四轮独立驱动电动汽车性能仿真方法研究
2019-10-14赵华慧黄兆飞杨镇瑜
赵华慧 黄兆飞 杨镇瑜
摘 要:四轮独立驱动电动汽车由于其布局灵活、动力独立可控,成为未来电动汽车的主要发展方向,而对整车性能进行仿真分析可以有效地缩短研发时间和成本。本文首先建立了四轮独立驱动电动汽车的动力学模型,然后根据动力学模型,采用CRUISE和MATLAB分别建立了整车动力性能的仿真模型。仿真试验结果表明,CRUIE建立仿真模型简单方便,但只能分析直线行驶工况;MATLAB可以模拟分析汽车的各種行驶工况,但其仿真结果的准确性取决于动力学模型的准确程度。
关键词:四轮独立驱动;性能仿真;MATLAB;CRUISE
1 前言
节能与环保是21世纪的发展主题,而对于汽车行业来说,纯电动汽车完全符合节能与环保这一发展要求,成为未来汽车的一个主要发展方向。四轮独立驱动电动汽车作为纯电动汽车中的一种,因其动力独立可控,便于实现差速控制、原地转向等功能,成为时下汽车行业的一个研发重点[1]。
仿真技术的出现,使得汽车产品的研发成本和周期得到了大大的降低,而且随着科学技术的不断进步,汽车行业常用的仿真软件的仿真结果和实际误差越来越小,使得仿真分析已经成为汽车研发过程中必不可少的一个阶段。对于四轮独立驱动电动汽车的研发可以追溯到1898年,但是,经过这一百多年的发展,只有极少部分国家有成熟的四轮独立驱动电动汽车车型上市,绝大部分国家的四轮独立驱动电动汽车还处于概念车的阶段[2]。国内各大高校也致力于四轮独立驱动电动车的研发,但都把研发重点放在了驱动力分配、电子差速控制以及驱动防滑控制等方面[2-4],却没有一家机构建立一款行业通用的四轮独立驱动电动汽车仿真模型。
因此,本文以一款四轮独立驱动电动汽车为研究对象,首先建立该款电动汽车的动力学模型,然后根据动力学模型,采用行业内常用的CRUISE和MATLAB两款软件分别建立整车动力性能的仿真模型并进行仿真分析,对比两款软件建立的仿真模型的优劣, 为四轮独立驱动电动汽车的发展提供一定的理论支撑。
2 四轮独立驱动电动汽车动力学模型
汽车的行驶系统是一个十分复杂的系统,为了便于仿真模型的建立,本文对一些次要因素进行简化,只建立关键部件的动力学模型。
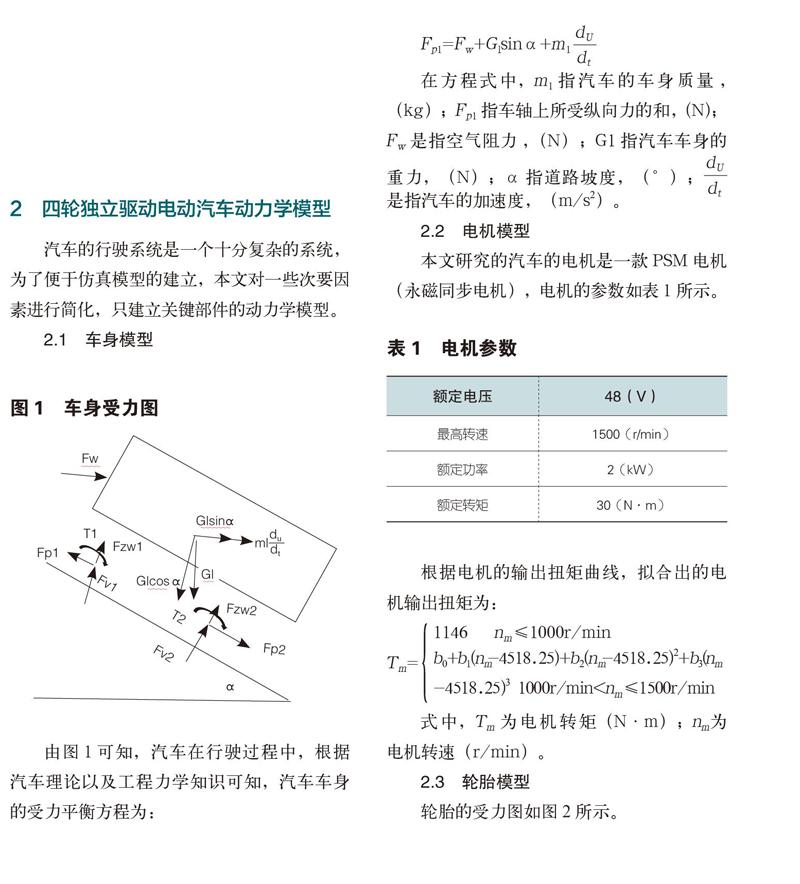
2.1 车身模型
由图1可知,汽车在行驶过程中,根据汽车理论以及工程力学知识可知,汽车车身的受力平衡方程为:
在方程式中,m1指汽车的车身质量,(kg);Fp1指车轴上所受纵向力的和,(N);Fw是指空气阻力,(N);G1指汽车车身的重力,(N);α指道路坡度,(°);是指汽车的加速度,(m/s2)。
2.2 电机模型
本文研究的汽车的电机是一款PSM电机(永磁同步电机),电机的参数如表1所示。
根据电机的输出扭矩曲线,拟合出的电机输出扭矩为:
式中,Tm为电机转矩(N·m);nm为电机转速(r/min)。
2.3 轮胎模型
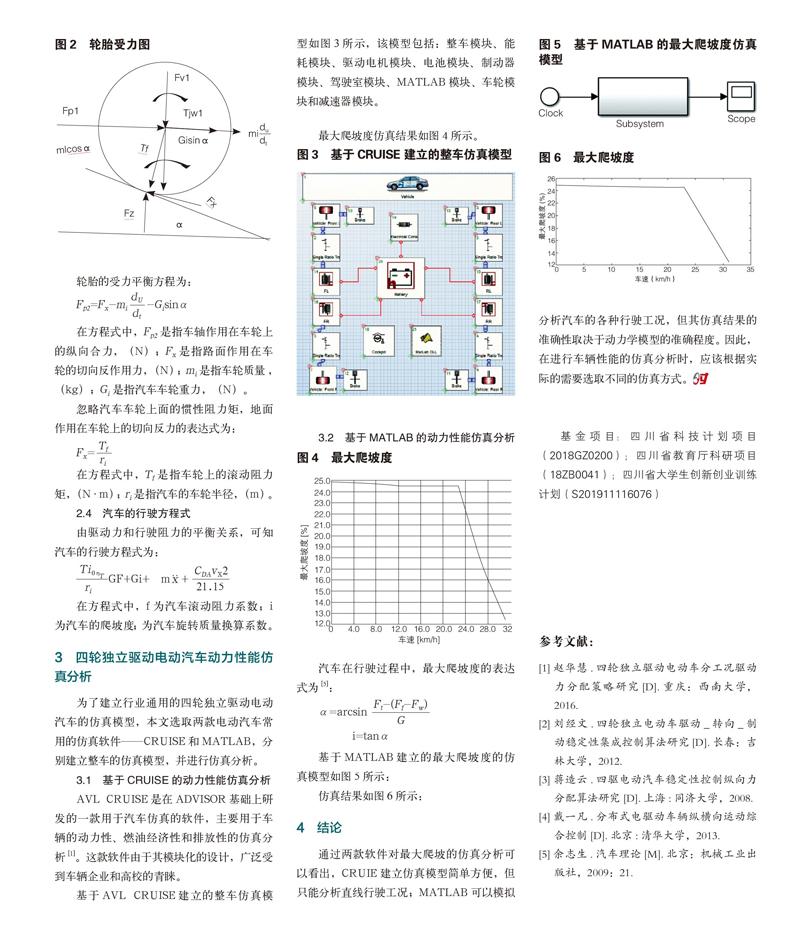
轮胎的受力图如图2所示。
轮胎的受力平衡方程为:
在方程式中,Fp2是指车轴作用在车轮上的纵向合力,(N);Fx是指路面作用在车轮的切向反作用力,(N);mi是指车轮质量,(kg);Gi是指汽车车轮重力,(N)。
忽略汽车车轮上面的惯性阻力矩,地面作用在车轮上的切向反力的表达式为:
在方程式中,Tf是指车轮上的滚动阻力矩,(N·m);ri是指汽车的车轮半径,(m)。
2.4 汽车的行驶方程式
由驱动力和行驶阻力的平衡关系,可知汽车的行驶方程式为:
在方程式中,f为汽车滚动阻力系数;i为汽车的爬坡度;为汽车旋转质量换算系数。
3 四轮独立驱动电动汽车动力性能仿真分析
为了建立行业通用的四轮独立驱动电动汽车的仿真模型,本文选取两款电动汽车常用的仿真软件——CRUISE和MATLAB,分别建立整车的仿真模型,并进行仿真分析。
3.1 基于CRUISE的动力性能仿真分析
AVL CRUISE是在ADVISOR基础上研发的一款用于汽车仿真的软件,主要用于车辆的动力性、燃油经济性和排放性的仿真分析[1]。这款软件由于其模块化的设计,广泛受到车辆企业和高校的青睐。
基于AVL CRUISE建立的整车仿真模型如图3所示,该模型包括:整车模块、能耗模块、驱动电机模块、电池模块、制动器模块、驾驶室模块、MATLAB模块、车轮模块和减速器模块。
最大爬坡度仿真结果如图4所示。
3.2 基于MATLAB的动力性能仿真分析
汽车在行驶过程中,最大爬坡度的表达式为[5]:
基于MATLAB建立的最大爬坡度的仿真模型如图5所示:
仿真结果如图6所示:
4 结论
通过两款软件对最大爬坡的仿真分析可以看出,CRUIE建立仿真模型简单方便,但只能分析直线行驶工况;MATLAB可以模拟分析汽车的各种行驶工况,但其仿真结果的准确性取决于动力学模型的准确程度。因此,在进行车辆性能的仿真分析时,应该根据实际的需要选取不同的仿真方式。
基金项目:四川省科技计划项目(2018GZ0200);四川省教育厅科研项目(18ZB0041);四川省大学生创新创业训练计划(S201911116076)
参考文献:
[1]赵华慧.四轮独立驱动电动车分工况驱动力分配策略研究[D].重庆:西南大学,2016.
[2]刘经文.四轮独立电动车驱动_转向_制动稳定性集成控制算法研究[D].长春:吉林大学,2012.
[3]蒋造云.四驱电动汽车稳定性控制纵向力分配算法研究[D].上海:同济大学,2008.
[4]戴一凡.分布式电驱动车辆纵横向运动综合控制[D].北京:清华大学,2013.
[5]余志生.汽车理论[M].北京:机械工业出版社,2009:21.
