新三电平虚拟空间矢量的调制算法研究
2019-10-09黄焕强迟屹楠黄照贺吴钊铭尹龙强
黄焕强,迟屹楠,吴 艺,黄照贺,裴 璐,吴钊铭,尹龙强
(1.深圳供电局有限公司,广东 深圳 518000;2.深圳市泰昂能源科技股份有限公司,广东 深圳 518133)
0 引言
传统空间矢量算法是通过三电平三维空间矢量在二维平面上的投影实现的。针对三电平的矢量算法,最早由国外专家提出了多种实现方式[1-3]。虚拟矢量算法是由空间矢量算法发展而来的、较为新颖的算法。文献[4-6]提出采用虚拟矢量的方法实现三电平空间矢量调制和控制。另外,对比虚拟矢量和传统空间矢量技术。虚拟矢量在母线中点控制技术[7-9]实现方面比较复杂,但是其对谐波和共模分量的抑制较好,应用具备广泛性,因此获得业界青睐。以日本安川电机等为代表的日本厂家,目前主推的就是虚拟矢量的电机控制技术。
简言之,虚拟空间矢量脉宽度调制(virtual space vector paulse width modulation,VSVPWM)方法是通过将传统三电平空间矢量脉宽调制转化为虚拟矢量脉宽调制,实现对中线电流为零的控制,从而消除中点电位的低频波动。但是这个方法本质上属于开环控制,无法针对母线中的点电位偏移实现闭环调节,在电网跳变和不平衡跌落等工况下逆变器会产生母线中点电位偏移。针对上述问题,很多学者提出了一系列闭环方法[10-12],但基本上处理方法更加复杂,且中点电位偏移改善的效果并不理想。因此,需要跳出固有的思维,研究一种新的改进方法,如用闭环控制方式抑制母线中点电位偏移。
1 三电平拓扑模型
典型的三电平拓扑模型如图1所示。
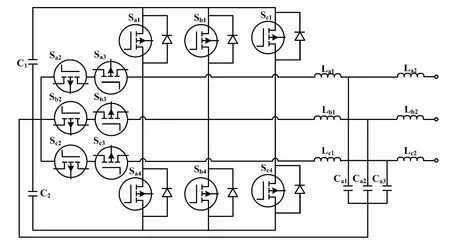
图1 三电平拓扑模型
该拓扑采用高效率的T型三电平拓扑,共12个电力电子开关管:Sa1~Sa4、Sb1~Sb4、 Sc1~Sc4。这种拓扑的难点在于需要保证正负母线平衡,也就是电容C1和C2电压一致,否则容易出现开关管过压等情况。另外,虚拟空间矢量、三维空间矢量和传统空间矢量等算法均可应用在此拓扑模型上。
2 算法实现
2.1 空间矢量传统算法概述
空间矢量算法一般都遵循最近小矢量合成原则:
(1)
式中:矢量V为给定矢量;V1、V2、V3为临近V的3个空间矢量,可以合成并代替V;Ts为矢量V的作用时间;T1、T2、T3分别为空间矢量V1、V2、V3的作用时间。
对于三电平拓扑,开关闭合用1表示,断开用0表示。用i表示A 相、B 相和C 相中的任意一相,Si1-Si4代表任意一相开关管的状态。当{Si1,Si2,Si3,Si4}= {1,1,0,0}时,用状态P表示;当{Si1,Si2,Si3,Si4} ={0,0,1,1} 时,用状态N表示;当{Si1,Si2,Si3,Si4}={0,1,1,0} 时,用状态O表示。根据图1,得到27个基本矢量。其中:零矢量3 个,小矢量12 个,中矢量6个,大矢量6 个。
传统三电平空间矢量图如图2所示。空间矢量图分为6个等边三角形大扇区SECTORⅠ、SECTORⅡ、SECTORⅢ、SECTORⅣ、SECTORⅤ、SECTORⅥ。每个大扇区又分为4个小三角形扇区。为了细化调制得,可以在4个小三角形扇区基础上再细分为6个小三角形扇区,这里不再赘述。
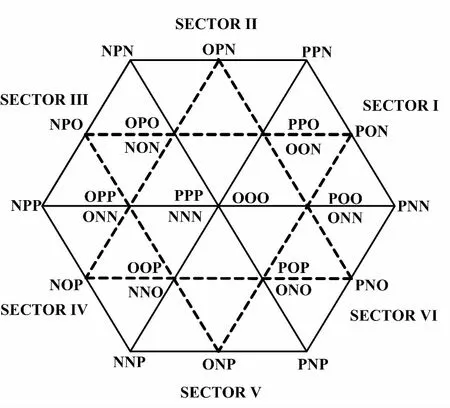
图2 传统三电平空间矢量图
2.2 虚拟矢量传统算法概述
通过沿用上面基本矢量的传统获取方法,将基本矢量中的部分矢量合成形成虚拟矢量,以第1扇区SECTORⅠ为例,将基本空间矢量PWM 转化为虚拟矢量,通过式(2)完成。
(2)
式中:VVS1、VVS2为虚拟小矢量;VVL1、VVL2为虚拟大矢量;VVM1为虚拟中矢量;VPOO、VONN、VPPO、VOON为基本小矢量;VPON为基本中矢量;VPPN、VPNN为基本大矢量。
虚拟大矢量就是基本大矢量,虚拟中矢量和虚拟小矢量需要用基本中矢量和基本小矢量合成。
以基本中矢量VPON为例,因其对应的中点电流ib通常不为零,随时间变化,会对中点电压造成不可控影响。在一个采样周期内,在原本的基本中矢量上加入相邻的两个基本小矢量VOON、VPPO(对应中点电流分别为ia和ic),令三者作用时间相同,以虚拟矢量代替原来的基本中矢量,可消除中矢量对中点电压的影响。采用虚拟中矢量代替原来的基本中矢量后,一个扇区被分成了5个小区域。第1扇区的虚拟空间矢量划分如图3所示。
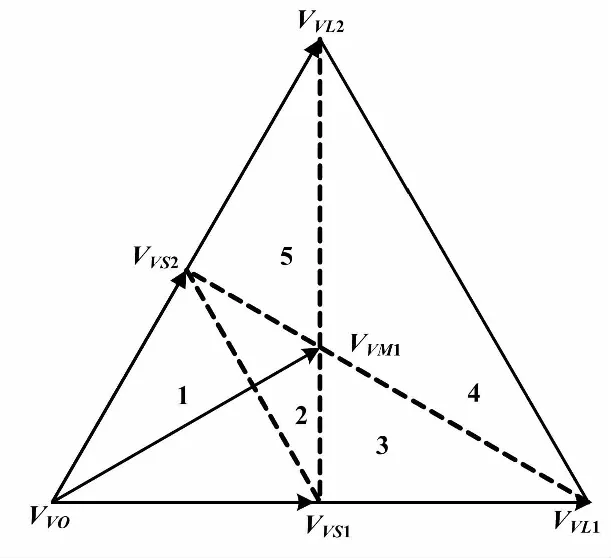
图3 第1扇区的虚拟空间矢量划分图
2.3 中点平衡存在问题
实际应用中,会遇到大量调制比m接近1的工况。m接近1的给定矢量旋转过第1扇区示意图如图4所示。
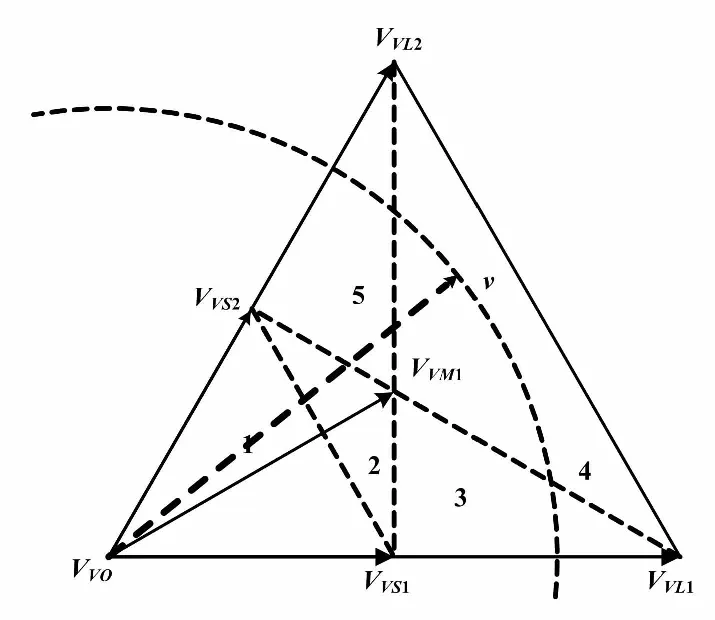
图4 m接近1的给定矢量旋转过第1扇区示意图
当调制比m接近1时,即临界调制工况(调制比大于1为过调制工况),A、B、C三相电压的等效旋转矢量Vref(V)以Vvo点为圆心旋转。当Vref扫过第1扇区的小扇区4时,因为矢量V扫过扇区3和扇区5的时间很短,母线平衡能力差。其他五个大扇区同理。
2.4 改进虚拟矢量方法
2.4.1 扇区划分
针对母线平衡能力较差的问题和扇区过度问题[11],提出一种改进方法。大扇区方式和传统方式一样也划分为6个扇区。小扇区划分方式为:一个大扇区分为8个小三角形区域,标示为11区、12区、21区、22区、3区、5区、41区、42区。
第1扇区划分如图5所示。

图5 第1扇区划分图
图5中:原来的1区被分解为两个等面积区域11和12;原来的2区被分解为两个等面积区域21和22;原来的4区被分解为两个等面积区域41和42;原来的3区和5区保持不变。其中:11 区、21 区、41 区和3 区的矢量都采用3区的三角形顶点的三个矢量VVM1、VVS1、VVL1合成;21 区、22 区、42 区和5 区的矢量都采用5 区的三角形顶点的3个虚拟矢量VVM1、VVS2、VVL2合成。
本方法可以显著简化传统虚拟矢量算法复杂的计算,处理原来系统难以处理的外部打破中点电位平衡因素,以及外部变化引起的点偏移,如并网逆变系统在电网跳变或不平衡跌落产生的中点偏移。总之,三角形区域按照三矢量原则,常规方式应该选取VVL2、VVM1、VVL1。实际上,新的虚拟矢量调制方法选取的是VVL2、VVS2、VVM1或者VVM1、VVS1、VVL1等效合成。这样的好处是:VVL2、VVM1、VVL1这3个矢量属于虚拟大矢量和虚拟中矢量,不具备母线平衡能力。小虚拟矢量VVS2、VVS1具备母线平衡能力。因此,只有合成三矢量中带有小矢量,才具备更好的闭环母线平衡能力。
本文采用小扇区3和小扇区5区的三角形小矢量进行调制。由于VVS2、VVS1具有母线平衡调节能力,则可以非常有效地避免该问题。另外,改进的虚拟矢量方法中,I扇区的所有的矢量和时序图都只用到2个(即矢量为原来3 区和原来的5区),原来要用5个时序图,大大简化了运算。
2.4.2 矢量作用时间计算
根据式(1),计算T1、T2和T3。
电压Vref用3个矢量V1和V2和V3以及作用时间T1、T2和T3的乘积来等效。其中:Vref矢量作用时间Ts。因为时间是不可能是负的,最小也是0,所以实际软件中需要作限幅处理。特别是针对过调制等工况,需要等比例进行变换。
2.4.3 时间状态分配
通过五段式和七段式的仿真[12],与试验结果进行比较。七段式的开关效率相对五段式虽然降低,但是可以大幅度减小调制引起的谐波。所以,优先采取七段式调制。在进行时间状态分配的时候,采用七段式对称输出方式的第1扇区时间状态分配如图6所示 。
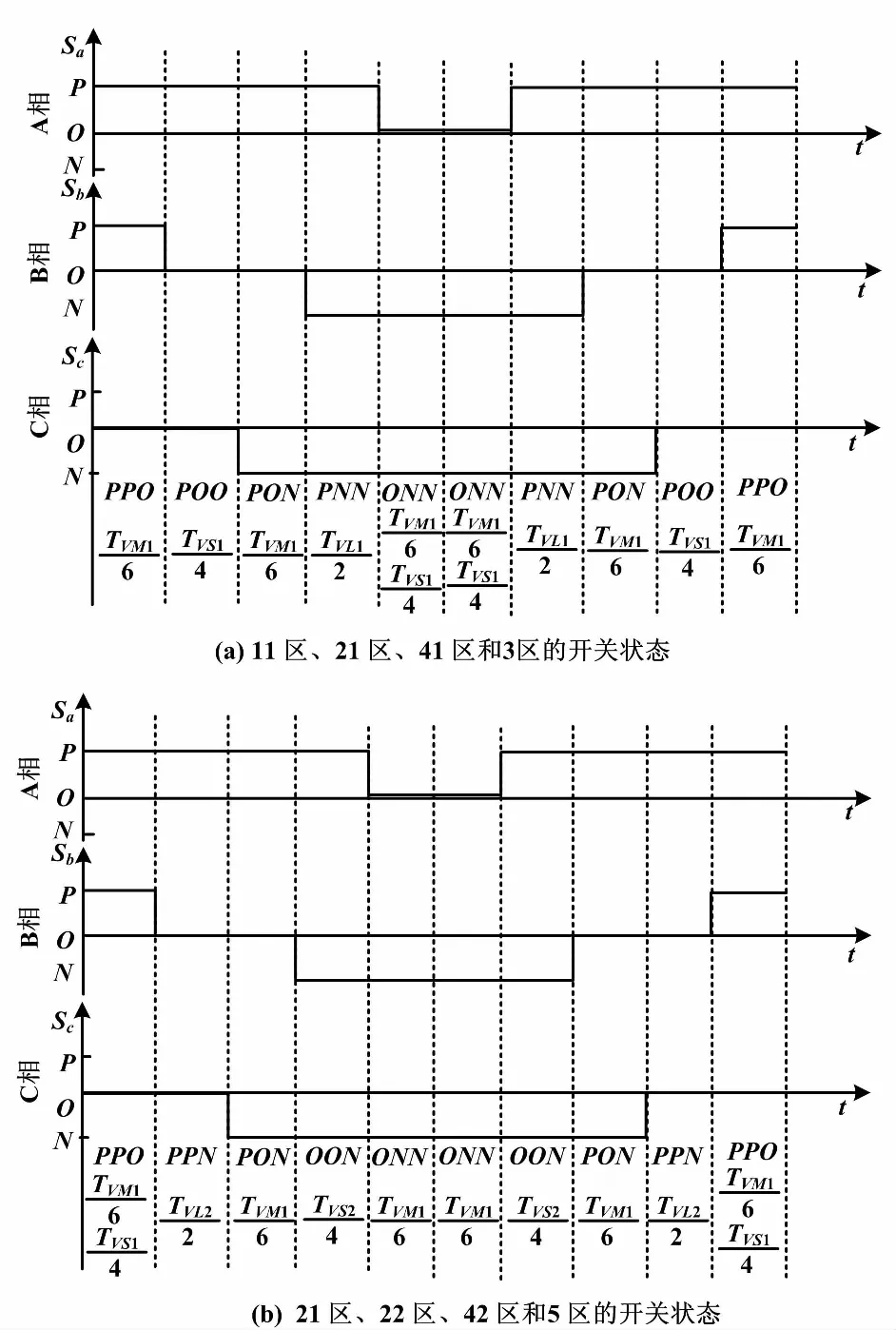
图6 第1扇区时间状态分配图
2.4.4 中点平衡乒乓控制
与传统虚拟空间矢量的划分不同,新的方法需要对小扇区重新进行划分;然后,再根据重新划分的小扇区选择和确定具体合成矢量。
根据式(1)解方程,可以得到T1,T2和T3。然后通过图6方式来分配矢量以及作用时间,进而得到VVM1、VVS1、VVL1等矢量的作用时间TVM1、TVS1、TVL1,引入冗余因子f(f的选取范围为0到1)。
引入冗余因子f后,正小矢量作用时间为:
(3)
负小矢量作用时间为:
(4)

这里需要着重强调的是,为了达到更好的精度,惯性思维容易将冗余因子f通过正负母线差控制器的输出来设计。但是通过大量的仿真和试验发现,这里采用乒乓控制(也就是滞回控制)较为理想。
相对于其他控制器,乒乓控制器在处理虚拟空间矢量中点平衡方面具备明显优势。这是因为传统的PI控制器中的积分环节会把前面时刻的累积效应带入现在时刻,在电流突变或者电压跳变等工况下,往往调节能力很差,反应速度跟不上。乒乓控制器则没有这个顾虑,可以不受上述误差的影响,做到快速响应和实时调节。其调节的优越性远远超过传统的PI控制器。
3 仿真及试验
搭建Matlab/Simulink仿真平台和样机试验平台,完成软件核心算法设计。虚拟矢量调制电压波形如图7所示。

图7 虚拟矢量调制电压波形
本次系统控制采用美国TI公司的DSP28335芯片,样机为50 kVA的逆变器,装置的额定电流有效值为IN=75 A,选用 Vincotech 公司型号为30-FT12NMA160SH02-M669F28的绝缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)(额定电流160 A),母线电容6 000 μF, 滤波电感1.2 mH和400 μH,滤波电容4.7 μF。变换器软件控制部分,利用数字信号处理器(digital signal processor,DSP)算法产生IGBT驱动波形控制,利用DSP采集系统电压、电流等。半负载到满载突加突卸,直流侧的上下电容电压(也就是正负母线)经动态调节后基本可以达到平衡,随动性能较好,保持了良好的动态调节能力。
负载突变工况下,试验波形如图8所示。
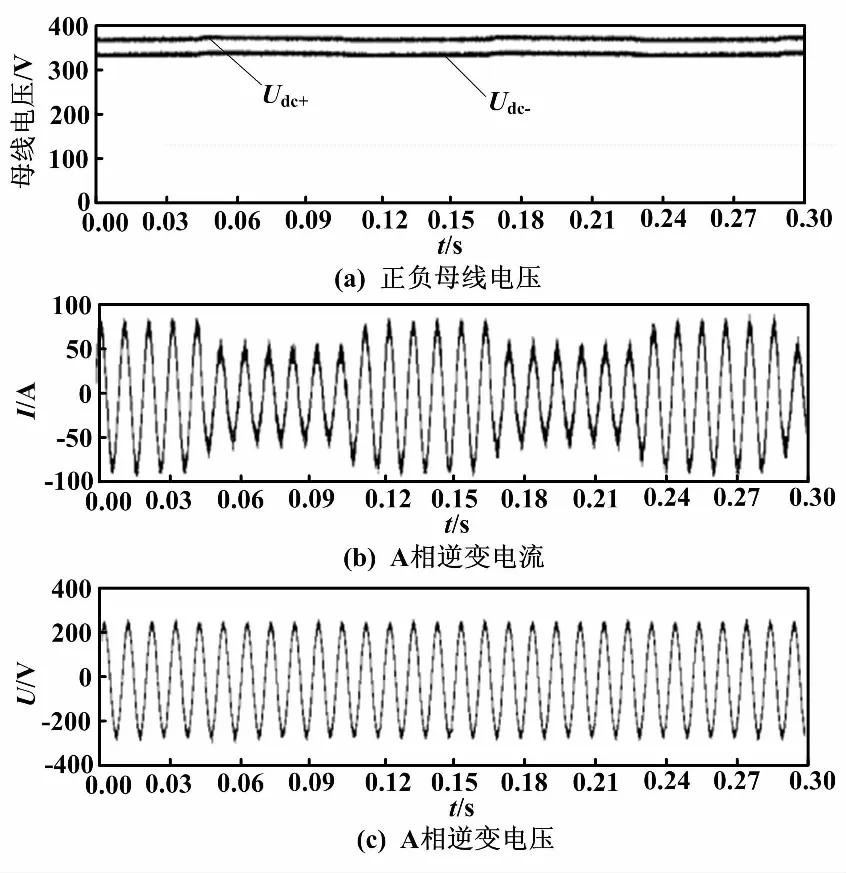
图8 试验波形
4 结束语
通过理论计算和仿真建模,构建并实现了一种新的三电平虚拟空间矢量的算法。该算法相对于传统算法,大大减少了DSP芯片计算的复杂度,提高了母线
平衡动态机制,抑制了中点偏移,完善了三电平虚拟空间矢量技术。通过相关的试验,验证了该算法的可行性和有效性。
