基于制动意图识别的纯电动汽车制动能量回收策略研究
2019-10-10乔维高杨永强
乔维高,杨永强,代 真
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
制动能量回收是一种能够提升纯电动汽车能量利用率的重要技术,也是纯电动汽车的重要特征之一[1]。据相关研究表明,若采用合理的回收策略,其续驶里程甚至能够增加10%~30%[2]。制动能量回收是纯电动汽车实现节约能量,提高续驶里程的重要手段之一。
笔者以前轮驱动的某纯电动汽车为研究对象,使用模糊推理对驾驶员的制动意图进行识别与判断,合理协调分配制动力以达到提高制动能量回收率。
1 制动意图识别模型
1.1 制动意图识别参数确定
笔者采用模糊推理的方法来对驾驶员的制动意图进行识别。正确选取模糊推理的输入参数对驾驶员的制动意图识别十分重要。用于制动意图识别的参数有制动踏板开度、制动踏板开度变化率、制动踏板力、加速踏板开度和车速等[3]。其中,车速可以反映车辆当前的行驶状态。制动踏板开度在一定程度上反映了制动力大小需求,可以较全面地反映驾驶员的制动意图。制动踏板开度变化率即制动踏板速率反映了制动的紧急程度[4]。因此,选取车速、制动踏板开度及制动踏板开度变化率为驾驶员制动意图识别的输入参数,建立多输入单输出的模糊推理模型[5]。
1.2 制动意图识别参数模糊化
设P为制动踏板开度,dP为制动踏板开度变化率,V为车速。将制动踏板开度、制动踏板开度变化率和车速的变化范围分为3个区间。即输入变量的区间表示为:P[0,100];dP[-20,150];V[0,160]。具体分类如表1所示,其中S、M、H分别代表小、中、大3个区间[6]。
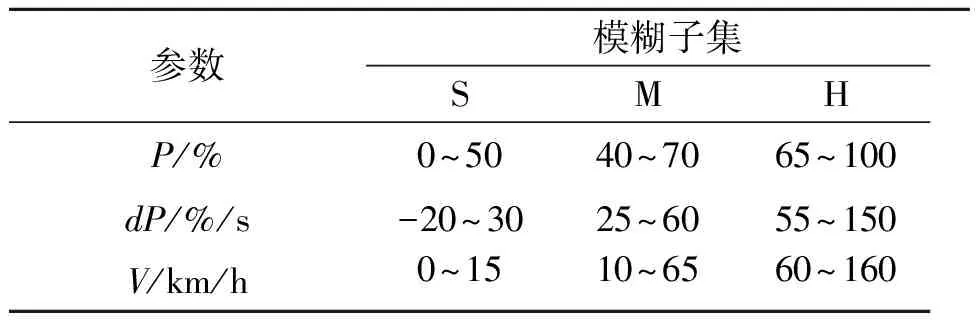
表1 参数模糊化
1.3 模糊推理规则的确定
(1)确定各参数的隶属度函数。制动踏板开度、制动踏板开度变化率和车速的隶属度函数如图1~图3所示。
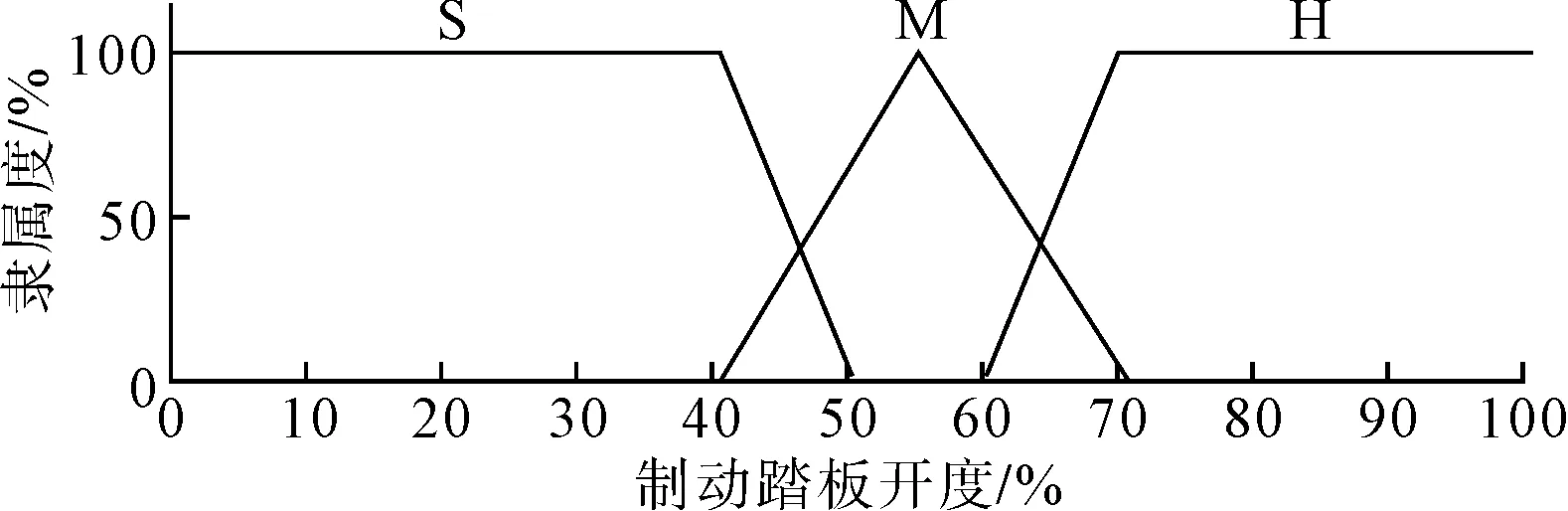
图1 制动踏板开度隶属度曲线

图2 制动踏板开度变化率隶属度曲线
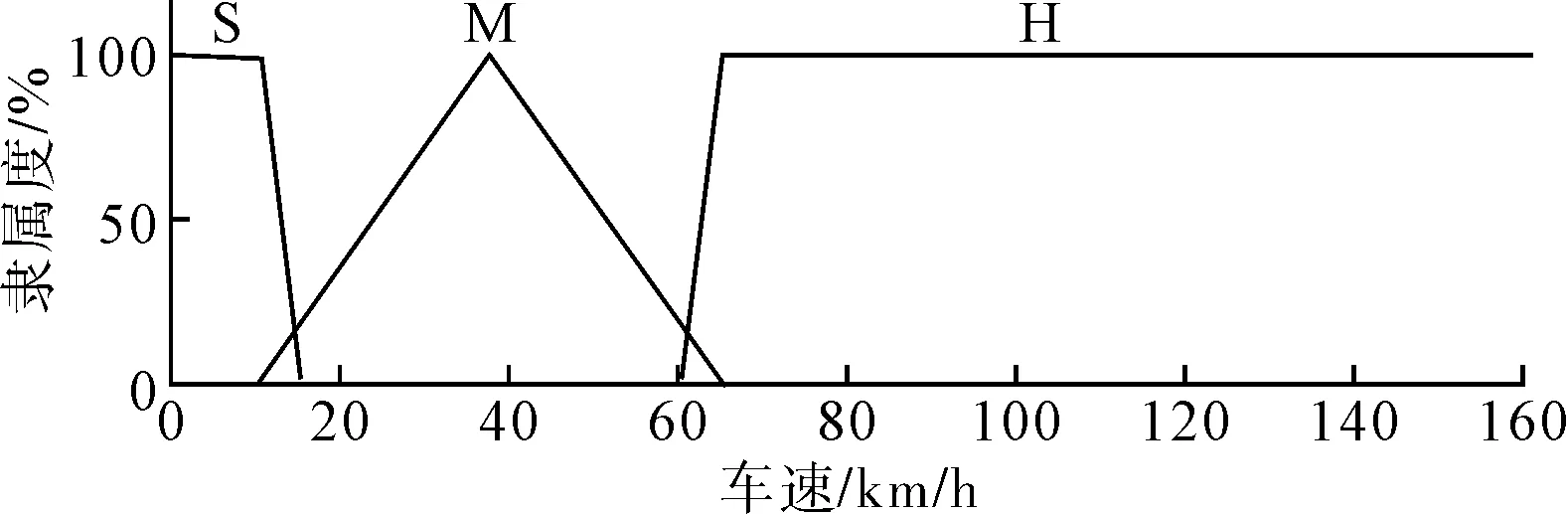
图3 车速隶属度曲线
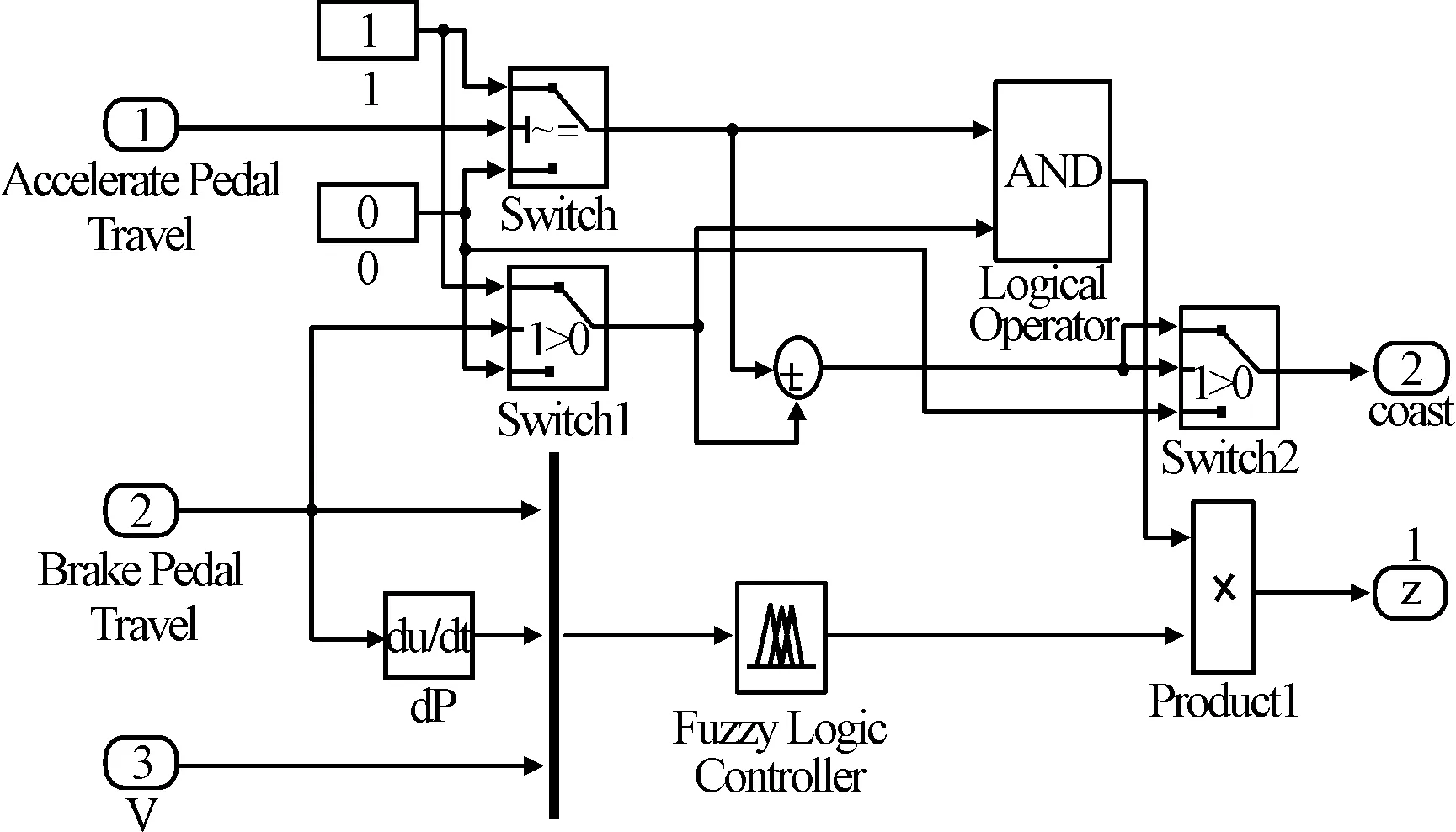
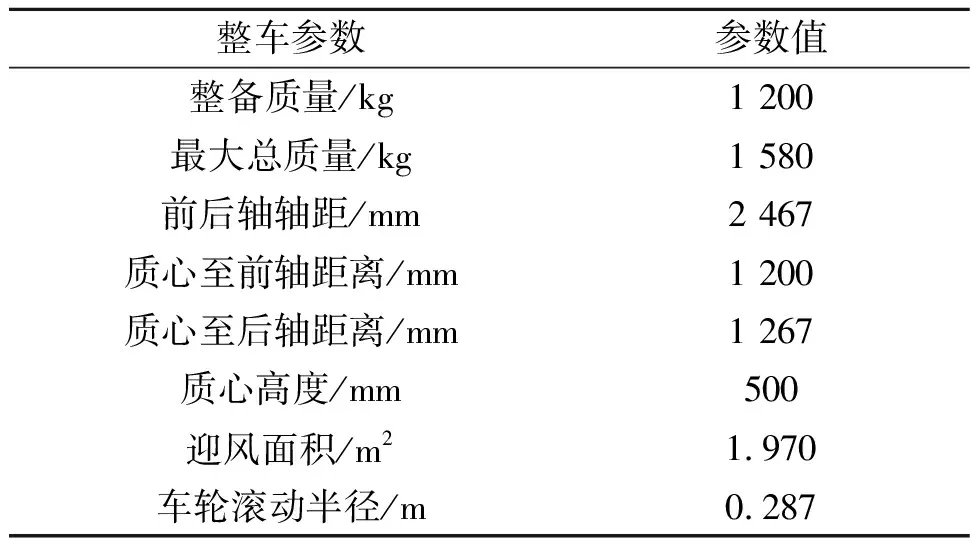
(2)确定以制动强度为模糊推理的输出参数。将输出制动强度归类为3种制动模式:持续制动模式、常规制动模式和紧急制动模式。这3种制动模式对应的制动强度范围分别为:持续制动模式中制动强度z≤0.3;常规制动模式中制动强度0.3 在确定制动意图的模糊推理方法后,运用Matlab/Simulink搭建制动意图识别模型,如图4所示。首先根据制动踏板和加速踏板的位移情况判断车辆运行模式,当车辆处于制动模式状态时,运用Matlab模糊控制工具箱进行驾驶员制动意图识别[7]。只有当加速踏板位移为0且制动踏板位移为正时,才会输出有效的制动强度z,否则制动强度为0,后续的制动力分配将会根据输出的制动强度进行。当加速踏板位移与制动踏板同时为0时,输出制动强度为0,同时输出逻辑值1,表示进入滑行模式,电机可以进行滑行回馈制动。当加速踏板为正时,输出制动强度与判断是否滑行的逻辑值均为0,即无制动且不回收。 图4 制动意图识别模型 制动力分配策略首先需要考虑2个要点:①制动时方向稳定性:需要准确地响应驾驶员的制动需求,在提供车辆所需的总制动力的前提下,合理地分配前后轴制动力,避免车辆制动时发生跑偏、侧滑或失去转向能力等情况,保证车辆制动时的方向稳定性;②能量回收率:以车辆安全制动为前提,在满足ECE(economic commission of Europe)制动法规的条件下,尽量将制动力分配给电机制动系统,尽可能多地回收制动能量,延长车辆的续驶里程[8]。 具体制动力分配策略如图5所示。图5中I曲线为理想前后制动器制动曲线;Z1为仅前轴制动的临界制动强度;Z2为纯机械制动的临界制动强度;Fm为电机可提供的最大制动力。 图5 制动力分配策略 首先获得制动强度z值,同时获得电机可提供的最大力矩,计算电机可提供的最大制动力Fm。 当z1 当z 当z>z2时,不回收制动能量,为纯机械制动[9]。 在AVL Cruise软件中建立纯电动汽车整车底盘模型。并在Simulink软件中根据纯电动汽车制动能量回收策略,搭建制动能量回收控制模型。 车辆模型中需要设置名义尺寸、整备、阻力特性等基本参数,它是整个模型最基础的部分。某前轴驱动的纯电动汽车的整车参数如表2所示。 表2 整车参数表 选取新欧洲行驶工况NEDC(new European driving cycle)循环工况和美国城市工况FTP75循环工况来模拟车辆的实际行驶情况,进行仿真研究[10]。将动力电池初始SOC值设置为0.90,在FTP75循环工况下分别对模糊控制策略和Cruise自带策略进行仿真,以电池的SOC值为监测目标,以车辆消耗的总能量、制动消耗的能量以及电机回收的能量为评价指标。NEDC和FTP75循环工况下电池SOC变化结果如图6和图7所示,两者工况能量分析如表3和表4所示。 图6 NEDC循环工况电池SOC变化曲线 图7 FTP75循环工况电池SOC变化曲线 表3 NEDC循环工况能量分析 表4 FTP75循环工况能量分析 从图6和表3可知,在NEDC循环下,采用模糊控制策略比采用Cruise自带策略,SOC整体下降的更为缓慢,车辆的制动能量回收率提高了4.27%,总能量回收率提高了1.97%。 从图7和表4可知,在FTP75循环下,采用模糊控制策略比采用Cruise自带策略,SOC整体下降更为缓慢,车辆的制动能量回收率提高了6.73%,总能量回收率提高了3.08%。 (1)在传统制动能量回收控制策略的基础上添加了驾驶员制动意图识别的过程,使用模糊推理对驾驶员的制动意图进行识别与判断,确定了前后轴制动力的分配比例,提出了一种用于前轮驱动的基于制动意图识别的纯电动汽车制动能量回收控制策略,以提高制动能量回收率。经联合仿真分析得出相比Cruise的自带策略,该策略对纯电动汽车进行制动能量回收时,能量回收率更高,效果更好,是一种具有一定优势的纯电动汽车制动能量回收控制策略。 (2)在AVL Cruise软件中建立了纯电动汽车的整车底盘模型,在Matlab/Simulink软件中建立了制动能量回收策略模型。根据仿真结果,车辆在FTP75城市循环下的制动能量回收率比在NEDC综合循环下的回收率高,即城市工况更有利于制动能量回收。1.4 制动意图识别模型的建立
2 制动力分配策略

3 纯制动能量回收策略模型的建立
4 制动能量回收策略仿真及结果分析




5 结论
