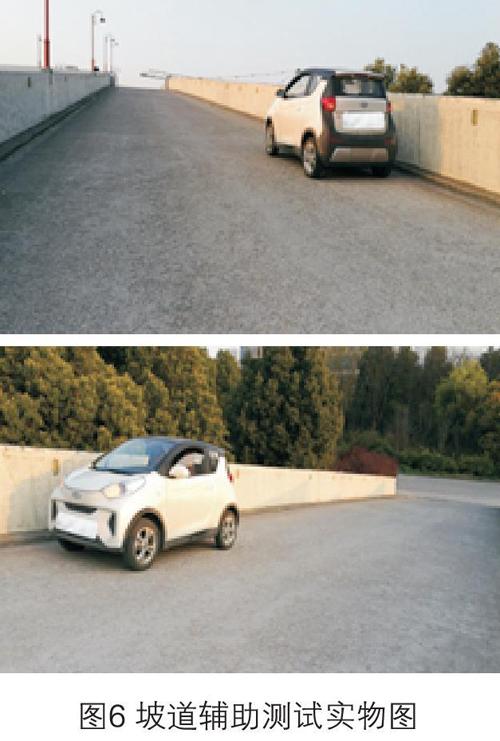
以8°坡为实例,对加载扭矩进行控制,如图6,坡道辅助测试实物图。图7a为前进档坡道辅助扭矩控制,图7b为后退档坡道辅助扭矩控制。从图中可以得知,在坡道上车辆停稳后,坡道辅助功能触发,制动踏板踏下后,控制扭矩被限制,当制动踏板释放后,结合目标转速进行反馈控制,预控制扭矩和PID控制可快速让电机转速控制在目标值,转速波动±50rpm,结合实际整车表现,松开制动后,整车可停驻在坡道上,不出现后溜,对提升驾驶性有明显的提升。
在坡道辅助功能激活后,下列条件:
f).坡道辅助开关关闭;
g).档位切换到空档;
h).驱动系统不可用;
I).驾驶员通过油门请求扭矩大于辅助扭矩同时油门开度大于设定阈值4%;
k).电驱动系统或者电池系统故障或者坡度传感器故障;
满足上述条件之一,退出坡道辅助功能。设定两种退出坡道辅助功能工况。第一,通过档位退出坡道辅助功能;第二,驱动扭矩大于辅助扭矩,测试两种工况下扭矩控制与转速波动情况。如图8a,挂人空档退出坡道辅助功能,档位挂人空档后,立刻退出坡道辅助功能,为了防止扭矩突然卸载导致车辆出现强烈冲击,通过对零转速控制时的扭矩进行接管,按照设定的梯度进行扭矩的递减直到为零,保证退出时的平顺性。从实验数据可知:扭矩经过约600ms后变为零,在卸载过程中,转速的波动约为±30rpm,从整车表现来看,平顺性良好;如图8b,加大油门开度,当驱动扭矩大于零转速控制扭矩后,退出坡道辅助功能,此时,控制扭矩跟随油门请求扭矩,保持加载的平顺性,从实验数据可看出,起步平顺,转速波动大约为±25rpm。
3.2 自动驻车功能实现
自动驻车(AUTOHOLD)在传统车上实现是通过EPB/ESP系统的保压,直到驾驶员请求驱动力大于驻车制动力,自动释放,车辆平稳起步。在本文中通过速度闭环的控制也可以实现自动驻车的功能。自动驻车功能触发条件为:
a).档位为D档;
b).自动驻车开关开启;
c).通过制动将车辆停稳保持2秒;
d).驱动系统准备就绪;
上述条件全部满足时触发自动驻车功能,此时通过图3的控制框图以电驱动系统零转速作为控制目标,通过扭矩控制,实现车辆驻车的目的。当以下任一条件满足时,退出自动驻车功能:
e).档位为非D档:
f).驱动系统不可用;
g).驾驶员通过油门请求扭矩大于辅助扭矩同时油门开度大于设定阈值4%;
h).电驱动系统或者电池系统故障或者坡度传感器故障;
I).自动驻车开关关闭;
通过对以下两个典型工况:平路上开启自动驻车;8°坡道开启自动驻车,验证自动驻车功能的有效性。图9a为平路上自动驻车扭矩控制,图9b为坡道上自动驻车扭矩控制。通过数据分析可看出:以电机的零转速作为控制目标,可以实现自动驻车的功能,在平路上,满足上述自动驻车条件后,车辆平稳的实现了驻车,当驾驶员踏下油门后,请求扭矩大于驻车扭矩,车辆平稳起步;在坡道上时,条件满足后,自动驻车功能激活,由于制动踏板踏下,限制驻车扭矩,当完全松开后,驻车扭矩增加,扭矩快速调节,转速出现很小波动(±80rpm),随后驾驶员请求扭矩,加载平顺,大于驻车扭矩后,实现平稳起步。
4 结论
本论文重点验证了通过速度闭环的思想控制电机速度实现坡道辅助和自动驻车的功能,通过实车验证,该方案可以用于解决未配置液压辅助功能的纯电动车坡道溜坡的问题,实验数据表明:方法有效,且无需对系统进行特殊的改造,结构简单,成本低,具有一定的工程实践价值。在该方法实施过程中,需要考虑电驱动系统在零转速控制状态下的散热问题,在实车开发过程中可与车辆的热管理系统联动保证驱动系统的正常工作。
参考文献:
[1]孫延.EPB电控驻车制动系统坡道辅助起步控制策略研究[A].第14届国际汽车交通安全论坛[C],2017,长沙,230-239.
[2]沈忱,刘继峰等.基于ESC系统的坡道起步辅助功能研究[A].中国汽车工程学会年会论文集[C],2015,810-813.
[3]王洪伟,王俊伟,章健国.自动驻车制动控制系统在商用车的设计研究[J].汽车实用技术,2017(21):76-81.
[4]胡建军,杜瑞,吉毅等.纯电动汽车起步控制策略[J].重庆大学学报,2013,36(8):19-25.
[5]余志生.汽车理论[M].北京:机械工业出版,2009,15-18.
基金项目:安徽省科技重大专项(16030901035)奇瑞全铝车身AO级纯电动SUV研发及产业化资助
