电动式牛顿环示教仪控制系统的研制
2019-10-18张新磊
张新磊
(北京农学院基础教学部 北京 102206)
在大学物理实验课程中,“利用牛顿环测量平凸透镜的曲率半径”是一项非常经典的光学实验,其旨在观察等厚干涉现象,了解相关原理,让学生对光学干涉实验产生感性的认识.但是,受实验条件及实验设备限制,这项实验在授课过程中面临着各方面的问题.由于传统的读数显微镜采用机械式结构,因此读数精度有限,且容易出错;实验中需要长时间用肉眼盯住读数显微镜的目镜进行观测,极易造成视觉疲劳,引起误读,干涉条纹无法直观显示,也不利于教师的讲解;此外,镜筒底端的聚光头会经常触碰到牛顿环装置,造成平凸透镜的镜片产生磨损.这些问题不仅对授课造成影响,更令实验数据有所偏差,长期使用对实验耗材也会造成一定的损坏[1].
针对上述问题,本课题在传统机械式读数显微镜的基础上加以改进,利用现代化电子技术解决传统实验的问题,在实验教学中,设计并实现了一套基于ATMEGA128单片机的电动式牛顿环示教仪控制系统.实验结果表明,系统在提升读数精度,优化读数方式,减少镜片磨损方面都有所改进.相对于传统的机械式读数显微镜,本系统具有读数直观、易于讲解等特点,具有良好的示教作用.
1 牛顿环实验原理
牛顿环干涉原理图如图1所示,将一曲率半径很大的平凸透镜放于平板玻璃上,使其凸面与平板玻璃接触,两者之间形成一个同心带状空气层.若以波长为λ的平行单色光垂直入射,入射光将在此薄膜上下两表面反射,两束反射光因具有一定的光程差而产生干涉现象.
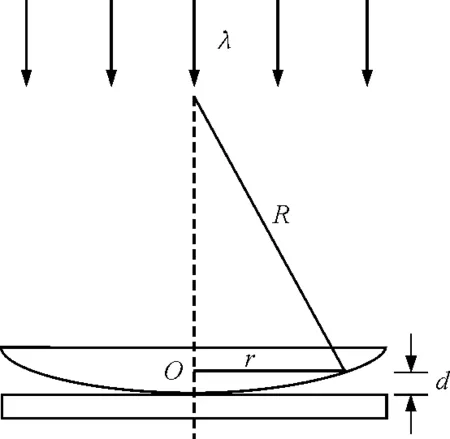
图1 牛顿环干涉原理示意图
从透镜俯视,干涉图样应是以两玻璃接触点为中心的一组非等间距的、明暗相间的同心圆环,称为“牛顿环”,如图2所示[2].
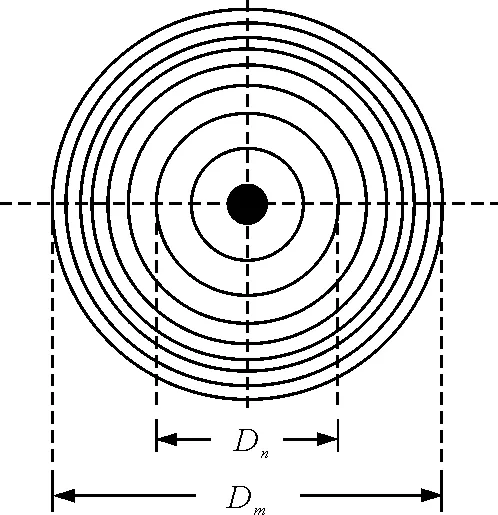
图2 牛顿环干涉条纹
由于透镜和平板玻璃接触处受接触压力会产生弹性形变,且接触处也可能存在尘埃,使干涉圆环中心不是一个暗点,而是一个不规则的圆斑,造成干涉圆环的级次k难于准确测定.因此,在实际测量中不测量暗环半径,而是测量彼此相隔一定环数的暗环直径.假定中央暗斑含有k级,第k+n级和第k+m级暗环直径分别为Dk+n和Dk+m,则平凸透镜的曲率半径R为
(1)
式(1)表明,平凸透镜的曲率半径R只与任意两环的直径平方之差和相应的环数差有关,而与干涉级次无关[3].
2 传统读数显微镜的弊端
传统的机械式牛顿环读数显微镜如图3所示.
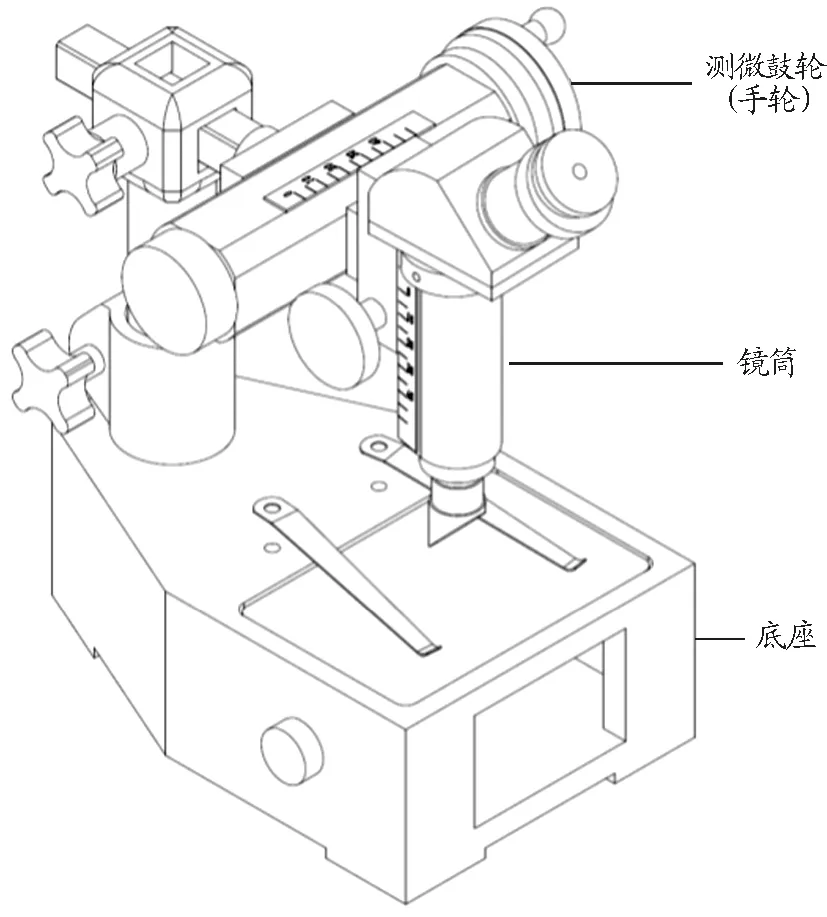
图3 传统机械式读数显微镜
其主要由目镜、镜筒、横梁、手轮、底座等几部分构成.目前,用传统的机械式读数显微镜测量牛顿环平凸透镜的曲率半径,存在的弊端主要有以下几个方面.
2.1 读数精度有限
传统的读数显微镜主要采用机械式原理,数据的读取方式是通过转动侧边的手轮,利用其内部的齿轮结构带动镜筒在水平方向进行移动,最终的读数结果由横梁上的主尺读数与手轮上的副尺读数相加得到.由于主尺上的最小分度为1 mm,而副尺上的小格有100个,故测量精度只有0.01 mm,小于0.01 mm只能靠估读,因此读数精度有限[4].由于实验多在暗室中进行,周围环境较暗,故而极易读错.
2.2 不易观察干涉条纹
用传统的机械式读数显微镜观测牛顿环干涉条纹时,需要用肉眼长时间盯住目镜来进行观测,且随着牛顿环级数增加,环间距越发紧密,极易造成视觉疲劳.在此状态下,容易引起读数错误,造成实验数据混乱.另外,教师无法将实际的干涉条纹向学生进行面对面讲解,不利于实验授课的进行.
2.3 牛顿环装置的平凸透镜易磨损
传统的读数显微镜由于结构设计不合理,镜筒底端的聚光头经常会触碰到牛顿环装置顶部的平凸透镜,长期使用会引起磨损[5].
3 具体改进方案
针对传统的读数显微镜上述3方面的问题,设计并实现了一套基于单片机的电动式牛顿环示教仪控制系统.系统基于AVR芯片ATMEGA128构建主控电路,利用主控电路产生2路控制信号PWM方波,经步进电机驱动器后,作用至双轴滑轨,带动显微镜进行移动.通过调节竖直方向的滑轨位置来带动显微镜的高低变化,进而调节焦距;通过调节水平方向的滑轨位置来改变显微镜的左右位置,并通过记录水平方向PWM方波信号输出的数量,来确定水平滑轨的行进距离,进而达到读数的目的.双轴滑轨的启动与停止由主控电路的按键进行控制,水平方向PWM方波输出的数量则由数码管进行显示.牛顿环的干涉条纹则由目镜上的摄像头捕捉,并外接显示器进行显示.为防止镜筒底端的聚光头触碰到牛顿环的平凸透镜,特加入限位开关,达到限制竖直方向滑轨移动的目的.整体系统的设计框图如图4所示[6].
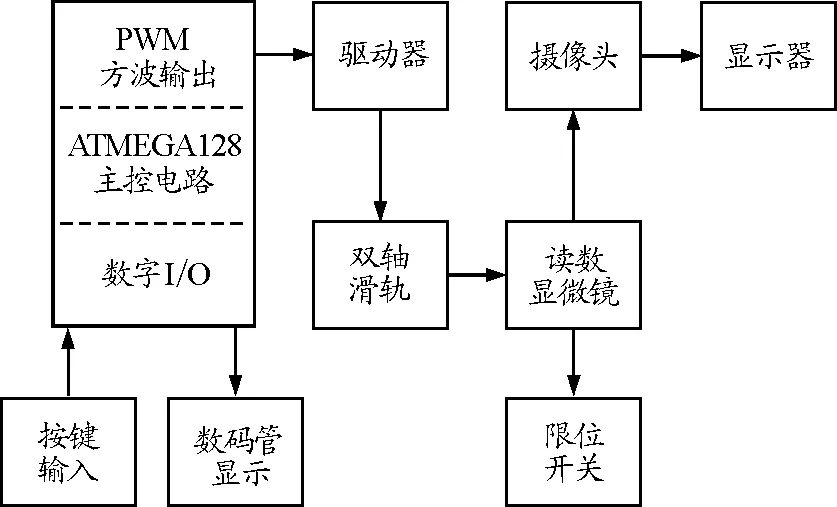
图4 电动式牛顿环示教仪控制系统框图
3.1 利用滑轨提高读数精度
电动式牛顿环示教仪控制系统的结构图如图5所示,主要采用双轴滑轨带动显微镜的镜筒进行竖直和水平方向的移动.其中,竖直滑轨用来调节显微镜的焦距,水平滑轨则用来调节显微镜的水平位置,使其内部的十字叉丝对准不同级次的牛顿环条纹外沿,进而读取数据.
显微镜在水平方向移动时,由滑轨内部的步进电机推动.步进电机每旋转一周,则显微镜在水平方向移动4 mm;为了提高测量精度,通过设置滑轨前端步进电机驱动器上的拨码开关,控制驱动器的细分数,使步进电机每接收N个PWM方波信号旋转一周,此时显微镜在滑轨的带动下,在水平方向移动4 mm.在此状态下,则步进电机每接收1个控制信号,显微镜实际移动的距离为4 mm/N,即测量精度δ为4 mm/N.具体的N取值和测量精度δ之间的关系如表1所示[7].
通过设置驱动器上拨码开关SW4至SW6的开关状态,即可调节N值的大小.具体关系如表2所示.
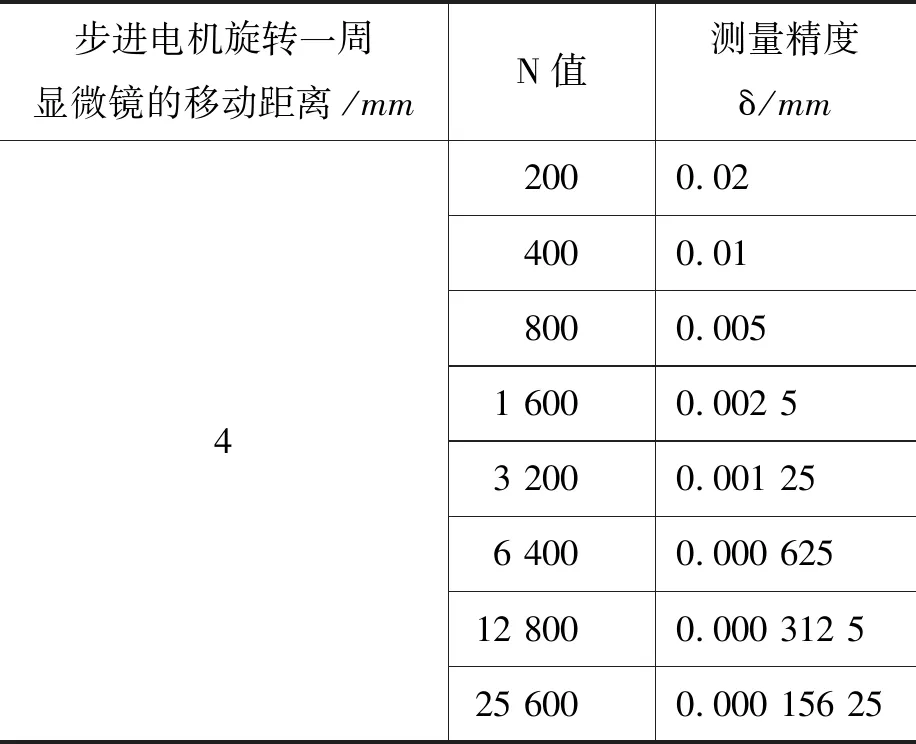
表1 N值与测量精度之间的关系
在实际应用中,测量精度δ通常选用0.002 5 mm或0.001 25 mm,即N值设置为3 200或6 400为宜.与传统机械式读数显微镜相比,改进后的数据精度大幅提升,可满足实验要求.
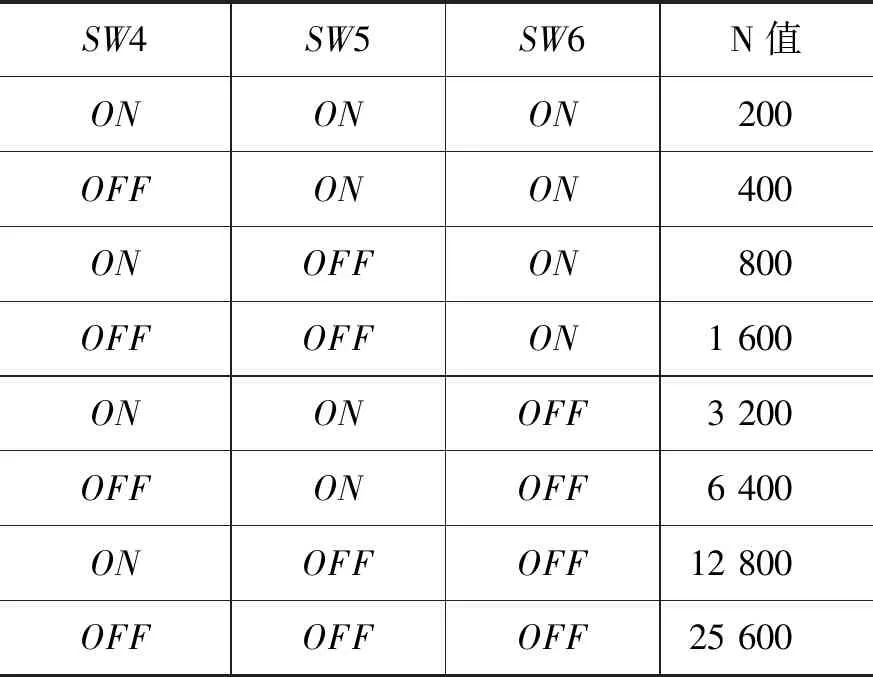
表2 驱动器拨码开关的状态与N值之间的关系
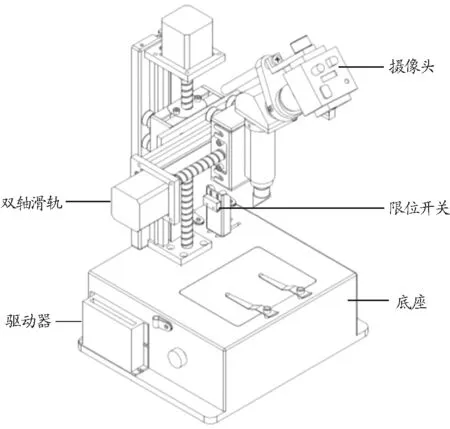
图5 电动式牛顿环示教仪控系统结构图
当显微镜在水平方向进行移动时,利用单片机探测水平滑轨内部步进电机的移动方向,并对作用至步进电机的PWM方波信号数量进行捕捉计数.若水平滑轨内部的步进电机沿顺时针旋转,则显微镜向左平移,信号总数递增;若步进电机沿逆时针旋转,则显微镜向右平移,信号总数递减.
在实验操作中,先将显微镜的十字叉丝调节到牛顿环干涉条纹的正中心,将信号总数清零.接下来,通过按下控制电路板的左移按键,即可触发滑轨带动显微镜向左匀速平移,松开按键则停止.当显微镜的十字叉丝对准左侧某一级的条纹外沿时,立刻松开按键,则此时显微镜停止移动,单片机将信号总数在数码管上进行显示[8].
由于数码管上显示的信号总数亮度较高,颜色鲜明,因此数据不容易读错.
当显微镜的十字叉丝对准左侧第k级的牛顿环条纹外沿时,设测量精度为δ,信号总数为Mk,则牛顿环左侧第k级条纹半径的读数值rk为
rk=δMk
(2)
在将牛顿环左侧条纹观测完毕,并将左侧数据记录完整后,按下控制电路板的右移按键,调节显微镜向右平移,依次记录右侧条纹读数.注意此时不要将数据清零,更不要改变测量精度δ.当显微镜的十字叉丝对准右侧第k级的牛顿环条纹外沿时,设测量精度为δ,信号总数为Mk′,则牛顿环右侧第k级条纹半径的读数值rk′为
rk′=δMk′
(3)
在此情况下,第k级条纹的直径为
Dk=δ|(Mk-Mk′)|
(4)
根据式(4)即可测量不同级次牛顿环条纹的直径,并根据式(1),计算出平凸透镜的曲率半径R.
3.2 在目镜上加装摄像头
传统的读数显微镜需要长时间用肉眼盯住目镜观测干涉条纹,极易造成视觉疲劳,进而引起数据误读,不利于实验.为解决这一问题,改进后的系统在显微镜的目镜上方加装了摄像头,并在摄像头的输出端配置了显示器(图中未标出)[9].实验中可直接通过显示器观测干涉条纹,极大地缓解了眼部的不适.此外,教师在授课的过程中也可在显示器上看到牛顿环干涉条纹,可直接向学生进行讲解演示,授课效果更加直观、生动.
3.3 增加限位开关
为了防止读数显微镜镜筒底部的聚光头与牛顿环装置上方的平凸透镜产生接触磨损,在竖直方向的滑轨底部增设了限位开关.当镜筒底端的聚光头要触碰到牛顿环装置时,系统就会触发限位开关,使竖直滑轨无法向下继续移动,防止聚光头与其产生接触,以减少实验器材的磨损[10].
4 实验结果
在使用改进后的牛顿环示教仪进行实验时,首先采用波长λ为589.3nm的单色钠黄灯光照射仪器的进光口,调节半反光镜至显示器上亮度适宜.配置步进电机驱动器上的拨码开关,选择好测量精度δ(本实验选择测量精度δ为0.001 25mm).调节竖直滑轨,以控制显微镜的成像焦距,直至显示器内视野清晰.
接下来按3.1中所述方法,分别测量出不同级次牛顿环条纹左侧与右侧的条纹半径,进而计算出不同级次牛顿环条纹的直径.
为测试改进后仪器数据的可靠性,保持其余实验条件不变,采用传统的机械式读数显微镜和改进后的电动式牛顿环示教仪分别对同一个牛顿环装置进行测量,并根据式(1)计算出平凸透镜的曲率半径(其标称值为1.0m),并将实验结果进行对比.测量数据分别如表3和表4所示.
实验结果表明,采用传统的牛顿环示教仪测定的曲率半径为0.872m,与标称值间的百分差为 12.8%;而用改进后的电动式牛顿环示教仪测定的曲率半径为0.969m,与标称值间的百分差为3.1%.
数据表明,改进后的牛顿环示教仪结果与标称值间的百分差值更小,且测量精度更高,适用于大学物理实验课程的授课与实验操作,从而提高了本实验的授课效果和学生实验的质量.
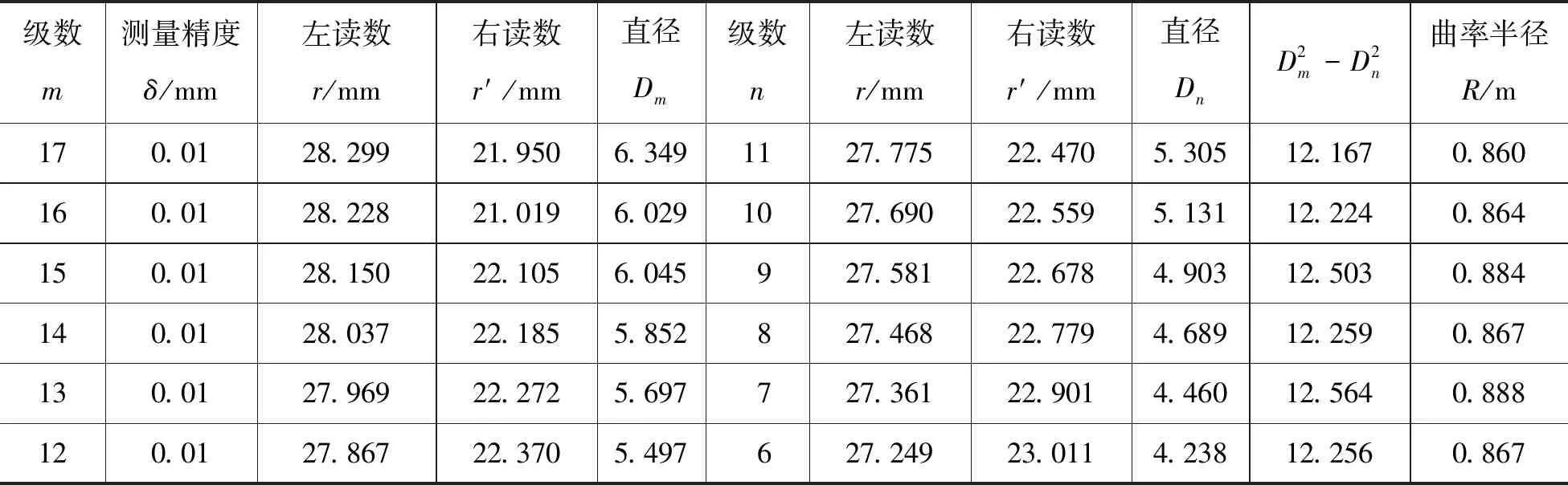
表3 传统机械式读数显微镜的测量数据
曲率半径:R=0.872m;与标称值间的百分差Δ=12.8%.

表4 电动式牛顿环示教仪的测量数据
曲率半径:R=0.969m;与标称值间的百分差:Δ=3.1%.
5 结论
针对大学物理实验课程“利用牛顿环测量平凸透镜的曲率半径”实验中,传统的机械式读数显微镜存在读数精度低、观测干涉条纹易造成视觉疲劳、牛顿环装置的镜片易磨损等问题,设计并实现了一套基于单片机的电动式牛顿环示教仪控制系统.系统基于AVR芯片ATMEGA128构建控制电路,利用控制电路产生2路控制信号PWM方波,经步进电机驱动器后,控制后端双轴滑轨,带动显微镜进行移动.双轴滑轨的启动与停止由控制电路的按键控制,信号总数则由数码管进行显示.牛顿环的干涉条纹则由目镜上的摄像头捕捉,并在外接显示器上输出显示.为防止镜筒底端的聚光头触碰到牛顿环装置,特在系统中加入限位开关,以防止显微镜位置过低,与牛顿环的平凸透镜产生接触磨损.
实验结果表明,与传统的机械式读数显微镜相比,本系统具有读数直观、易于讲解、镜片不易磨损等特点,其测量结果与标称值间的百分差值更小,且测量精度更高,非常适用于大学物理实验的教学及实验操作,具有良好的示教作用.
