基于平流层飞艇的气象探测技术探索
2019-10-15王柏林杨加春郭虓
王柏林 杨加春 郭虓
(1中国华云气象科技集团公司,北京 100081;2天津华云天仪特种气象探测技术有限公司,天津 300384;3北京航空航天大学前沿科学技术创新研究院,北京 100191)
0 引言
平流层飞艇的工作高度介于常规航空器的最高飞行高度和航天器的最低轨道高度之间,是跨接航空与航天的新兴领域,具有重要的军民两用价值和战略意义。在军用领域,可作为信息平台用于通信保障、侦查监控、情报搜集、导弹防御和安全预警等[1-4];在民用领域,可替代同步卫星进行通信中继、防震减灾、空中运输、大气环境监测和紧急求助等[5-8]。近年来,欧洲和美国投入大量资金用于支持多项平流层飞艇研发项目[9],中国对平流层飞艇的研究始于“十五”期间,多个高校和研究所针对平流层飞艇开展方案论证、关键技术攻关等基础性研究[10]。2009—2012年,北京航空航天大学先后4次完成20 km以上平流层高度飞行验证,取得了初步成果。中国科学院黄宛宁[11]提出了一种适合于平流层飞艇的艇囊内气体及囊体表面温度的测量方法,经过两次平流层飞艇的缩比飞行试验,对比同飞艇释放的探空仪珠状热敏电阻温度数据,初步验证了该方法测量温度数据的准确性,提出如想进一步提高温度测量精度,必须针对测量结果进行辐射误差修正。
本文所介绍的试验,是首次基于平流层飞艇平台从18 km高度在指定区域进行下投探空,在平流层完成了连续18 h的温度、湿度、气压等要素的观测,并获取了观测资料。初步验证了平流层飞艇平台搭载气象载荷进行气象观测应用的可行性。基于平流层飞艇的气象探测载荷与应用系统在平台飞行高度、驻空时间、载重量、可复用性等方面具有当前包括气象卫星、飞机、火箭和气球等载体不具备的平台优势。
1 试验目的
2017年8月27—28日在新疆某基地开展了平流层飞艇气象观测试验,采用北京航空航天大学研制的单囊体飞艇作为平台,该飞艇以氦气充浮,搭载蓄电池和太阳能电池板为供电系统,具有螺旋桨推进动力。飞艇于27日22:56从地面释放升空,大约23:44达到驻留高度18.6 km,经小幅调整后于次日00:35稳定在18.3 km高度,07:29日出后太阳能电池板开始蓄能,飞艇动力系统工作,驻留期间完成一个直径为25 km的圆形航线飞行,开展了两次小区域抗风驻留飞行试验,28日16:14开始下降(飞行轨迹见图1),共驻留18 h。
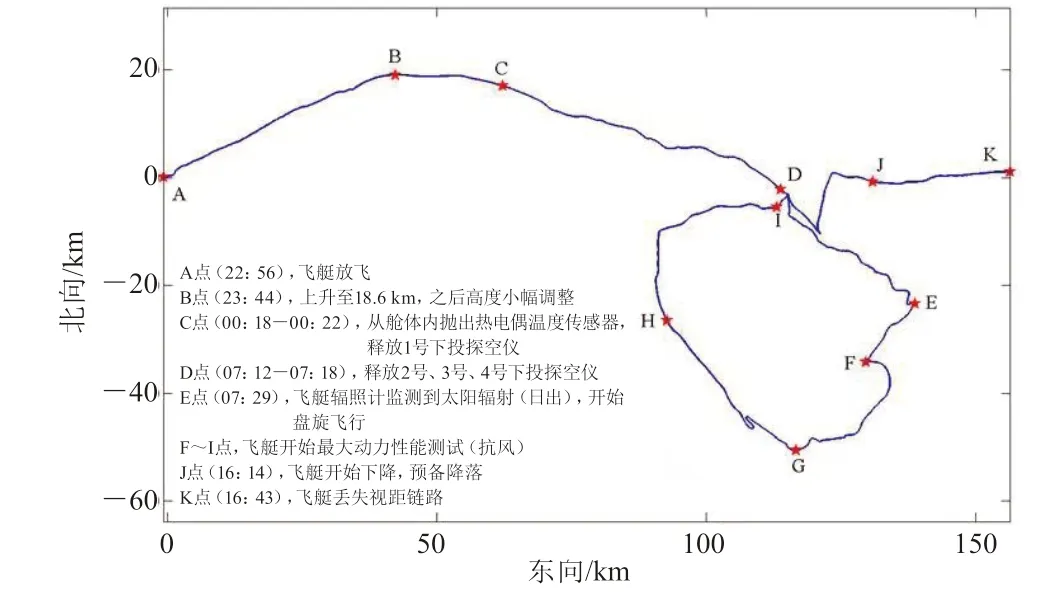
图1 飞行轨迹及操作时间Fig. 1 Flight track and operating time
飞艇搭载并下投4支导航探空仪,采集从平流层到对流层纵向大尺度气象数据,检验飞艇作为下投观测平台的可靠性和稳定性。飞艇在上升、悬停和下降过程中,受到太阳辐射、地面和云的反射辐射与长波辐射影响,同时自身还在向外发出长波辐射、与大气对流交换热量(图2)。因此,飞艇在不同悬挂高度搭载了多种类型的温度传感器,采集平流层气象数据,检验飞艇搭载气象载荷开展长时间、大尺度气象观测的可行性与可靠性,对飞艇平台温度观测布局方案进行了初评。
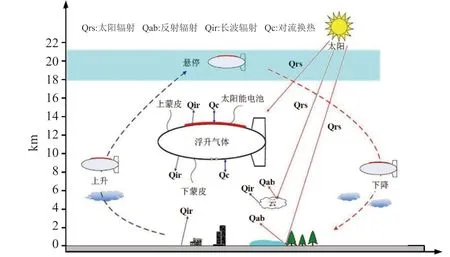
图2 飞艇上升、定点悬停和下降时面临的复杂热环境Fig. 2 Complex thermal environments faced by airships as they rise, hover and fall
本次飞艇试验开始前,各类型的艇载气象观测设备均在气象计量部门进行了检定并达到气象业务要求,但因空域限制,下降过程中采用了主动爆破措施,未能顺利回收飞艇及试验设备,缺少对参试气象传感器计量复检,故此次试验更多是飞艇气象观测原理方法探索和检验,部分结论还有待后期试验继续验证。
2 试验数据分析
2.1 艇载下投探空
下投探空仪采用导航测风模式的探空仪,主要由导航定位模组、400 MHz无线电发射模组、压温湿传感器测量模组等几个主要部分组成。利用导航定位模组进行空间实时定位,测定气球在高空大气中随时间漂移的速度与方向,从而计算出高空大气的风向风速;利用气压、温度、湿度(PTU)传感器实时测量大气的气象要素;利用400 MHz无线电发射机将定位数据和PTU数据发送到地面接收系统。探空仪温度传感器采用直接0.6 mm珠状热敏电阻,表面采用真空镀铝工艺涂覆防辐射层,具有响应时间短、测量准确度高、防辐射能力强的特点。湿度传感器采用高分子薄膜湿敏电容,具有低温响应快、全程测量准确度高的特点。
飞艇下部悬挂气象载荷舱(图3a),主要包括投放控制系统、测量存储系统、温度探头投放舱、探空仪投放舱等组成,负责系统的数据采集、存储、传输、舱内温场控制、仪器投放控制等功能。艇载气象观测数据借助测控系统回传至地面,探空仪观测数据通过400 MHz传回地面接收机。
1)探空仪下投过程
2017年8月28日00:22—07:45,飞艇平台从约18 km高度下投了4个探空仪,地面探空接收机共收到8300多条探空秒数据。
从表2探空仪的下降速度和持续时间来看:1、2、3号探空仪工作状态正常,4号探空仪下降速度较快、持续时间较短,疑似降落伞未能完全打开。1号探空仪于凌晨释放,飞艇搭载的可见光载荷未能采集到图像资料,2、3、4号探空仪于日出后释放,模拟图像载荷拍摄到气象载荷舱门打开、探空仪释放的瞬间,数字图像载荷拍摄到2号、4号探空仪初始下降的过程。从视频图像可见(图3b),遥控指令响应及时,舱门动作与探空仪释放正常流畅,与艇体之间没有干涉。
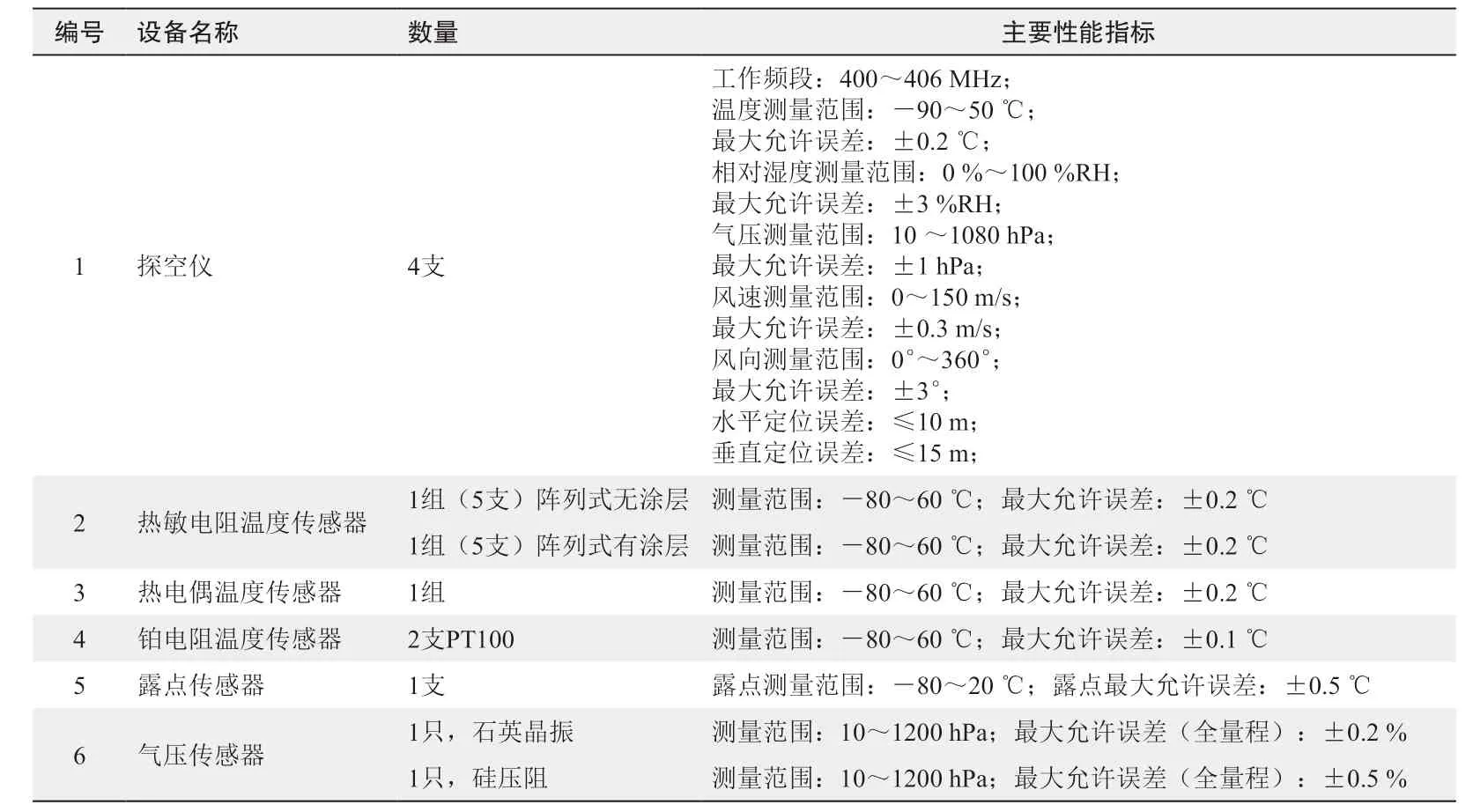
表1 艇载气象观测设备Table 1 Meteorological observation equipment on the airship
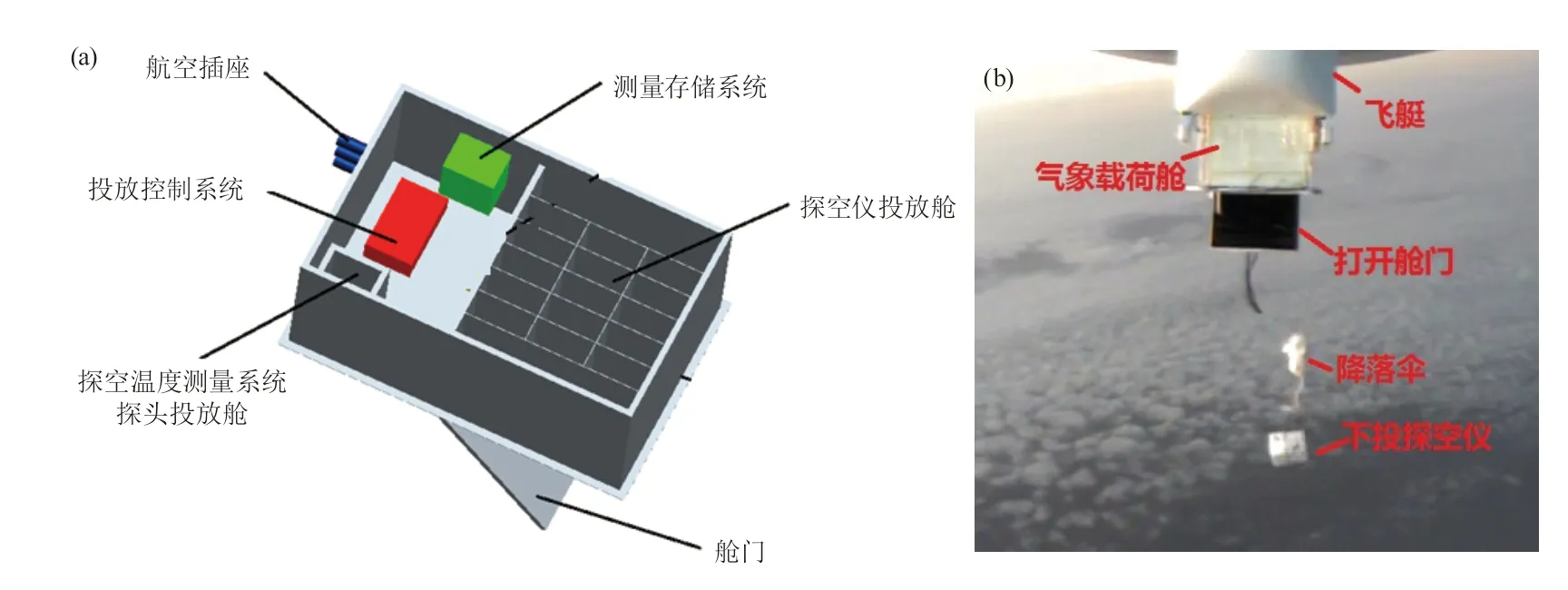
图3 艇载下投探空(a)气象载荷舱组成结构简图;(b)探空仪下投瞬间Fig. 3 Drop radiosonde from the airship(a)Brief diagram of the load compartment; (b)Drop moment

表2 下投探空仪释放情况Table 2 Dropsonde release information
2)下投探空廓线数据分析
图4为下落过程完整的温湿度廓线和风速风向廓线,验证了从平流层飞艇中下投探空仪的可行性。以2号探空仪为例,探空仪在下降至距离地面7362 m高度时,距离接收点的距离为186 km,仰角为1°,已经与理论计算视距接近,之后信号消失。
由于夜间只进行了1次下投测试,廓线数据无法进行比较。而白天3次下投探空仪间隔仅3 min左右,所测得的廓线可以进行分析比对。图5为3组温度、湿度的廓线图。
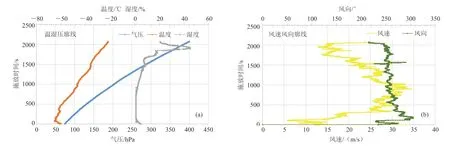
图4 下投探空仪(2号)温湿压(a)及风速风向(b)廓线Fig. 4 The temperature, humidity, pressure (a), wind speed, and direction (b) profiles of dropsonde (2#)
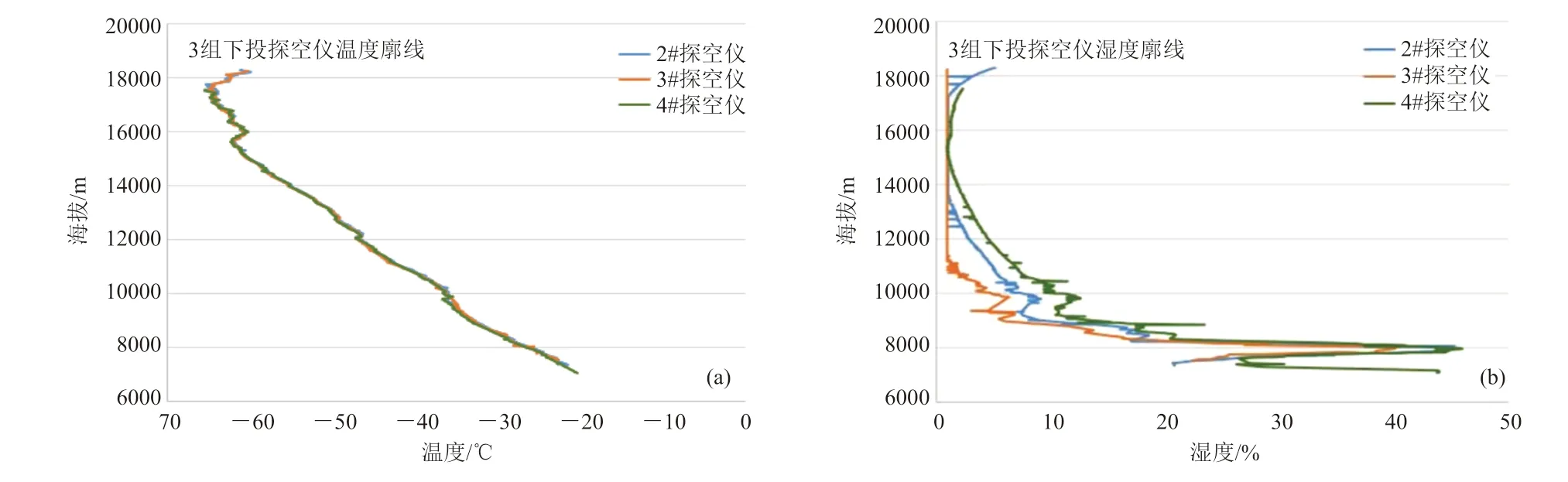
图5 白天释放的3组探空仪温度(a)、湿度(b)廓线比对Fig. 5 Comparison of three sets of dropsonde’s temperature (a) and humidity (b) profiles during the day time
由图5可见,温度和湿度廓线趋势较为一致。为了进一步研究下投探空仪所测廓线的可靠性,以2号探空仪为参考标准,3号和4号探空仪与之做差对比,比较分析白天3组数据各海拔层(500 m间隔)的要素。
由图6a~6e可见,白天释放的3组探空仪温度差值保持在±0.4 ℃以内,说明下投探空仪所测温度廓线一致性较好。3号与2号差值较小,4号与2号差值更大,由于4号降速较大(表2),造成一致性偏差大;湿度差值保持在±4%以内,说明下投探空仪所测湿度廓线一致性较好;气压差值保持在1.5 hPa以内,说明下投探空仪所测湿度廓线一致性很好,而4号比2号的气压差值偏大,是由于4号降速偏大造成的,说明降速对气压的测量有一定的影响;风速差值保持在±2 m/s以内,说明下投探空仪所测风速廓线一致性很好;风向差值保持在±4°以内,说明下投探空仪所测风向廓线一致性较好。
综上所述,由下投探空仪观测数据分析可见,利用平流层飞艇搭载、地面远程操控释放下投式探空仪,地面场站雷达接收获得的探空观测秒数据质量稳定可靠,证明飞艇是一种可连续工作时间长、机动性强、平台稳定的下投式探空的平流层搭载平台。
2.2 艇载温度观测
为了探索揭示太阳反射涂层、安装位置和热流场对温度测量结果的影响,在载荷舱体下方分别布设了2支热电偶传感器(距离飞艇底部1 m和2 m)、2支铂电阻传感器(距离飞艇底部20 cm)、2组阵列式热敏电阻温度传感器(距离飞艇底部6 cm),其中1组热敏电阻表面无太阳反射涂层、1组热敏电阻表面有太阳反射涂层,每组均由5支热敏电阻构成,安装位置相同,1号位置朝向艇头,2号和3号位置在艇左侧,4号和5号位置在艇的右侧,1~5号位置间隔72°平均分布。
1)热电偶温度传感器观测数据分析
考虑到热电偶温度传感器体积小、受太阳辐射影响小,但在飞艇上升过程中易损坏,故安装在飞艇载荷舱中,上升至预定高度后(00:35)从气象载荷舱中抛出(位置如图3a),悬挂在距离舱底1 m和2 m的位置。由于飞艇在白天进行观测时处于太阳辐射的环境中,因此在飞行过程中会产生热尾流,这种热尾流对大气温度测量的准确度有显著影响。
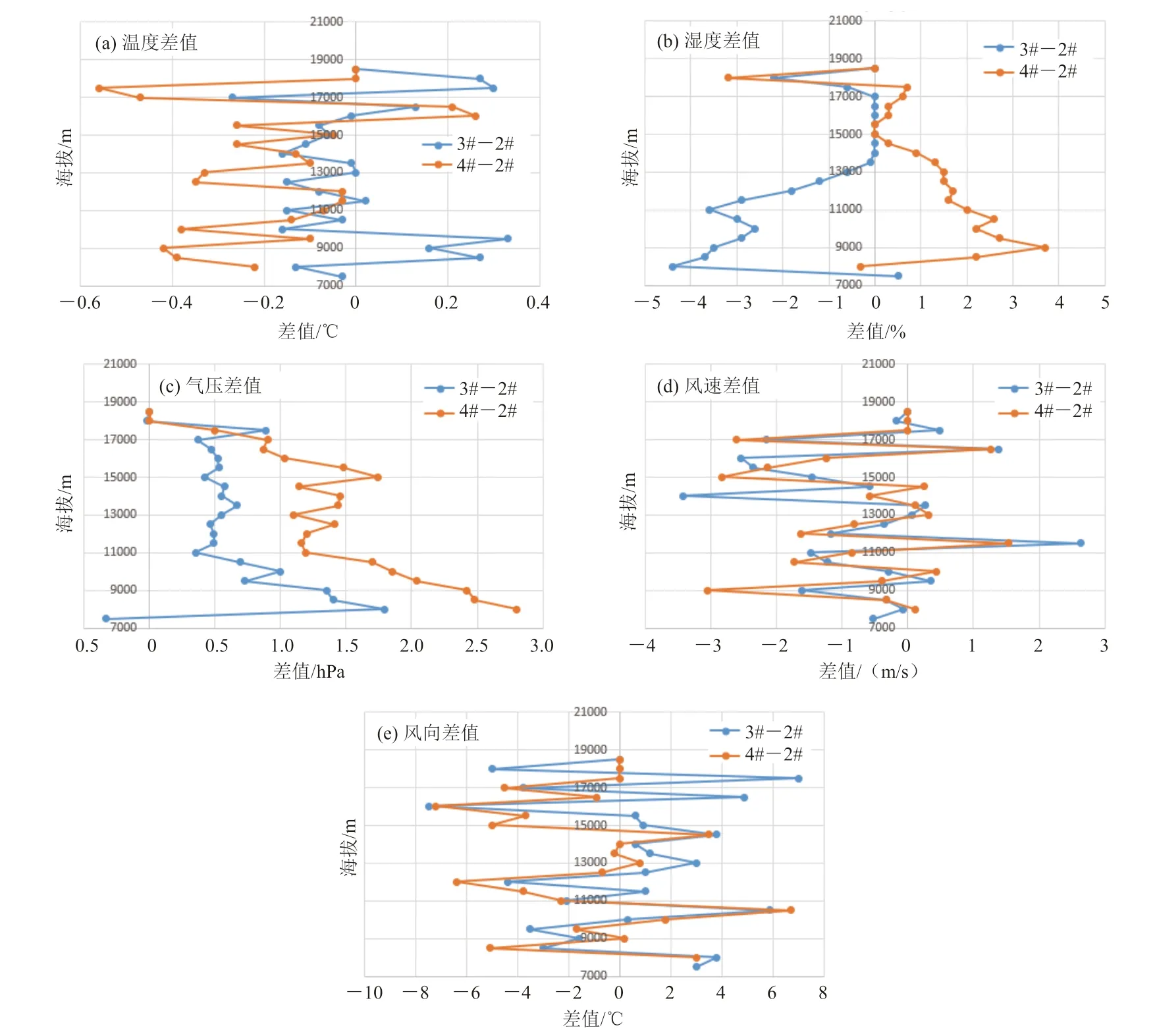
图6 白天释放的3组探空仪温(a)、湿(b)、压(c)、风(d、e)要素差值Fig. 6 Difference of three sets of dropsonde’s temperature (a), humidity (b), pressure (c), wind speed (d), and direction (e)profiles during the day time
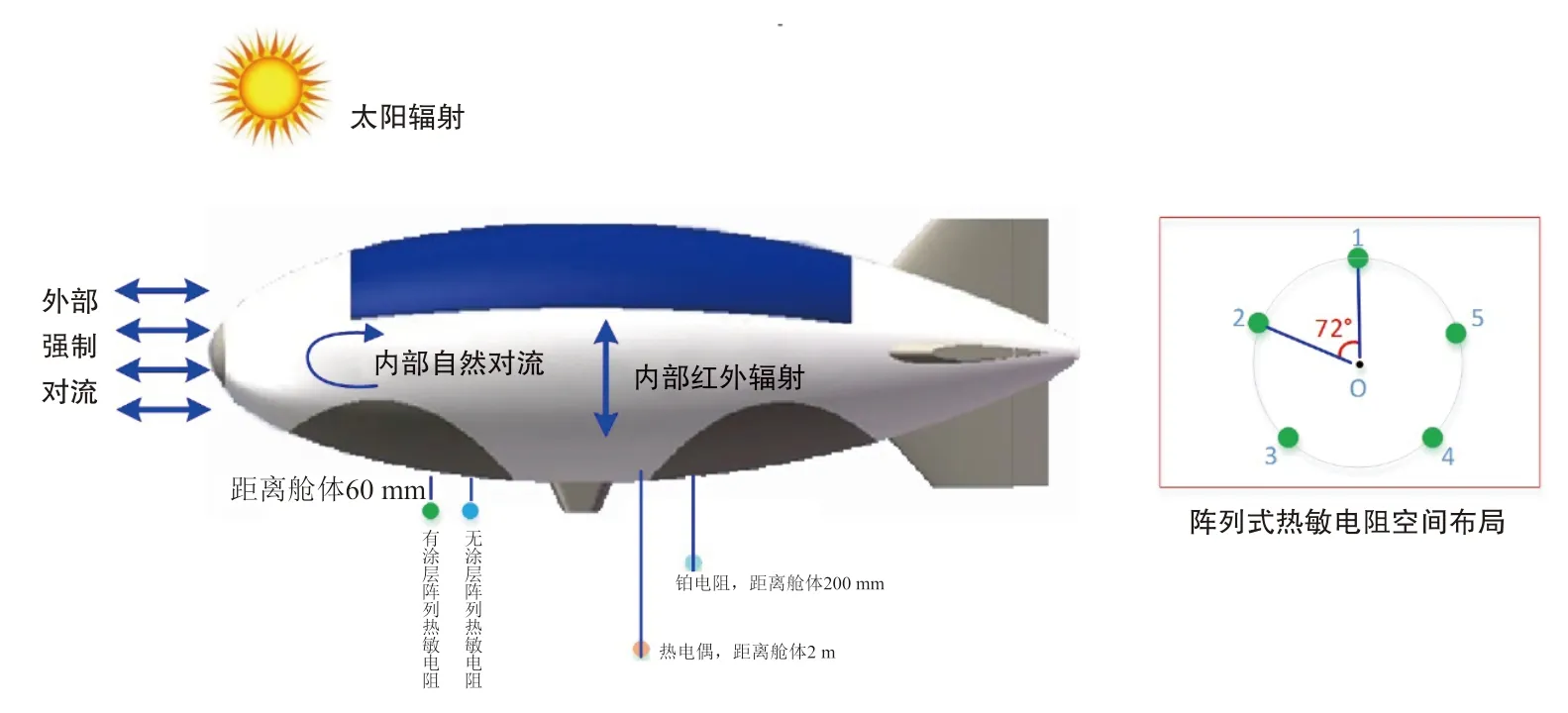
图7 飞艇中阵列式热敏电阻的空间布局示意图Fig. 7 schematic diagram of space layout of array thermistors in airship
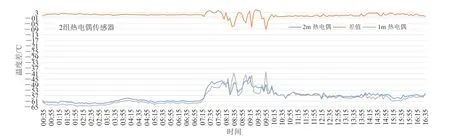
图8 两支热电偶温度传感器观测数据对比Fig. 8 Comparison of two thermocouple temperature observation data
由图8可见,在日出(07:20)前,飞艇动力系统处于关闭状态,2支热电偶传感器之间的温度差稳定在1~2 ℃,这种温度差主要是来自于悬挂位置差异。日出后,在飞艇全速运动阶段(07:20—10:20),1 m位置的热电偶温度最高升高了近20 ℃,两者之间的最大温度差接近10 ℃,这种温度差一方面是受到太阳辐射影响,而更主要原因,推断是受到飞艇动力装置带来的尾流加热影响,且距离飞艇越近受飞艇尾流加热影响越大;在飞艇低速运动阶段(10:20—16:45),飞艇动力系统尾流加热影响减弱,两者之间的温度差又变得较为稳定,基本在2 ℃以内。
2)铂电阻温度传感器观测数据分析
2支铂电阻传感器均布设在距离飞艇底部20 cm位置,随飞艇上升至平流层。
由图9可见,在日出(07:20)前,2支铂电阻温度传感器之间的温度基本稳定在0.2 ℃以内,体现了非常好的测量一致性,只是在初期飞艇高度调整和释放下投探空阶段波动幅度较大。日出后,与热电偶传感器情况相似,2支铂电阻传感器之间的温度差逐渐变大,在飞艇全速运动阶段(07:20—10:20),两者之间的最大温差接近3 ℃,推断是受到太阳辐射和飞艇动力系统运转带来的热尾流的共同影响;在飞艇低速运动阶段(10:20—16:45),两者之间的温度差也恢复到1 ℃以内。
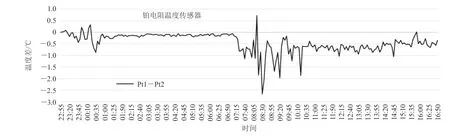
图9 两支铂电阻温度观测数据对比Fig. 9 Comparison of two platinum resistance temperature observation data
3)阵列式热敏电阻温度传感器观测数据分析
由图10和图11可见,如果以热电偶(2 m)温度传感器测量数据作为参考标准,在日出(07:20)前,受飞艇红外辐射影响,热敏电阻测量温度高于热电偶测量温度,有辐射涂层阵列热敏电阻的温度波动性明显小于无辐射涂层阵列热敏电阻。日出后,在飞艇全速运动阶段(07:20—10:20),受到太阳辐射、飞艇内部红外辐射和飞艇尾流的共同影响,无论热敏电阻是否有涂层,测量值都出现剧烈变化,比热电偶温度最多低接近12 ℃;在飞艇低速运动阶段(10:20—16:45),飞艇尾流对热电偶加热影响减弱,热敏电阻受飞艇内部红外辐射和太阳辐射影响增强,热敏电阻比热电偶温度最多高接近10 ℃。
由图12可见,以无涂层传感器与有涂层传感器观测结果做差,在1、2和3号位置有无涂层传感器差异情况接近,在4号和5号位置有无涂层传感器差异情况接近。日出前,各位置上有无涂层热敏电阻传感器的差异小,主要是受大气长波辐射和艇体红外辐射影响、未受到太阳辐射影响;日出后,在4号和5号位置上,无涂层传感器测量温度高于有涂层传感器,受太阳辐射的影响,而在1、2、3号位置上,无涂层传感器测量温度高于有涂层传感器,推断是因为传感器距离艇身较近,存在阴影遮挡减小了太阳辐射的影响。
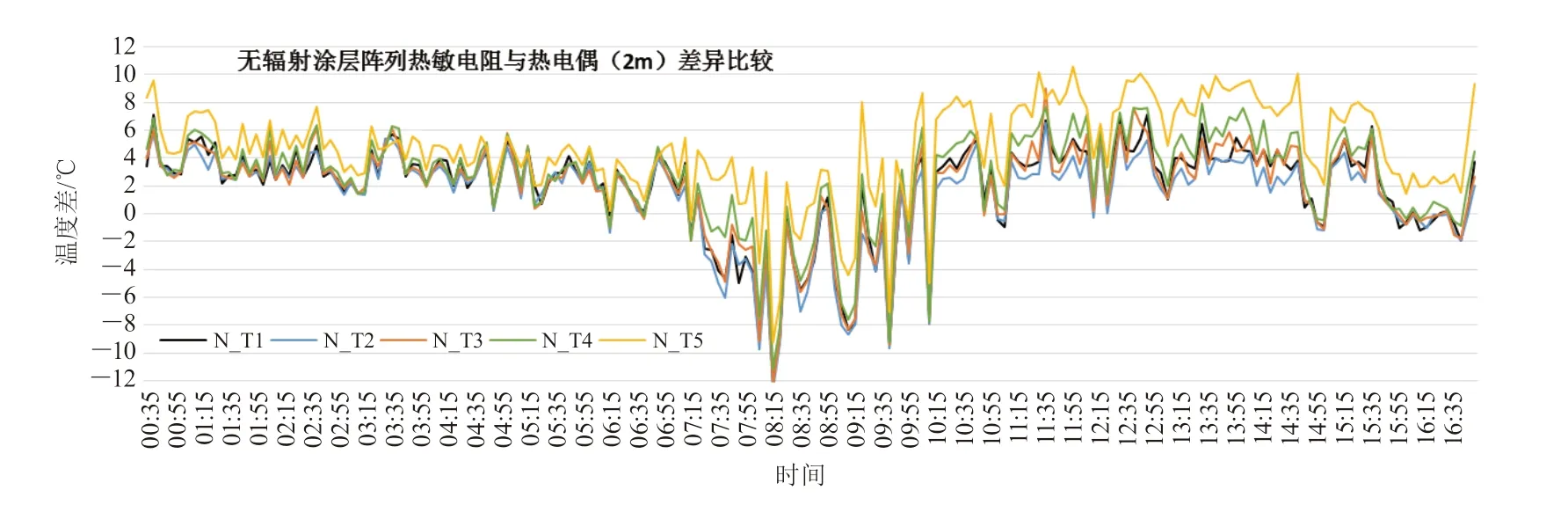
图10 无辐射涂层阵列热敏电阻与热电偶传感器(2 m)比较Fig. 10 Comparison of radiation-free coated array thermistors with thermocouple sensors (2 m)
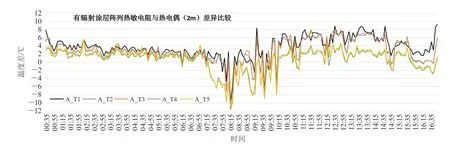
图11 有辐射涂层阵列热敏电阻与热电偶传感器(2 m)比较Fig. 11 Comparison of radiation-coated array thermistor with thermocouple sensors (2 m)
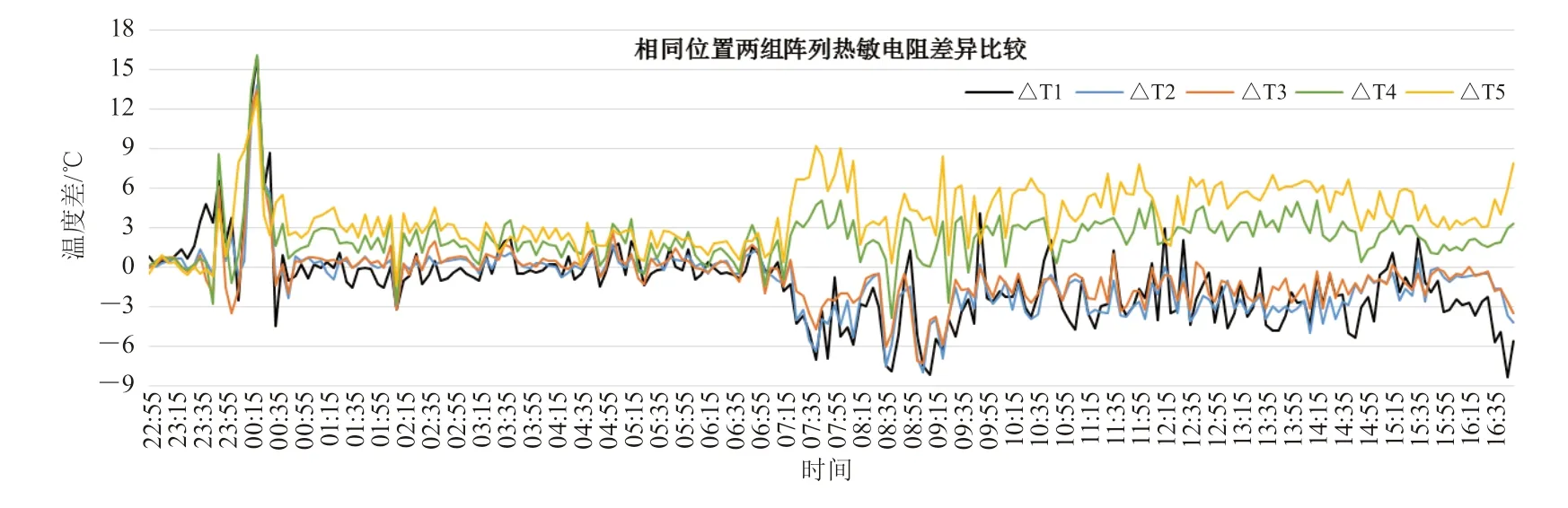
图12 相同位置两组阵列热敏电阻传感器比较Fig. 12 Comparison of two array thermistor sensors in the same position
4)大气温度观测布局优化方案
由上述分析可见,受飞艇尾流加热影响程度:热电偶(1 m)>热电偶(2 m)>铂电阻(20 cm)>热敏电阻(6 cm),飞艇的热尾流主要影响区域在距离飞艇底部1 m左右的位置,飞艇的内部红外辐射影响程度,则是距离艇体越远越小,距离艇身太近还会存在一定的阴影遮挡。为了减小太阳辐射和飞艇热尾流对大气温度观测结果的影响,优化温度传感器安装在飞艇周围的布局,可选用热电偶传感器,在飞艇的头部、尾部和两侧分别距离艇体至少2 m分别安装(如图13所示),因为太阳辐射和热尾流都是增温影响,因此同一个观测时间里的最低温度传感器观测数据即可视为大气温度的相对真值。另外,结合计算流体学方法提出的辐射误差修正算法,有望将热电偶组温度传感器的辐射误差修正精度提高到0.05 ℃量级。
3 初步结论与展望
通过本次平流层飞艇气象观测试验数据分析,可以得出以下初步结论:
1)基于飞艇平台的下投导航探空仪方式可行,观测数据稳定、可靠,未来飞艇平台观测技术更加趋于成熟稳定,可以成为台风等大尺度灾害性天气观测的一种新手段.
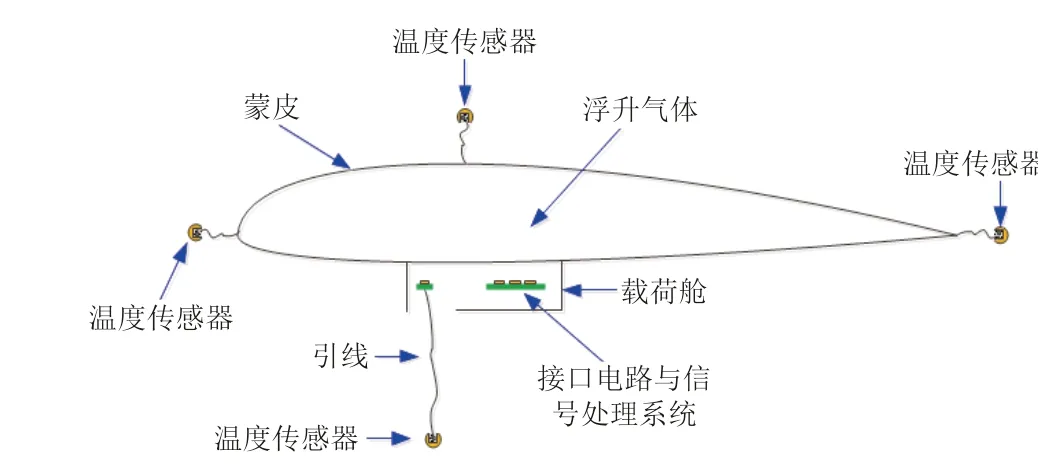
图13 飞艇上热电偶组温度传感器的优化布局示意图Fig. 13 Schematic diagram of optimal layout of thermocouple group temperature sensors on airship
2)平流层飞艇在平流层空间开展气象观测,必须考虑太阳辐射、艇体内部红外辐射、飞艇动力系统产生的尾流等对气象要素观测的影响,通过合理优化的观测布局设计和误差修正算法设计,减小环境因素对观测结果的影响。