基于Visual C#的交叉口可变车道连续仿真研究
2019-10-15曾铖泓郭建钢徐锦强连培昆
徐 海 曾铖泓 郭建钢 徐锦强 连培昆
(福建农林大学交通与土木工程学院,福建 福州 350002)
2018年度,由高德地图联合中国社会科学院社会学研究所、阿里云、华南理工大学林永杰团队等权威机构和团队,发布了《2018年度中国主要城市交通分析报告》。[1]报告指出,在许多大城市中,由于居住区和工作区分布不均衡,城市干道常常出现潮汐式的交通现象,造成城市道路资源不均衡利用的问题。国内外实践经验表明:实施可变车道,调整道路时空资源是解决潮汐交通现象、缓解城市交通拥堵的最有效措施之一。将轻交通流方向的道路资源调节给重交通流方向,能在一定程度上减缓重交通流方向的交通压力,提高整个道路网络系统的运行效率。[2]
VISSIM交通仿真软件是研究可变车道的常用工具,但是软件存在以下几点不足:(1)仿真复杂交通行为需要进行二次编程;(2)许多输出指标无法直接可视化;(3)对于可变车道类型的仿真不够精确。因此,近年来国内外对于可变车道控制技术都进行了大量的研究,基于一维元胞自动控制机模型,应用MATLAB对设置可变车道交叉口进行运行效果分析;[3]以MATLAB的GUI平台为基础,利用VISSIM仿真数据开发可变车道设置系统,使可变车道延误时间可视化;[4]利用可变车道饱和度分析道路交通运行状况,划分不同交通状态并建立各个状态下车道行驶方向优化模型。[5]但是,目前研究成果多集中于车道功能切换、信号方案优化等方面,[6]欠缺对可变车道连续仿真的研究。
为了解决在VISSIM交通仿真软件中无法进行可变车道连续仿真的问题,本文基于Visual C#,通过for循环的编程方法,在一个单步仿真过程中设置仿真“断点”,实现多方案连续仿真。
1 可变车道介绍
道路交通运行过程中,交通流量呈波动变化。在某个时间段里,某些流向会出现交通流量高峰,从而导致道路交通资源分配不均衡的问题,形成排队现象。因此,为缓解拥堵压力,在高峰时段使用动态车道,[7]该车道车道功能能够在不同时段变化,以适应交通流潮汐性的特点。
可变车道,又称“潮汐车道”,是指在不同的时间内变化某些车道上的行车方向或行车种类的一种交通组织方式,其特点:(1)双向通行能力不均衡;(2)随着早晚高峰而变;(3)可根据早晚潮汐交通流量设置车道可变的数量。[8]
可变车道按适用对象可分为两类:行驶方向可变车道和导向式可变车道。在不同时间内变换某些车道上行车方向的称为行驶方向可变车道,它可缓和车流量方向分布不均匀现象;在不同时间内变化交叉口某些进口道车道功能的称为导向式可变车道,它可缓和各种类型交通的时空分布不均匀性的矛盾,提高道路资源利用率。本文主要针对交叉口导向式可变车道的连续仿真问题进行研究。
2 现有可变车道仿真方法及不足
目前国内外交通仿真大部分采用的是VISSIM软件,一种微观的、基于时间间隔和驾驶行为的仿真建模工具。当前可变车道的案例分析和工程实践方面的研究,一般先借助VISSIM仿真软件进行模拟仿真,再对比分析可变车道设置前后道路交通运行效果。
传统采用分阶独立仿真方法。首先,仿真现状交叉口交通状况,得到现状交叉口延误。其次,改变路径选择,在现状交叉口基础上,加入可变车道放行方案,仿真得到可变车道延误。最后,对比两次仿真得到的延误,判断实行可变车道方案后交叉口延误是否降低。
但是,这种方法存在局限性。传统分阶段仿真忽略了上一个周期滞留的车辆,因此经过仿真得到的延误误差较大。
3 可变车道连续仿真
3.1 车道方案的仿真模型
为了弥补传统仿真方法的局限,需要加入不同的放行方案,进行过渡和连续仿真,并在此基础上进行延误对比分析。相比传统分阶段仿真,连续仿真具有“糅合”的特点。实际可变车道应用调查发现,无论是交叉口导向式可变车道,还是行驶方向可变车道,都采用定时式控制方法。因此,在可变车道仿真中,需要在一个仿真过程依次进行“现状放行方案-可变车道放行方案-现状放行方案”。通过这种仿真方法得到的延误数据与现状实施可变车道的实际延误进行对比,判断可变车道是否能缓解交通压力。交叉口现状和可变车道方案的仿真模型见图1。

图1 现状车道方案和可变车道方案的仿真模型
3.2 连续仿真流程
使 用Visual Studio 2017接 入VISSIM_COMSERVERLib接口,采用C#编写可变车道连续仿真程序。具体仿真流程见图2。
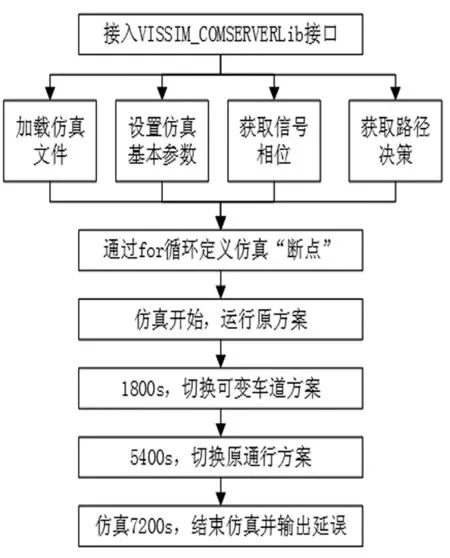
图2 连续仿真流程
基本编程指令见表1。
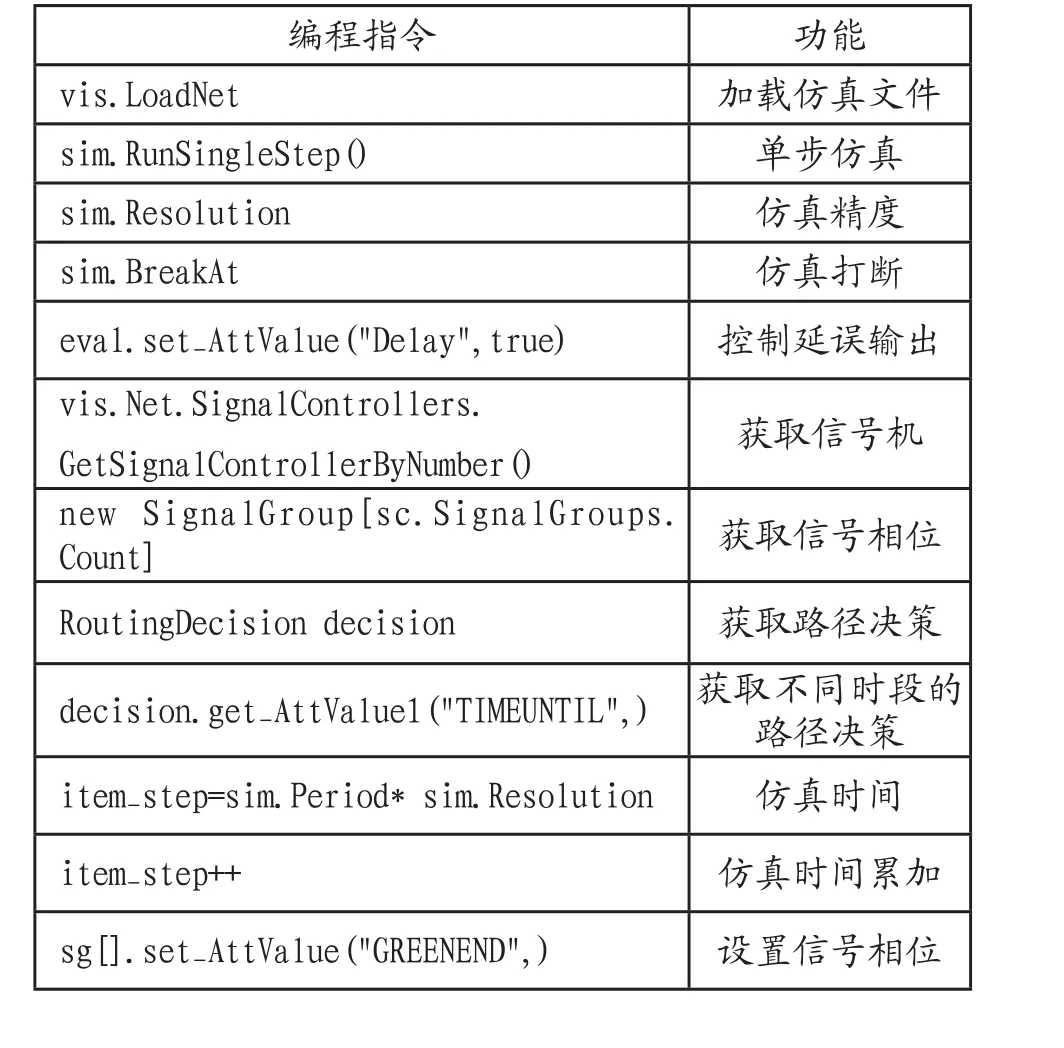
表1 基本编程指令表
3.3 连续仿真程序
“断点”程序,指在一个单步仿真中插入断点,执行其他仿真命令,却不影响单步仿真正常运行。“断点”程序以for循环为载体。本文将可变车道的起止仿真时间插入一个单步仿真中。当仿真时间到达可变车道开始时刻,执行可变车道方案;当仿真时间到达可变车道终止时刻,切换回原通行方案。仿真数据获取程序见图3,for循环程序示例见图4,可变车道方案程序见图5。
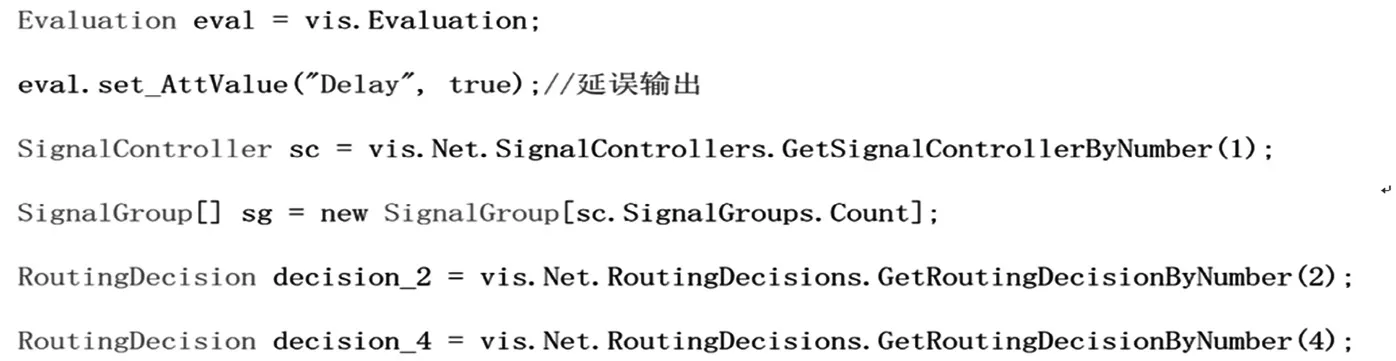
图3 仿真数据获取
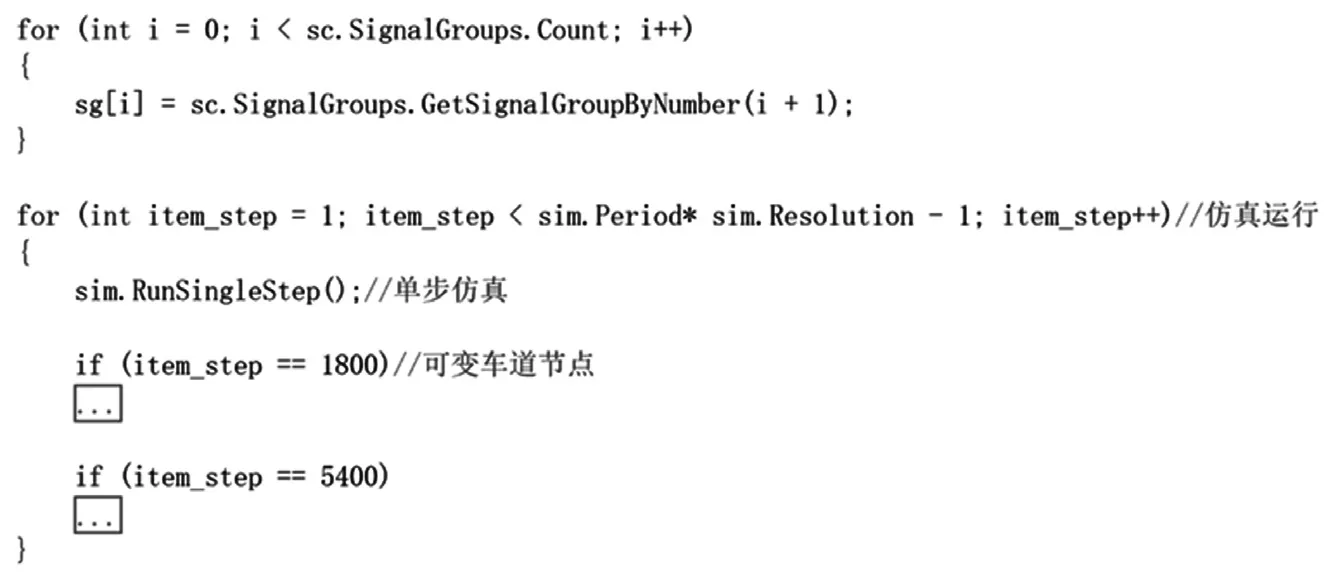
图4 for循环程序
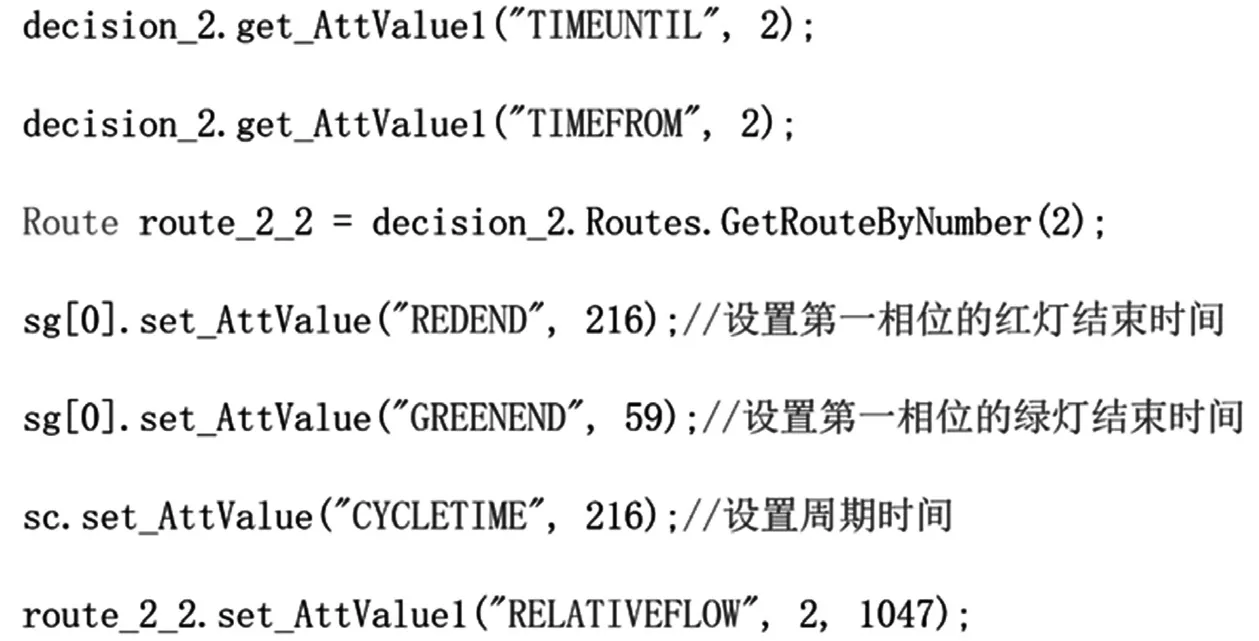
图5 可变车道方案程序示例
4 案例分析
以福州五四华林路交叉口作为案例分析。交叉口各个进口道均为双向直行、双向左转和一条右转专用道。南北进口道与直行车道相邻的一条左转车道为可变车道。现状交叉口的车道划分方案见图6。

图6 现状交叉口的车道划分方案
4.1 基础数据
选取交叉口17:00-19:00时段进行流量调查,其中17:30-18:30为晚高峰。交叉口交通量数据见表2。

表2 交叉口交通量数据(pcu/h)
4.2 信号配时
基本饱和流量是配时计算的重要参数,参照【GB50647-2011城市道路交叉口规划规范】,直行车道取1700 pcu/h/车道,左转车道取1400 pcu/h/车道。采用Webster法进行信号配时,最大流量比为0.894,启动损失时间取3s,黄灯时间3s,全红时间3s,信号总损失时间12s,最佳周期216s。可变车道信号相位配时方案见图7。

图7 可变车道信号相位配时方案
4.3 运行仿真
利用vissim软件,构建交叉口路网模型,并进行仿真,仿真运行状态如图8。

图8 交叉口可变车道车流运行仿真图
(1) 传统仿真方法
准备两个仿真路网,一个为原方案,另一个为可变车道方案。原方案进行仿真两次,每次仿真1800s。可变车道方案仿真一次,3600 s。得到三次仿真延误数据,按照1800+3600+1800秒组成延误数据表,仿真间隔为300秒。
(2) 连续仿真方法
准备一个仿真路网,在原方案基础上,南北进口道各添加一条路径选择,作为可变车道方案。运行程序,打开仿真文件,仿真7200s,输出延误数据。
4.4 结果分析
为了检验两种仿真方法的仿真精度,对交叉口延误进行了实地调查,并与两种仿真方法进行对比。实地延误调查选取17:00-19:00作为调查时段,其中晚高峰17:30-18:30。实地调查间隔为300s,与仿真中延误数据输出间隔保持一致。两种仿真方法的延误及实测延误数据见表3,变化曲线见图9。

表3 两种仿真方法的延误及实测延误数据(s)

图9 仿真延误和实测延误曲线
经过数据对比和分析,实测可变车道交叉口平均延误96s,连续仿真方法延误93.1s,传统仿真方法延误102.7s。传统仿真方法误差为6.98%,连续仿真方法误差3.02%,仿真误差降低3.96%。
5 结语
本文在VISSIM仿真软件的基础上,使用Vsiual C#对可变车道连续仿真进行二次开发,设计了一种能在一次仿真过程中实现可变车道连续仿真的程序。延误数据分析发现,与实测可变车道延误对比,相比传统仿真方法延误误差6.98%,连续可变车道仿真方法的延误误差为3.02%,误差降低了3.96%。连续可变车道仿真方法的仿真精度更高,对可变车道的研究具有重要意义。基于VISSIM仿真软件的二次开发,还可以进行其他仿真优化,例如逆向可变车道仿真研究等。
