麋鹿测试驾驶场景下智能驾驶机器人的应用
2019-10-14郑继虎徐发达张苏林徐树杰张庆余
郑继虎 徐发达 张苏林 徐树杰 张庆余


摘 要:伴随着智能网联汽车的快速发展,汽车的主动安全性能越来越受到关注。麋鹿测试是针对汽车转向、底盘、悬挂三大硬件系统和ESP功能的高速高危测试试验,用于检验汽车在高速行进场景下完成S转向的主动安全性能。本文首先对麋鹿测试ISO标准规范进行解读,并论证了智能驾驶机器人替代驾驶员完成测试以保障测试过程中人身安全的可行性,并通过实验验证了智能驾驶机器人在麋鹿测试中的可靠性。
关键词:麋鹿测试(Moose test);智能驾驶机器人;路径规划
1 引言
“中国制造2025”将汽车产业列为十大关键领域之一,其中智能网联汽车作为行业发展两大主题之一备受关注[1],在国家政策的支持和行业机构的参与下,智能网联汽车产业快速发展。中国汽车技术研究中心已将车辆的主动安全纳入到中国新车评价规程(C-NCAP)测试评价体系中,以汽车AEB功能测试为例,在测试过程中如何保障测试人员安全、保证车辆航向角度和车辆速度精确性的问题亟待解决[2]。
中国汽车技术研究中心自主研发的智能驾驶机器人,通过模拟人类驾驶员踩踏板、打转向和换档位的动作,设计了一种可控制车辆完成转向、速度和档位控制的机械结构,能够在不对车辆进行任何改装的前提下替代驾驶员进行可靠性、危险性和高精度的车辆道路试验。
2 麋鹿测试
ISO 3888-2:2002规定了一种汽车在高速场景下进行紧急避障的麋鹿测试,在测试过程中对速度的控制精度要求高,并存在爆胎、失控甚至翻车的安全威胁[3]。麋鹿测试(Moose test)中“Moose”是指瑞典特有的驼鹿,驼鹿习惯高速横穿公路,由于其四肢高于乘用车前端高度,但成年驼鹿的体重在300-500kg,雄性驼鹿还有巨大的坚硬鹿角。一旦与高速行驶的车辆碰撞,驼鹿纤细的四肢会被撞断,整个身体由于惯性拍向前挡风玻璃,并且安全气囊顺利弹出概率很小,极易造成伤亡事故。
2.1 麋鹿测试的原因
图1为驼鹿与车辆高度的对比示意图,其中红色虚线表明成年驼鹿四肢高度与SUV车型前端高度基本相等。图2对驼鹿横穿马路与车辆碰撞进行了图示说明,由图2可知在汽车前进方向上发生碰撞,该方向上动量守恒,具体计算说明如下:
根据动量守恒可得:
碰撞时间近似等于汽车以碰撞前速度行进驼鹿肢体宽度的距离所需时间,即:
将,,带入上述两式,计算可得碰撞瞬间冲击力为:
由此可知,在汽车与驼鹿碰撞的瞬间会产生巨大的冲击力,前挡风玻璃和車辆A柱无法承受如此巨大的冲击,严重威胁驾驶员的生命安全。
据不完全统计,在瑞典每年至少每公里发生一次驼鹿撞车事故,每年超过2000头驼鹿死于交通事故[4],事故中车辆安全气囊无法正常弹出、前挡风玻璃无法承受驼鹿巨大体重的冲击等问题使得车辆的被动安全配置无用武之地,因此只能要求对车辆的主动安全性能进行优化和完善,尤其是在紧急情况下车辆的避障和避障后航向纠正的能力。
2.2 麋鹿测试的规范
麋鹿测试在ISO标准中名称为Passenger cars-Test track for a severe lane-change manoeuvre-Part 2:Obstacle avoidance,属于国际标准ISO 3888内容之一,该标准针对车辆的动态性能和抓地能力的进行了规范和要求。
2.2.1 标准测试场地要求
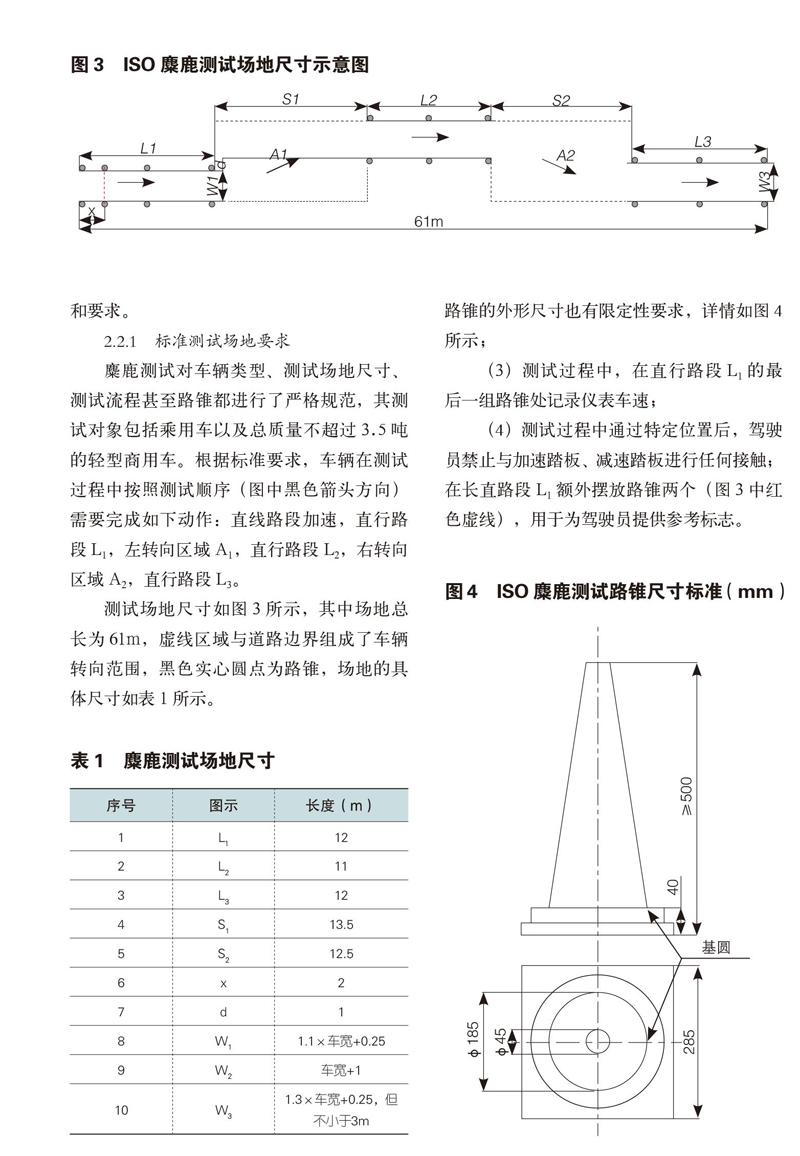
麋鹿测试对车辆类型、测试场地尺寸、测试流程甚至路锥都进行了严格规范,其测试对象包括乘用车以及总质量不超过3.5吨的轻型商用车。根据标准要求,车辆在测试过程中按照测试顺序(图中黑色箭头方向)需要完成如下动作:直线路段加速,直行路段L1,左转向区域A1,直行路段L2,右转向区域A2,直行路段L3。
测试场地尺寸如图3所示,其中场地总长为61m,虚线区域与道路边界组成了车辆转向范围,黑色实心圆点为路锥,场地的具体尺寸如表1所示。
其中,标准中对特定位置和特殊尺寸进行了强调:
(1)测试开始前,首先测量车辆宽度,标准中要求的车宽不包括车辆两侧后视镜宽度;
(2)路锥摆放要求为每段长直路段起点中点终点各一个,摆放时路锥基圆必须与道路边界外切以保证场地尺寸的准确性,另外路锥的外形尺寸也有限定性要求,详情如图4所示;
(3)测试过程中,在直行路段L1的最后一组路锥处记录仪表车速;
(4)测试过程中通过特定位置后,驾驶员禁止与加速踏板、减速踏板进行任何接触;在长直路段L1额外摆放路锥两个(图3中红色虚线),用于为驾驶员提供参考标志。
2.2.2 测试流程要求
根据ISO标准要求,麋鹿测试步骤如下:
(1)按照场地尺寸要求完成区域规划和路锥摆放,测试车辆乘客满载并在后备箱配备相应负重以达到车辆的客货满载状态;
(2)启动车辆,在进入直行路段L1时保证车辆发动机转速不低于2000r/min;
(3)通过直行路段L1的虚线位置时,松开加速踏板,在完成测试前不进行任何踏板操作;
(4)在测试过程中,严禁车辆与任意路锥有任何接触,若满足此条件则该速度下麋鹿测试通过,反之,则再次进行试验;
(5)在车辆性能允许的前提下,不断的提高车辆速度,重复测试步骤(1)(2)(3)(4)直至达到车辆可完成测试的最大速度;
(6)达到测试最大速度后,记录下测试车辆仪表盘速度,再次以该速度进行两次测试以保证测试结果的有效性。
3 智能驾驶机器人场景应用
通过第二章对麋鹿测试标准的分析可知,麋鹿测试存在着以下几个问题亟待解决,具体如下:
(1)车辆测试速度快,转向快,横向加速度大,车辆极易发生侧倾、侧滑甚至翻车的危险,驾乘人员安全难以保障;
(2)车辆对发动机转速和松开加速踏板的位置等参数要求非常严格,并且测试过程中禁止接触加速踏板和减速踏板;
(3)为了保证测试的完成,需要具有丰富驾驶经验的驾驶员操控车辆,重复的高速闪避测试影响驾驶员效率;
智能驾驶机器人能够在高危场景、重复性测试场景和对精度高要求的测试场景下替代人类驾驶员完成测试实验。一方面保障麋鹿测试中驾乘人员的安全,另一方面也能够保障麋鹿测试的效率和准确性。
3.1 智能驾驶机器人机构解决方案
中国汽车技术研究中心基于车辆耐久性测试试验需求完成了智能驾驶机器人的研发和产品迭代,目前已经完成了第三代产品的开发与实车测试工作。考虑到麋鹿测试对精度的严苛要求和安全隐患,智能驾驶机器人经过结构优化和算法升级已经完全可以替代驾驶员完成高速场景下紧急避障的麋鹿测试。
面向麋鹿测试的智能驾驶机器人机构包括转向控制机构和踏板执行机构两大部分。其中,转向控制机构(如图5所示)的机械原理为,驱动电机输出轴上安装有主动齿轮,与主动齿轮啮合的从动齿轮带动转向基座转动,转向基座通过尼龙绑带固定在方向盘上,从而实现车辆的转向控制。转向控制机构可实现对车辆方向盘在±500°的区间内进行控制,并且能够柔性适应满足国标要求的方向盘尺寸,最大程度的减小了由于装配不同轴引起的控制误差。
踏板执行机构(如图6所示)则是通过电机带动曲轴连杆机构实现加速踏板和减速踏板的踩踏、释放动作,是对人类驾驶员踏板控制动作的模仿。正常驾驶过程中,驾驶员无需同时踩踏加速和减速两个踏板,因此,踏板执行机构采用一部驱动电机配备电磁离合交叉断开吸合的形式实现对两个踏板的不同步控制。踏板执行机构通过调距螺杆支撑的方式,可适应上汽集团、长城汽车的多款车型前舱尺寸,并实现了加装踏板执行机构的前提下主驾驶位可继续乘坐安全员的测试要求。
3.2 智能驾驶机器人算法解决方案
麋鹿测试对直行路段和转向区域的长度做出了严格的限制,其车道宽度也取决于车辆宽度。考虑到测试路段纵向距离和转向方式相对固定的,且测试过程中车辆速度略有减小而直行路段的宽度逐渐增大,所以测试首要问题是解决车辆在直行路段切换过程中左右转向的控制问题。中国汽车技术研究中心针对麋鹿测试,目前采用预瞄点路径规划和PID算法相结合的控制方法对驾驶机器人的动作执行进行控制以保证车辆顺利通过测试。
测试车辆在高速行驶工况下,从直行路段L1经转向区域A1进入直行路段L2的过程中,车辆动作顺序如下:左转→直行→右转;而在由直行路段L2经转向区域A2进入直行路段L3的过程中,车辆则需要进行以下动作:右转→直行→左转。
经过参数分析和前期试验得知,在左转过程中直行路段L1末端左侧和直行路段L3前端左侧的路锥容易被车辆的左后轮碰撞,同理,在右转过程中直行路段L2前端右侧和末端右侧的路锥容易被车辆的右后轮碰撞,高频碰撞路锥如图7中红点所示。
测试车型的车辆轴距、车宽等参数是固定的,如何控制车辆的转弯半径成为测试路径规划中的首要考虑因素。测试过程中,车辆经过标示线速度后不再增加。对由L1经过A1进入L2这段距离研究分析时可近似认为车速不变,并且考虑到汽车转向控制系统的强非线性特征,故对测试车辆采用预瞄点控制方法。
预瞄控制基于汽车行驶轨迹与预期路径误差最小原则,将预瞄点位置和车辆实时的位置、速度作为整个控制系统的输入,通过计算车辆理想横向加速度并考虑驾驶员反应滞后和车辆动态反应滞后的误差,最终实现较为精准的测试车辆轨迹控制。
图8为测试车辆经过转向区域A1时的规划路径,当测试车辆行驶至C1位置时完成转向角度为θ1的左转动作,以O1为圆心,R1为半径沿圆弧C1C2转向行驶至C2,随后直线行驶至C3,最后以O2为圆心,R2为半径沿圆弧C3C4转向行驶至C4,完成测试要求的第一次转向。
当测试车辆行驶进入转向区域A2前,车速相对转向区域A1略有降低且直行路段L3宽度增加,车辆的转向控制难度降低,在控制流程中,操作步骤与转向区域A1相同,只是转向方向改為右转向,在此不再进行赘述。
中国汽车技术研究中根据ISO麋鹿测试标准进行了场地规划,基于预瞄点路径规划的PID控制算法对智能驾驶机器人动作进行控制,最终操控长城汽车某款SUV以30Km/h和50Km/h的行驶速度(如图9所示)顺利完成了麋鹿测试。
4 总结
伴随着ADAS技术的逐渐成熟,汽车的智能化程度也越来越高。中国的道路交通场景中包括机动车、自行车、电动车、行人等多个参与者使得驾驶场景更为复杂,因此,对汽车的安全性能提出了更为严苛的要求。
智能驾驶机器人技术的发展和成熟,为传统的被动安全性能测试和以麋鹿测试为代表的主动安全性能测试场景中的高危测试场景提供了行之有效的解决方案,一方面最大限度的保障测试结果的准确性和有效性,另一方面也最大程度的保障了实验测试人员的人身安全。
参考文献:
[1]于凯,吴志新,郑继虎,等.智能网联汽车技术[M].北京:社会科学文献出版社,2019:1-2.
[2]中国汽车技术研究中心有限公司.C-NCAP管理规则(2018年版)[S].2018:8-9.
[3]ISO 3888-2:2002,Passenger cars-Test track for a severe lane-change manoeuvre-Part 2:Obstacle avoidance[S].2003.
[4]http://dy.163.com/v2/article/detail/E389UP7U0521C5UM.html,2018.
