基于窄带物联网的时间估计算法
2019-10-09余晶
文/余晶
窄带物联网(Narrow Band Internet of Things, NB-IoT)成为万物互联网络的一个重要分支。NB-IoT构建于蜂窝网络,只消耗大约180kHz的带宽,可直接部署于GSM网络、UMTS网络或LTE网络,以降低部署成本、实现平滑升级。NB-IoT支持三种频率部署方案:In-band(带内部署)、Guard band(保护带部署)和Stand alone(独立部署)。因此,它可以利用已有的频谱资源,很好的与现有的网络共存。
NB-IoT具有以下特点:
(1)广覆盖。它能改进空间的的覆盖,在同样的频段下,NB-IoT比现有的网络增益 20dB;
(2)具备支撑海量连接的能力。NB-IoT的一个小区能支持约 10 万个连接;
(3)三是实现低功耗。NB-IoT终端模块进行正常通信和待机的电流是 mA 和 uA 级别,模块待机时间可达十年。
NB-IoT 的这些特点,随着移动通信的发展,各种智能硬件的普及,万物互联必将是未来的趋势。
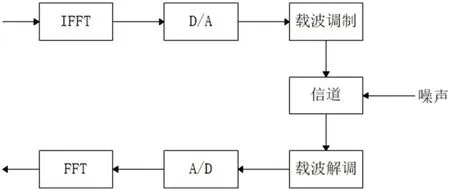
图1:通信系统模型
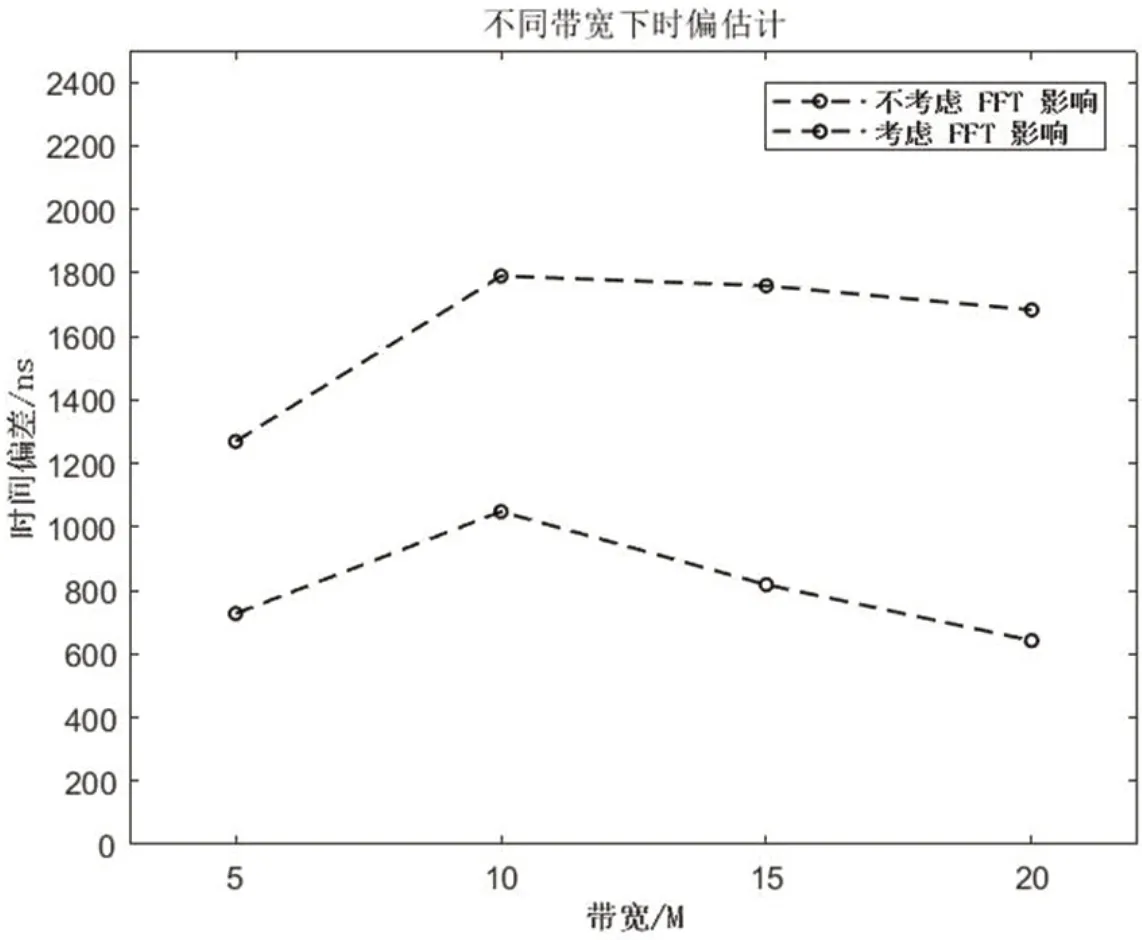
图2:不同带宽下时间估计
在 NB-IoT网络中,对 UE 进行精确定位,前提是进行高精度的时间估计。由于无线资源环境的复杂,有的用户设备处在噪杂的闹市区,有的处在地下通道,有的正在频繁移动。而信号在传输的过程中又存在多径干扰,使得时间估计存在误差,从而影响基站对 UE 进行精确定位。为了避免小区内的干扰,基站要求同一子帧的不同 UE 到达基站的时间基本对齐。因此时间估计技术显得尤为重要。NB-IoT 是基于正交频分复用 (Orthogonal Frequency Division Multip lexing, OFDM) 系统。OFDM具有抗符号间干扰能力, 可以将信道均衡从复杂的时域处理转化到简单易可行的频域处理。
1 上行NPUSCH信道简介
1.1 NPUSCH信道资源介绍
1.2 帧结构
LTE定义了一个基本的时间单位 Ts= 1/(15000 * 2048) = 1/30720000秒。该 时间单位可以看作是基于FFT(Fast Fourier Transform,快速傅里叶变换)且FFT大小等于2048的发射机/接收机所使用的采样时间。在时域上,上下行传输都被组织成10ms的系统帧(system frame)。LTE支持2种系统帧结构:用于FDD的类型1和用于TDD的类型2。本文仅探讨 FDD的类型1帧结构形式。
2 时间估计算法
2.1 上行基带信号处理
数字通信系统是利用数字信号来传递信息的通信系统,如图1所示。数字通信系统的技术问题很多,其中主要有信源编码与译码、信道编码与译码、数字调制与解调、同步以及加密与解密等。其中同步是非常重要的一个环节,目的是使收发两端的信号在时间上保持步调一致,是保证数字通信系统有序、准确、可靠工作的前提条件。
表1:, ,和组合
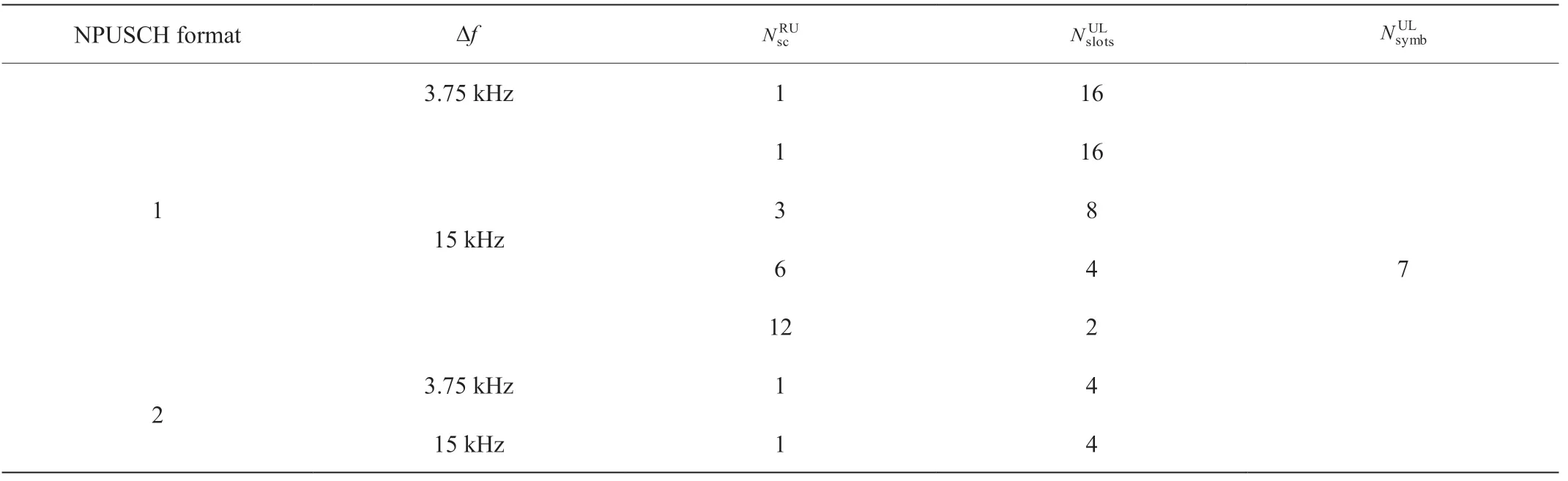
表1:, ,和组合
NPUSCH format 3.75 kHz 1 16 1 15 kHz 16 3 8 6 4 12 2 1 7 2 3.75 kHz 1 4 15 kHz 1 4
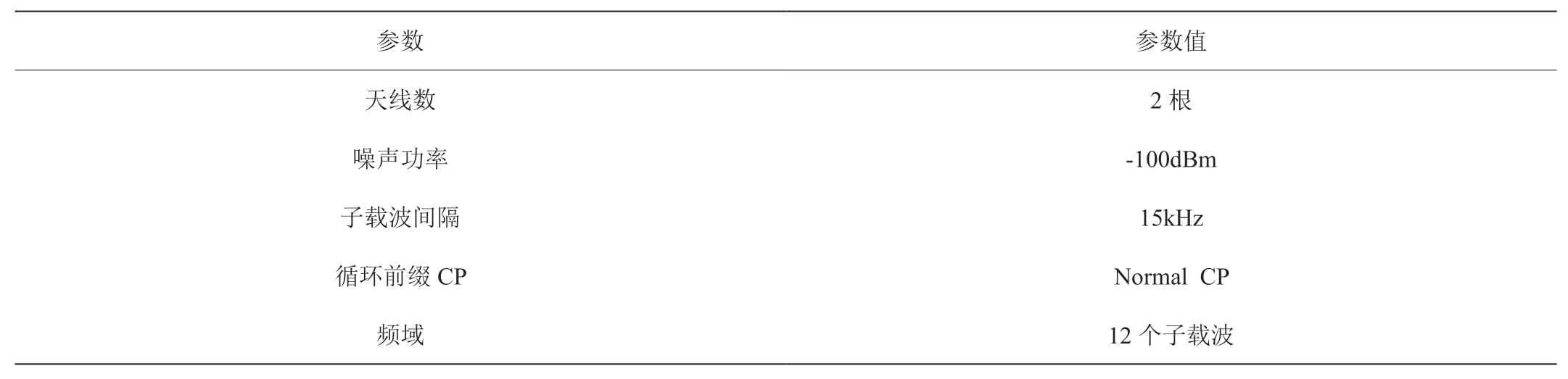
表2:仿真信道参数设置
基站从天线侧接收到的原始基带信号,依次经过解调、模数转换、频率与时间同步,通过傅里叶变换将时域信号转变成频域信号。然后依次经过解调参考信号、原始的信道估计、噪声估计、均衡、解扰、解交织、速率匹配等过程最终变成可供处理的软比特数据。
2.2 时间估计算法实现
2.2.1 时间偏差产生原因
若发送信号严格符合奈奎斯特准则,则符号之间不存在码间串扰。理论上采样时刻正确才能够保证没有码间干扰。而实际由于 UE 与基站收发端采样时钟频率存在偏差,因此采样时间偏差不固定,需要不停的修正、跟踪采样时间偏差。分为两种情况:采样时钟频率相同,而采样点时间存在偏差,收端采样点与发端正确采样点存在固定时间偏差δ;收发端采样时钟频率偏差,收端采样点与发端正确采样点的偏差随时间变化。
2.2.2 初始角度估计
将此 PRB 的 12 个子载波,以间隔为 4 分割,可得到 8 组值。然后根据原始的信道估计值将它们求和,可求得累计旋转角度:由于每根天线收到的值不一样,需要将所有天线的值分别计算。
2.2.3 角度估计值修正
基站在从天线处收到信息后,需要做傅立叶变换,将时域数据变换到频域数据。而做一次傅立叶变换将耗费一些时间。在基带信号采样后,基带信号的角度不会发生变化,但真正对基带信号进行处理是在傅立叶变换之后。我们需要考虑这个时间差对相位旋转产生的影响,需要将这个值补偿回来。做傅立叶变换一般采用硬件来做,对于不同的硬件做一次时间 FFTTimeShift 是固定的。由于子载波间隔 fsc=15kHz,以 ScDistance=4个子载波距离进行角度估计。那么需要校准的角度为 RotatorCorrection=e-i2π*FFTTimeShift*fsc*ScDistance,然后 arctan (RotatorCorrect )可 求 出需要修正的实部 RotatorCorrectionReal和虚部 RotatorCorrectionImag。
一般通信基站都配有好几根天线,每根天线由于信噪比 SNR 不一样对信号的贡献值是不一致,在进行时间估计时需要考虑不同天线对信号贡献的权值影响。修正算法如下所示:
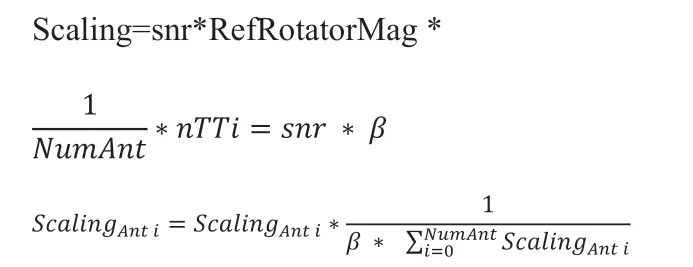
考虑到不同天线对初始估计相位值的影响,需要按天线将RotatorEst值修正。然后将每根天线对相位估计值做合并,得到修正后的相位估计值 ScaledRotatorEst。

最后需要将做傅立叶变换所带来的相位差做修正,分别求出时间估计值。
2.2.4 时间估计值计算
根据修正后得到的最终时间估计值,分别计算幅度、角度。可得到最终的时间估计值。

3 仿真结果
本次的实验基于诺基亚通信基站仿真平台构建。首先进行环境的准备,分别仿真在不考虑傅立叶变换所带来的时间开销,不同的信噪比情况下对 UE 时间估计的影响。由于不同的通信带宽,所做傅立叶变换的采样点不一,那么所花费的时间也不一致,这也是所需要考虑的。仿真信道参数设置参照表2。
在 AWGN 高斯白噪声固定情况下,分别对带宽为 5M,10M,15M,20M的 UE 进行仿真测试。仿真结果如图2。在不同带宽条件下,分别做快速傅立叶变换,然后进行采样。带宽为 5M,10M,15M,20M 采样点数分别为 256,512,1024 和2048 。显然所耗费的时间也是不一样的。从图中可看出,随着带宽的递增,两者的时间估计差递增。在考虑做 FFT 所带来的影响,仿真结果明显优于不考虑 FFT 的情况。这说明,做快速傅立叶变换所带来的相位差误差不可忽略。在带宽为 20M 的情况,仿真结果最好,带宽为 10M,仿真结果最差。但它们的时间估计值均在 1 微秒范围内,都可以满足窄带物联网对 UE 时偏估计的要求。
在实际的环境中,信噪比往往错综复杂,是一个不可忽略的因素。在带宽为 20M 情况下,分别对基于不同信噪比情况下进行仿真。在 信 噪 比 为 -5dB、-3dB、-2dB,-0.7dB和 3dB 情况下,仿真结果分别为结果分别为:131ns、 255ns、227ns、642ns和240ns。在信噪比为 -0.7dB 情况下,估计值稍大,其它信噪比情况下,结果相差不大。估计值均小于 1 微秒,完全满足窄带物联网对时间估计的要求。
4 结语
仿真结果如下:基站从天线端口收到信号,然后进行快速傅立叶变换,对时间估计所带来的影响是不可忽略的。在对 UE 进行时间估计时,由于不同天线具有不同的信噪比环境,需要综合考虑不同天线所贡献的权值。最终结论,在对 UE 进行时间估计时,基站做快速傅立叶变换和不同天线设置都会影响时间估计的结果。
