基于旋转永磁体的超低频机械天线电磁特性分析*
2019-10-09施伟周强刘斌
施伟 周强 刘斌
(国防科技大学第六十三研究所,南京 210007)
1 引 言
在微波与毫米波频段,小口径的天线就可以获得较高增益,满足高速大容量通信需求.然而在特殊应用场合,例如地下和水下的通信与探测,微波与毫米波迅速衰减,难以穿透传播至较深位置,应用范围严重受限.而超低频电磁波(30—300 Hz)在一般导电介质中趋肤深度大、衰减慢、传播距离长,例如,设海水电导率为4 S/m,相对介电常数为81,则频率为160 Hz的电磁波在海水中的趋肤深度为20 m,有望穿透海水实现深水通信与探测.但是,超低频电磁波在空气中的波长为1000—10000 km,尽管超低频天线尺寸庞大,但与波长相比,仍然属于电小天线,因此,超低频天线辐射电阻小,Q值高,带宽窄,必须加入阻抗匹配网络,才能实现超低频天线的阻抗匹配,但这会显著增加损耗电阻,导致超低频天线辐射效率很低.美国典型的超低频岸对潜发信台,尽管发信速率很低,但发信台占地面积仍然很大,发信功率达到兆瓦量级[1].因此,必须研究一种新型天线技术,能显著降低超低频发射天线的尺寸,提高辐射效率.有学者对压电薄膜进行非对称激励,由对称破缺效应产生电磁辐射,能使天线尺寸摆脱对波长的依赖[2].采用分层的铁磁/压电异质结构形成磁电型天线,能够以很小的电尺寸,产生甚高频辐射场[3−6],但这些新技术尚未能拓展应用于VLF以下频段.为此,美国国防高级研究计划局DARPA (Defense Advanced Research Projects Agency)于2017年1月提出并资助机械天线研究项目[7],主要思想是将驻极体或永磁体机械运动,产生超低频时变场用于水下通信.与传统电激励的天线技术不同,机械天线将机械能向电磁能转换,不需要阻抗匹配网络,有望实现高效小型化的超低频发信机.
在DARPA的资助下,面向特低频(300 Hz—3 kHz)和甚低频(3—30 kHz)应用,涌现出各形机械天线的设计概念[8−10].驻极体能长期存储空间电荷或偶极电荷,机械驱动驻极体线性位移振动或者旋转,可以产生类似电偶极子的时变电磁场[11,12].驻极体机械天线是基于电偶极子辐射机理,相对于旋转永磁体,同等条件下辐射效率高,但要在驻极体上产生稳定持久、高密度的静电荷(10–6C/m2以上)存在技术难度,因此,较多研究机构选择旋转永磁体作为机械天线的方案.美国弗吉利亚理工学院研究了旋转永磁体作为机械天线用于水下导航的场强计算表达式[13],但未给出详细推导过程.文献[14]基于矢量磁位,详细推导了旋转永磁体的电磁场表达式,该表达式与永磁体剩余磁感应强度Br和体积V相关,该方法针对性强,但通用性较弱,难以通过电磁场对偶原理快速获取旋转驻极体(注: 另一种机械天线)的场分布.美国加州大学洛杉矶分校选择旋转永磁体产生时变场,虽然给出了旋转永磁体场强计算表达式[15,16],但均为近似条件下的远场分布,未研究其近场特性.实际上,旋转永磁体的远区场很微弱,难以探测接收,而近场通信有可能是旋转永磁体的重要应用方向,因此有必要重点研究其近场传播特性.文献[17]提出旋转永磁体阵列应用的设计概念,但未给出仿真结果.
为了研究旋转永磁体机械天线的基础理论,首先需要建立无限大空间旋转永磁体的场强计算模型,能够适应有耗介质,分析近场和远场,为后续研究旋转永磁体在分层介质中的电磁特性打下基础.本文研究了旋转永磁体和空间正交磁偶极子的等效关系.与文献[14]的方法不同,本文基于并矢格林函数,将旋转永磁体的初始旋转角等效为正交磁偶极子的初始相角,详细推导了空间正交磁偶极子在无限大空间中的场强计算表达式,从而获得旋转永磁体在无限大空间中的通用分析模型.该模型适用于任何有耗介质下的近场和远场计算,在形式上与旋转驻极体的电磁场表达式是统一的,可以通过电磁场对偶原理快速得到旋转驻极体的电磁场计算表达式,无需重新推导,因此,与文献[14]中矢量磁位的方法相比,通用性较强.将该方法计算结果与文献[13]进行对比,符合很好,验证了本文方法的有效性.本文以钕铁硼(NdFeB)永磁体为例,其剩余磁感应强度Br=0.8 T、体积V=270 cm3(30 mm×30 mm×300 mm),给出了磁场水平分量Bφ在不同介质环境下随距离和频率的变化曲线.为了增加近区场强,本文提出采用小尺寸旋转永磁体组阵,通过场的空间合成方法增加场强有效覆盖距离,通过调整阵元间距和初始旋转角,对场分布特性进行灵活调控.本文以两个旋转永磁体组成二元阵,假设阵元之间初始旋转角相同,在自由空间和海水两种环境下,仿真计算了近区磁场分布方向图.仿真表明,当阵元间距选择适当时,近区Bφ能增加3 dB.如果永磁体阵元之间的初始旋转角不同,可以对近区Bφ的方向图形状进行灵活调控.这一结论为进一步研究数量更多的旋转永磁体阵列打下基础.
本文的内容构成如下: 第2节仿真验证了永磁体和磁偶极子在一定区域内的场分布等效关系,说明旋转永磁体可以等效为旋转磁偶极子; 第3节推导了旋转磁偶极子和空间正交磁偶极子的等效关系,并基于空间正交磁偶极子模型,用并矢格林函数,详细推导了空间正交磁偶极子的场强模型,该模型可用于分析旋转永磁体的电磁特性; 第4节给出了旋转永磁体及其二元阵列的相关仿真结果;第5节给出了相关研究结论.
2 永磁体模型
设矩形永磁体(长a×宽b×高h)中心位于坐标原点,其尺寸标识如图1所示.根据安培环路定理,推导得出矩形永磁体的外部磁场微积分表达式为[18]

图1 永磁体和等效磁偶极子坐标示意图 (a) 永磁体;(b) 电流环(磁偶极子)Fig.1.Schematic illustration of permanent magnet and equivalent magnetic dipole: (a) Permanent magnet; (b) equivalent magnetic dipole.
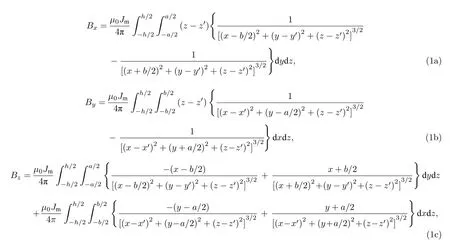
其中Jm为永磁体的表面束缚电流密度,可以测试永磁体外部磁场,利用(1a)—(1c)式经计算获得Jm[18].另一方面,若知道永磁体的剩余磁感应强度Br,则Jm=Br/µ0[19,20],µ0=4π×10−7H/m.反之,知道了Jm,也很容易求得剩余磁感应强度Br.
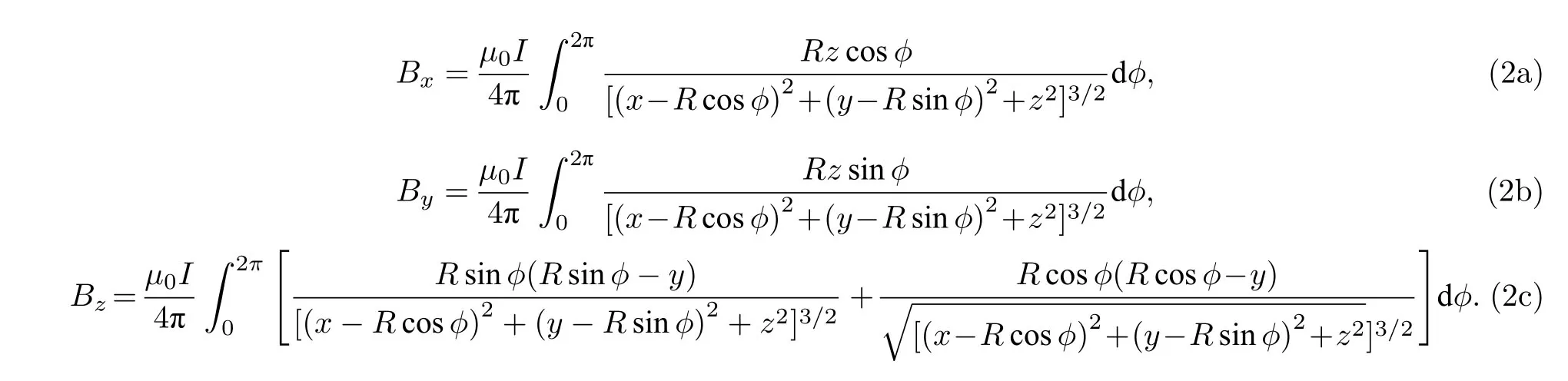
恒电流环如图1所示,半径为R,恒电流强度为I,产生的磁感应强度数值计算表达式(式中ϕ和θ是球坐标系下的变量)如下:
设图1(a)中NdFeB永磁体的表面束缚电流密度Jm=624259 A/m,该数值根据文献[18]中的测试数据及公式经计算获得,由Jm=Br/µ0,可得NdFeB永磁体的剩余磁感应强度Br≈ 0.8 T.永磁体的a=30 mm,b=30 mm,h=300 mm,因此体积V=270 cm3.将这些参数代入(1a)—(1c)式,可获得永磁体外部任一点的磁感应强度.在此基础上,调整图1(b)中电流环的半径R和电流I,并代入(2a)—(2c)式,使两者的磁场分布曲线尽量符合,从而建立电流环和永磁体之间的等效关系.本文在永磁体外部选取四条考察基线,计算磁感应强度Bz分量,如图2所示.这里,取电流环半径R=170 mm,电流I=1700 A.可见,在四条基线上,当距离永磁体超过500 mm后,两者的计算结果符合很好,也就是说,在大于500 mm的距离上,可以用半径R=170 mm和电流I=1700 A的电流环对永磁体进行等效替换.图1(b)中的电流环即磁偶极子qml,根据文献[21],qml=µ0IS,电流环面积S=πR2.
3 旋转永磁体的场分析
3.1 空间正交磁偶极子模型
如图3(a)所示,旋转永磁体在xoy平面上绕原点逆时针匀速旋转,角速度为ω,初始旋转角为ϕ0.磁偶极矩随时间的变换关系如下:
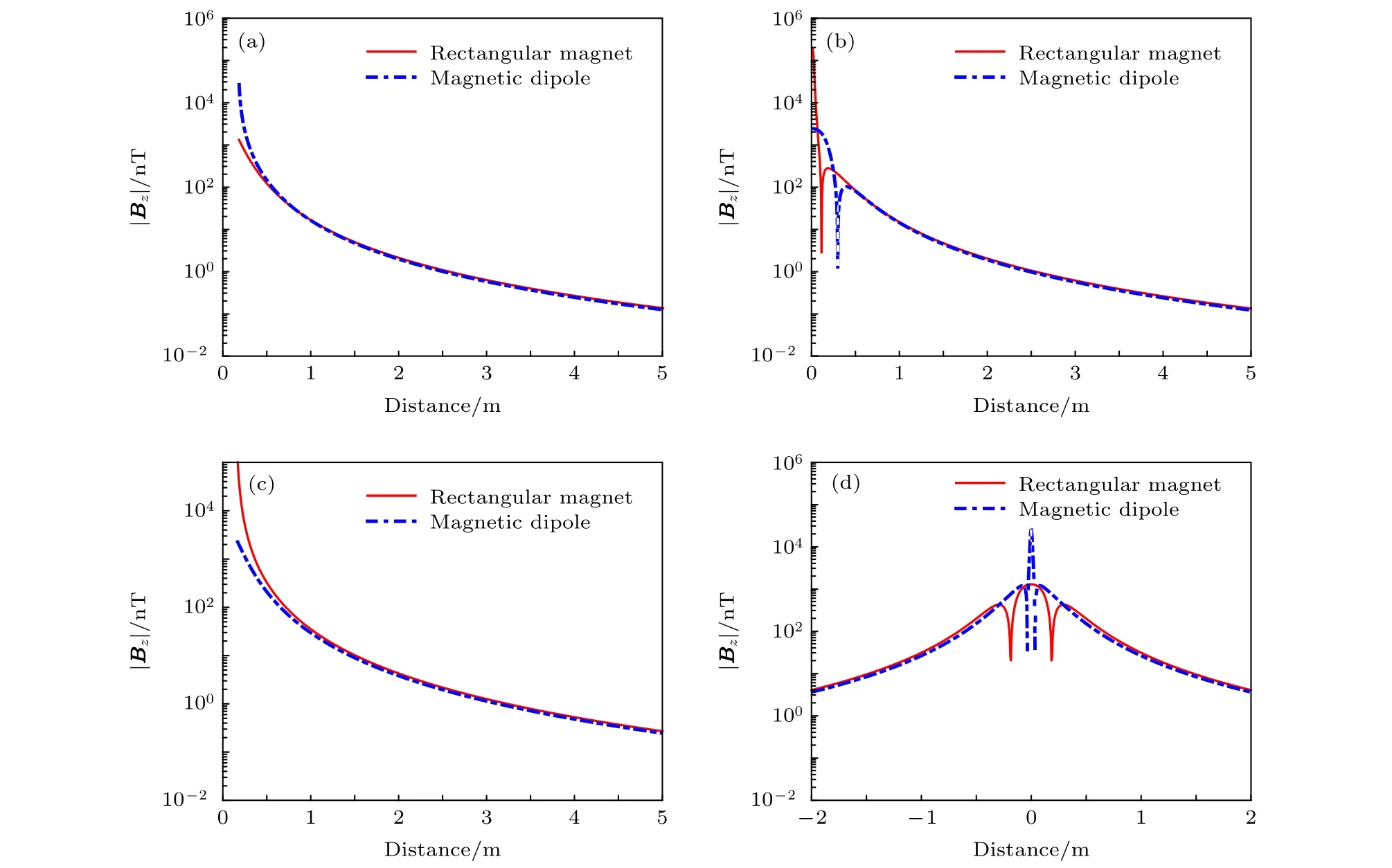
图2 |Bz|随距离的变化(矩形永磁体和理想磁偶极子) (a) y=0,z=0,沿x轴变化; (b) x=0,z=160 mm,沿y轴变化; (c) x=0,y=0,沿z轴变化; (d) x=0,y=180 mm,沿z轴变化Fig.2.Variation of |Bz| versus distance (rectangular permanent magnet and ideal magnetic dipole): (a) y=0,z=0,along x-axis;(b) x=0,z=160 mm,along y-axis; (c) x=0,y=0,along z-axis; (d) x=0,y=180 mm,along z-axis.

可见,磁偶极矩在xoy平面上的两个正交分量呈简谐变化,这是由长度矢量l的简谐时变特性引起的.在旋转过程中,磁偶极子的磁荷是不变的.若对(3)式进行变换,如下所示:
则(4)和(3)式在数学形式上完全相同.(4)式可以看作两个磁偶极子,沿x和y方向空间正交放置,如图4(b)所示,每一个磁偶极子的长度是不变的,但磁荷qm呈简谐变化.其中y方向的磁偶极子相位滞后x方向磁偶极子90°,即旋转磁偶极子可等效为一对正交的时变磁偶极子.在图4(b)的一对正交磁偶极子模型中,由于每一个磁偶极子的磁荷qm做简谐变化,如果在正负磁荷之间用导线相连,则导线上将产生正弦磁流,因此,时变磁荷的磁偶极子模型可以看作正弦磁流元Iml.根据i=dq/dt,有如下关系存在:

其中Im=jωqm.可见,永磁体机械旋转的初始角ϕ0对应于(5)式中等效磁流元的初始相位.因此,图4(b)中时变磁荷的正交磁偶极子可以等效为空间正交的正弦磁流元,如图4(c)所示,其中y方向的时变磁流元在相位上滞后x方向磁流元90°.
综上所述,为了分析旋转永磁体产生的电磁场,可以将旋转永磁体等效为旋转磁偶极子.由于磁偶极子和电偶极子的场分布具有对偶关系,如果能获得旋转电偶极子的场分布,则同样得到旋转磁偶极子的场分布.与图4类似,旋转电偶极子也可以等效为正交排列、相位相差90°的无限小正弦电流元.因此,本文首先基于无限小电流元在自由空间中的并矢格林函数[22],求解空间正交电偶极子的场分布,进而通过对偶原理得到空间正交磁偶极子的场,即旋转永磁体的外部场.
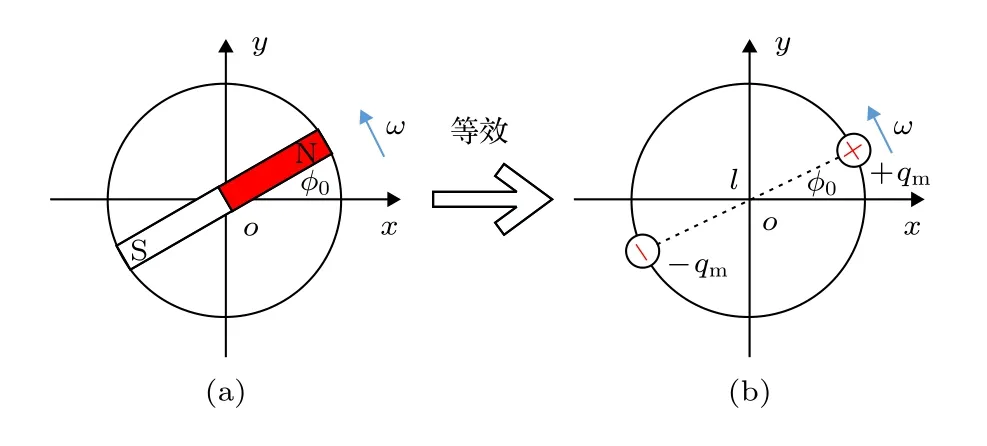
图3 旋转永磁体与旋转磁偶极子的等效 (a) 旋转永磁体; (b) 旋转磁偶极子Fig.3.Schematic illustration of the equivalence between spinning permanent magnet and spinning magnetic dipole:(a) Spinning permanent magnet; (b) spinning magnetic dipole.

图4 旋转磁偶极子与正交磁流元的等效关系 (a) 旋转磁偶极子; (b) 正交磁偶极子; (c) 正交磁流元Fig.4.Schematic illustration of the equivalence between spinning magnet dipole and orthogonal magnetic dipoles: (a) Spinning magnet dipole; (b) orthogonal magnetic dipoles; (c) orthogonal magnetic currents.
3.2 基于并矢格林函数的解析解
正交电偶极子位于坐标原点,如图5所示,x方向的电偶极子表示成xIejϕ0·lδ(r′) ,由于y方向的电偶极子相位滞后于x方向的电偶极子90°,因此y方向电偶极子表示为y(−j)Iejϕ0·lδ(r′).在自由空间中,对于任意电流源分布,基于并矢格林函数的电场表达式为


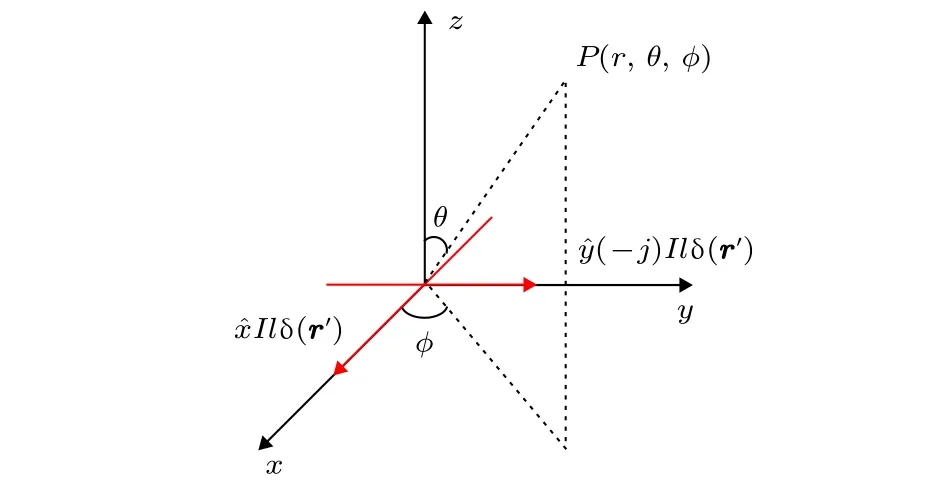
图5 正交电偶极子的坐标系Fig.5.Coordinate system of the orthogonal electric dipoles.
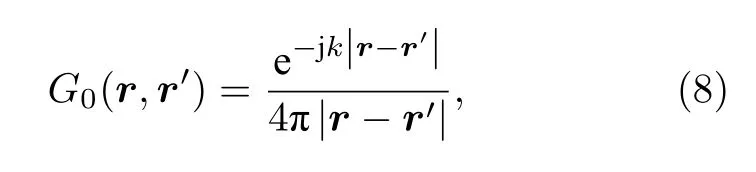
这里k表示介质的波数,具有普遍性,适合有损介质其中b为相移常数,为衰减系数,分别是介质的磁导率和介电常数.将(7)和(8)式代入(6)式,并考虑x向和y向电流元的狄拉克函数模型,得到

对(9)式进一步化简,得
将(10)式在球坐标系下求解,得自由空间中x向和y向电流元电场的精确解析表达式:

由 ∇×E=−jωµH,可得到对应的磁场为
因此,旋转电偶极子产生的电场和磁场为

根据电磁场对偶原理[21],由空间正交电偶极子的电磁场可以得出空间正交磁偶极子的电磁场,因此,旋转磁偶极子(图3)产生的电磁场为
(13)和(14)式中,下标“e”和“m”分别对应电偶极子和磁偶极子.在计算(14)式时,Iml=jωµ0I×(πR2),(14)式在形式上与文献[13]的表达式相同,区别在于首项系数不同.第2节已给出NdFeB永磁体的表面束缚电流密度Jm=624259 A/m,该永磁体可用I=1700 A,R=170 mm的电流环等效.由Jm=Br/µ0计算对应永磁体的剩磁Br≈ 0.8 T,其体积V=270 cm3,将Br和V代入文献[13]的表达式,将计算结果与(14)式进行比较.以水平面磁感应强度 |Bφ| 为例,两种计算方法的对比如图6所示,可以看出一致性很好,从而验证了(14)式的正确性.
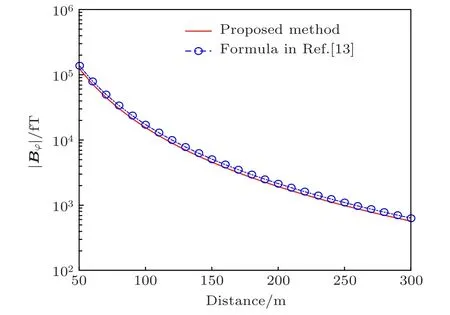
图6 两种计算方法的结果对比(沿x轴,球坐标变量为φ=0◦,θ=90◦)Fig.6.Results comparison between the proposed method and the formula in Ref.[13](along x-axis,the spherical coordinate parameters: φ=0◦ ,θ=90◦).
4 仿真分析
4.1 近区磁场变化特性
当旋转永磁体发射超低频电磁波时,通常用磁棒天线作为接收传感器,而磁棒天线一般水平放置,因此本文认为,磁感应强度的水平分量Bφ是接收的主要分量.这里,NdFeB永磁体的剩磁Br为0.8 T,外形参数为30 mm×30 mm×300 mm.当转速为9600 r/min时,发射的电磁波频率为160 Hz,当无限大介质是空气时,对应的波长l=1875 km.参考图5的坐标系,在无限大自由空间的xoy平面上,Bφ随距离的变化趋势如图7(a)所示.可见,当距离r超过0.15l(281 km),场强Bφ的精确计算结果随1/r项变化,此时,进入远场区域.当距离r小于0.15l时,属于近场区域,即Bφ随1/r3变化.图7(b)给出了在无限大海水空间中的计算结果,这里160 Hz对应的海水波长为125 m,可见在0.5l时,产生的Bφ随1/r项变化,进入远场区域.由于海水是有耗介质,其波数k是复数,且出现了距离衰减因子α,因此图7(b)中的四条曲线没有共同交点.在海水中,当距离小于0.05l时,场强随1/r3变化; 在海水中场强随距离的衰减规律存在一个过渡带,在图7(b)中,该过渡区域为0.05λ— 0.4λ之间,在此区间,场强变化需要精确计算,用近场或远场近似均会产生分析误差.
如果改变介质属性,频率不变,图8(a)给出了空气、土壤和海水三种不同介质中场强变化曲线.这里,取土壤的相对介质常数εr=4 ,电导率σ=0.015 S/m; 海水的εr=81 ,σ=4 S/m.可见,空气和土壤中,旋转永磁体产生的时变场的变化趋势大体相同,但海水中场强衰减剧烈.从图8(a)可见,在空气和给定参数的土壤中,1000 m的磁感应强度在10 fT以上,如果假设磁场接收传感器的灵敏度为1 fT,则该NdFeB旋转永磁体可用于1 km的近场通信.而在海水中,当距离为250 m时,磁感应强度快速衰减到1 fT,通信距离明显缩短.
如图8(b)所示,改变旋转永磁体的转速,从1800 r/min增加至30000 r/min,对应频率为30—500 Hz,Bφ的衰减随频率升高而增加.频率为500 Hz时,在160 m的距离上,磁感应强度为1 fT,如果频率降低至30 Hz,场强达到1 fT的距离可以增加至470 m.可见,若要增加可用距离,可以考虑降低转速,降低工作频率.但频率过低,导致带宽变窄,因此在应用时需要综合考虑,可以选择合适的转速,通过增加永磁体的剩余磁感应强度Br和体积V,即增加磁偶极矩,达到扩大可用距离的目的.
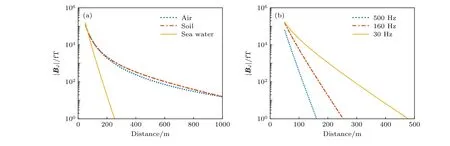
图8 旋转永磁体磁感应强度的一般变化规律 (a) 160 Hz; (b) 海水Fig.8.Variation of simulated magnetic flux density |Bφ| with material and frequency: (a) 160 Hz; (b) seawater.

图7 旋转永磁体的磁感应强度 |Bφ| 随距离的变化 (a) 空气; (b) 海水Fig.7.Simulated magnetic flux density |Bφ| versus distance: (a) Air; (b) seawater.
4.2 永磁体阵列对近场的调控效应
旋转永磁体的磁场强度随距离快速衰减,如果要增加场强,可以增加剩余磁感应强度Br和体积V,但这种方法要克服永磁体在旋转过程中的机械应力问题.为此,可用小尺寸旋转永磁体组阵,通过场的空间合成方法增加近区场强,调整阵元间距和初始旋转角,可对场分布特性进行灵活调控.以二元阵为例,两个永磁体沿x轴放置,如图9所示,永磁体之间的距离为d,两个永磁体之间初始旋转角的差值为 ∆φ.在计算近场分布时,场点P距离每个永磁体的距离和方位角度均不同,这是与传统天线阵远场计算方法的本质区别.图9给出了旋转永磁体二元阵在xoy平面上的水平磁场分量Bφ的近场方向图曲线.在计算中,d=50 m,f=160 Hz,r=1000 m,两个永磁体的初始旋转角相同,即图9中 ∆φ=0°.由仿真曲线图10(a)可见,单个旋转永磁体在2500 m的距离Bφ达到1 fT,而永磁体二元阵可在距离3000 m的位置,使合成的水平磁场分量达到1 fT,增加了场强有效覆盖距离.当永磁体间距d=50 m时,永磁体阵列和单个永磁体的水平面磁场分量在近场均呈现出全向分布特性,如图10(b)所示,但旋转永磁体阵列的磁感应强度由15 fT增加至30 fT,相当于在1000 m的距离上增加了3 dB.图11给出了俯仰面yoz平面上磁场分量Bθ的变化曲线,在计算中,其他参数保持不变,仅改变间距d,近场合成的方向图形状发生变化.当d=100 m时,俯仰面方向图呈现cosq的变化趋势,而当d逐步增加至500 m时,方向图逐渐展宽,z轴指向的磁感应强度降低,当d=500 m时,最大值发生在θ=±45◦的方向.由于两个旋转永磁体的初始旋转角相同,因此,这种方向图的变化并非相位引起,主要是由两个永磁体在场点P处的幅度衰减特性不一致引起.
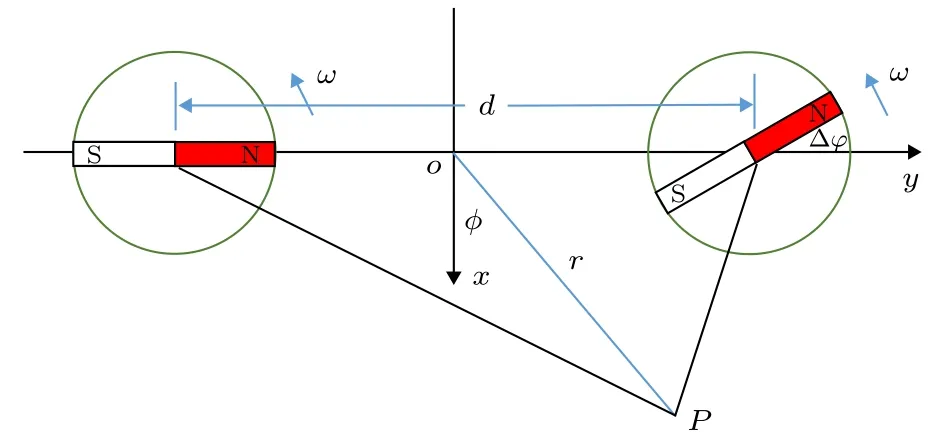
图9 旋转永磁体二元阵列Fig.9.Spinning permanent magnets array with two elements.
如果使永磁体之间的初始旋转角存在差值,即∆φ=0◦,相当于给不同永磁体的场分布引入了相位差.永磁体近场衰减量受场点至源点的距离影响很大,在图9中,在不同的场点方位角ϕ,两个永磁体在磁场合成时,给予了不同的幅度加权,∆φ的引入进一步增加了相位加权.因此,与 ∆φ=0◦的情况不同,这里近场分布方向图受到幅相双重加权.当阵元间距d=300 m,f=160 Hz时,图12给出了两个旋转永磁体在空气中的近场合成方向图.图12(a)为距离1000 m的计算结果,可见当调整 ∆φ时,1000 m处的近区磁场方向图逐步具有方向性,ϕ=0◦方向的磁感应强度逐渐降低,由30 fT左右降低至10 fT左右,而ϕ=180◦方向的磁感应强度基本不变.图12(b)为距离2000 m的计算结果,可见调整 ∆φ=150◦时,水平面的磁感应强度在ϕ=0◦方向产生了方向图零点,对该方向产生磁场信号抑制效应.仿真表明,如果旋转永磁体单元之间的距离过小,则合成的近场分布方向图形状基本不变,但磁感应强度具备增强效应; 如果距离过大,可以改变合成场的方向图形状,但磁感应强度未必增强,因此实际应用时,需要折中设计.与单个旋转永磁体相比,永磁体阵列用于超低频信号发射,在场强增强和方向图控制方面更加灵活.

图10 二元旋转永磁体和单个旋转永磁体的场强对比 (a) 沿x轴,球坐标变量为 φ=0◦ ,θ=90◦ ; (b) 近场水平面方向图(d=50 m,r=1000 m,∆φ=0◦)Fig.10.Performance comparison between spinning magnet array and single spinning magnet: (a) Along x-axis,the spherical coordinate parameters φ=0◦ ,θ=90◦ ; (b) magnetic near field pattern at the horizontal plane (d=50 m,r=1000m,∆φ=0◦).
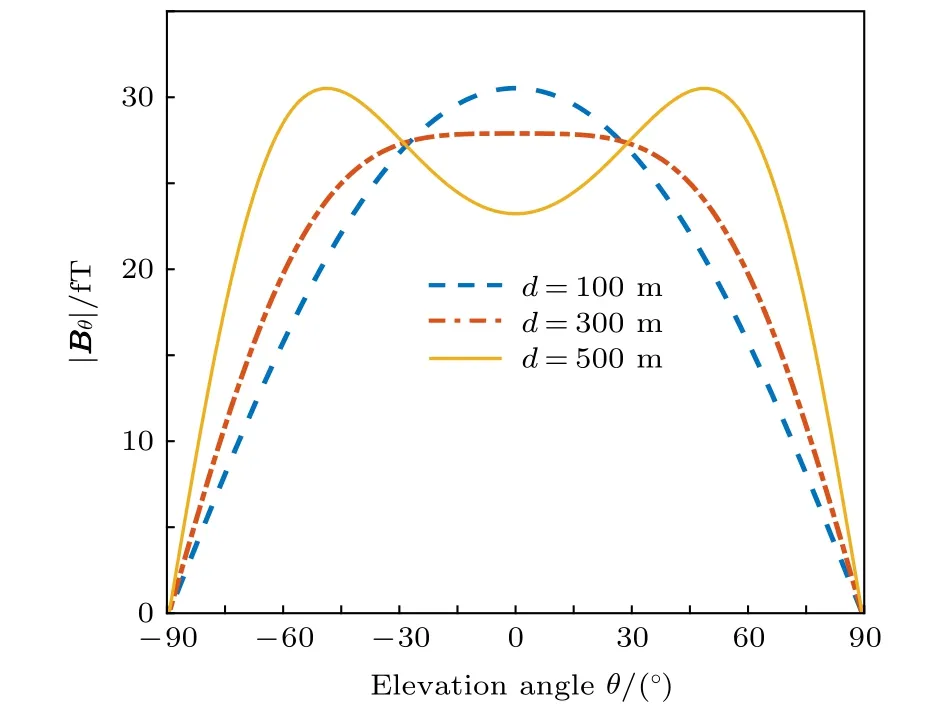
图11 二元阵列俯仰面磁场分布Fig.11.Simulated magnetic flux density |Bθ| in the elevation plane.

图12 改变初始旋转角,二元阵列的水平面磁场方向图(a) r=1000 m; (b) r=2000 mFig.12.Simulated magnetic flux density |Bφ| of the spinning magnet array with two elements: (a) r=1000 m; (b) r=2000 m.
5 结 论
本文研究了超低频机械旋转永磁体的空间电磁特性.与文献已报道的研究工作相比,本文基于并矢格林函数,详细推导了用于旋转永磁体空间电磁计算的解析表达式,与文献[13]对比,结果基本一致,说明本文给出的场强计算模型可用于旋转永磁体空间场强的预测.本文以NdFeB永磁体(30 mm×30 mm×300 mm)为例,其剩余磁感应强度Br≈ 0.8 T.当其转速为9600 r/min时,产生的时变电磁场频率为160 Hz,在1000 m的距离上,磁感应强度约为15 fT.如果磁场传感器的接收灵敏度为1 fT,则机械旋转永磁体可用于近场通信.如果将旋转永磁体置于海水中,受海水衰减影响,磁感应强度为1 fT的距离仅为250 m,如果要增加距离,需要降低机械转速.如果将旋转永磁体组成二元阵列,选择合适间距,可使二元永磁体阵列在近场产生全向方向图,但磁感应强度能增加3 dB.如果进一步调整阵元初始旋转角,使∆φ=0◦,相当于对二元永磁体阵列近场方向图进行幅度和相位的双重调控,可在不同的近场距离上,改变方向图形状,产生方向性或者方向图零点.机械旋转永磁体有望改善超低频天线尺寸和辐射效率之间的矛盾,以便携方式用于近区磁场通信.本文研究工作为后续进一步开展旋转永磁体的实验研究打下了理论基础.