移动机器人自主导航矩阵二维码辅助定位研究
2019-10-08张安峰吴涛杨丛丛
张安峰 吴涛 杨丛丛

摘 要: 移动机器人自主导航过程中,为机器人提供精确地位置信息十分重要,只有机器人有了精确地位置信息才能准确地导航到目标点。由于单纯的惯性和里程测量系统的相对定位方式都不能消除长时间的累计定位误差,因此需要一种绝对位置信息加以辅助修正累计误差。二维码是一种很好的可以存储绝对位置信息的方式,且信息获取简单易用,本文提出了一种将矩阵二维码作为绝对位置标签辅助修正里程和惯性测量系统导航过程中产生的累计误差的导航定位方法。通过实验对比验证了该方法的有效性。
关键词: 移动机器人;二维码;自主导航;定位
中图分类号: TP242.6 文献标识码: A DOI:10.3969/j.issn.1003-6970.2019.06.042
本文著录格式:张安峰,吴涛,杨丛丛. 移动机器人自主导航矩阵二维码辅助定位研究[J]. 软件,2019,40(6):180184
【Abstract】: In the autonomous navigation process of mobile robots, it is very important to provide accurate position information for the robot. Only the robot has accurate position information to accurately navigate to the target point. Since the simple positioning of the inertia and the odometer measurement system cannot eliminate the long-term cumulative positioning error, an absolute position information is needed to assist the correction of the accumulated error. The QR code is a good way to store absolute position information, and the information acquisition is simple and easy to use. This paper proposes a navigation and positioning method that uses the matrix QR code as an absolute position label to correct the cumulative error generated in the navigation process of the mileage and inertial measurement system. The effectiveness of the method is verified by experimental comparison.
【Key words】: Mobile robot; Two-dimensional code; Autonomous navigation; Positioning
0 引言
现代科技技术发展迅速,各类传感器产品技术稳定且精度不断提高,致使一些依赖各类传感器的新兴技术发展迅速。其中移动机器人就是一个典型的代表,近几年,成为了国内外及各大高校的研究热点。其中主要包括SLAM(同时定位与建图)、自主导航、定位等[1]。不同环境机器人的定位方法分为相对定位和绝对定位,相对定位主要通过里程测量和惯性导航技术[2],主要传感器为惯性测量(IMU)传感器和电机编码器等。室外机器人的绝对定位主要通过GPS辅助机器人定位[3],而对于室内机器人,则需要借助绝对位置传感器如RFID、RSSI、UWB、WIFI、激光、视觉等技术来辅助机器人获得绝对位姿,这类传感器不仅仅应用于机器人[4-6],在其他室内定位方面也同样适用[7-9]。
现如今,标签式辅助定位非常流行,因为相比于前面提到的室内绝对定位方式,标签式辅助定位其信息获取较为简单,且成本低。最为流行的是二维码标签,他可以存储我们需要的机器人的绝对位姿。二维码技术现在已经应用于我们生活的方方面面,但对于工程上应用现在还是处于研发阶段。现在主要研究的方面有二维码辅助定位[10,11]、二维码追踪[12]、二维码目标搜索识别[13]等领域。Alves P, Costelha H, Neves C[14]等人将环境中天花板上的灯具作为标签,不需要人为改变环境,应用起来较为容易,但是对于灯具的识别过程中其稳定性相对于二维码标签较差。Rusdinar A, Kim S[15]定义了人工地标,通过对自然特征进行实时的图像处理从而达到自主导航定位目的。
本文的研究是在里程和惯性测量系统的相对定位基础上通过矩阵二维码辅助修正相对定位累计误差的导航方法。Cho B S, Moon W[2]等人通过结合惯性导航和里程测量系统设计了一种卡尔曼滤波器进行数据融合从而获得相对于任意单系统更精确的位置信息。但是此方法仍然无法消除长时间累计误差。Zhang H, Zhang C[10]等人通過将二维码整齐排列粘贴在天花板上,在机器人上配备一个指向天花板的工业摄像头,读取二维码位置信息从而估计出机器人的姿态,但是该方法对环境光的要求较高,当环境突然发生变化或在黑夜环境中,该方法将会失效。Chiou Y S, Tsai F[11]等人提出了一种惯性测量单元(IMU)与二维码相结合的定位方案,该方法有效降低了惯性测量单元定位累计误差,由于惯性测量单元加速度计是通过双重积分获取位姿信息,所以其相对定位精度效果没有里程测量单元精确,但里程测量单元又受物理条件影响较大。因此本文做了只使用里程测量单元、同时使用里程测量、惯性导航单元和使用二维码辅助里程测量、惯性导航单元自主导航定位三种情况的对比试验,验证了二维码辅助里程测量惯性导航单元自主导航定位的有效性。
1 系统结构
本文采用的实验平台是用轻铝型材搭建的简易两轮差速移动机器人,如图1所示。本实验平台配备有带增量式编码器的伺服电机,通过编码器可以获得车轮的里程测量信息从而提供机器人的位置信息;4轴惯性测量元件(IMU)包含3轴加速度计和Z轴陀螺仪,因为本实验针对平面环境的机器人运动,因此主要位姿包括(x、y、yaw)x、y位置以及偏航角(yaw)姿态,所以选用的是4轴惯性测量元件,主要提供机器人的姿态信息;P+F公司的二维码视觉读码器,如图2所示,该读码器可以实时读取矩阵二维码中的信息,而且带有辅助光源,避免了光照条件和黑夜环境的不适用性,其中读码器可以获得矩阵二维码标签值和二维码读头相对于二维码中心点的位置偏差及角度信息,这正是我们所需要的绝对位姿信息。
本实验平台的的整个软件开发环境都是在装有Ubuntu16.04的电脑上实现的,是基于ROS系统开发的。其中涉及到RS232、RS485、CAN等串口网络通讯方式,4轴惯性测量单元(IMU)采用的是RS232通讯方式,二维码读码器采用的是RS485通讯方式,伺服电机则采用USB转CAN的通讯方式。实验中的矩阵二维码标签如图3所示,每一个矩阵二维码都存储了不同的标签值,对于位姿信息,每一个二维码都可以得到相对于二维码中心点的偏移距离以及相对于X轴的旋转方向。根据以上信息,确定机器人的整体系统控制架构如图4所示。将二维码的绝对数据分别与编码器里程测量数据和惯性导航测量数据进行融合得到机器人的准确位姿,从而控制左右轮转速,实现精确的自主导航。
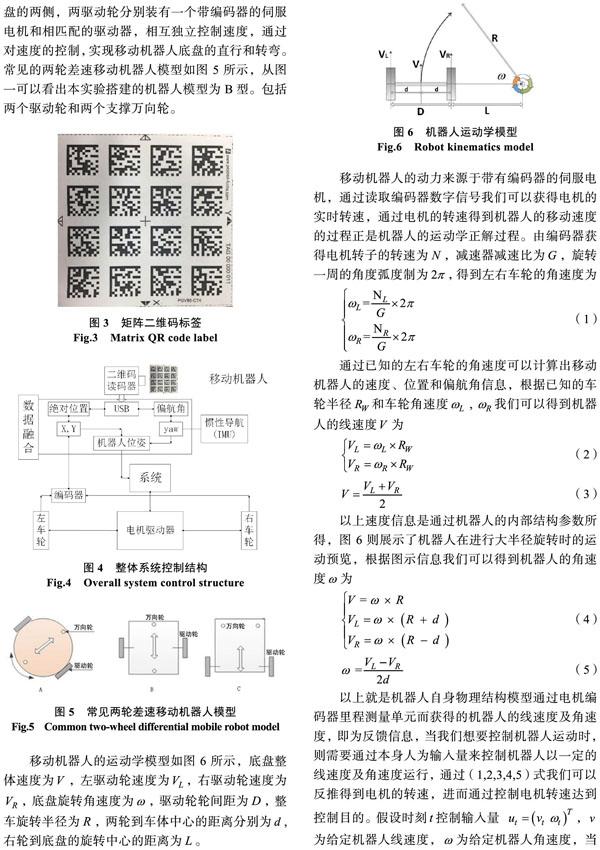
2 机器人模型
两轮差速移动机器人底盘主要由两个驱动轮和两到四个辅助支撑万向轮组成,驱动轮分别位于底盘的两侧,两驱动轮分别装有一个带编码器的伺服电机和相匹配的驱动器,相互独立控制速度,通过对速度的控制,实现移动机器人底盘的直行和转弯。常见的两轮差速移动机器人模型如图5所示,从图一可以看出本实验搭建的机器人模型为B型。包括两个驱动轮和两个支撑万向轮。
3 数据融合过程
在使用编码器的里程测量系统和惯性传感器测量系统中都存在相对累计误差,但误差来源不同,对于电机编码器的里程测量单元,由于其计算过程中将小车的曲线运动比喻为短时间的直线运动来求解,因此存在计算上的累计误差,同时物理模型并非理想化模型,因此也存在一定的结构性系统误差,对于惯性测量单元,其主要累计误差来源于积分过程,通过积分获得惯性测量单元的角度信息,其积分过程中常数的不确定性便是累积误差的主要来源。由于以上不可避免的累计误差在自主导航中对定位的影响将会不断扩大,使其不能长时间满足要求,所以本文采取了矩阵二维码辅助修正自主导航中的累计误差,可以长时间满足其定位要求。
实验中因为每一个二维码都可以储存不同的信息,我们所使用的二维码具有不同的标签值,通过程序为每一标签二维码定义其中心位置的绝对位置信息,通过激光测距仪将二维码准确地布置到程序所定义的现实环境中的绝对位置。如图7所示,每两个二维码间隔一米。
本次数据融合过程,没有用到卡尔曼滤波器,仅使用简单的数据结构替换方法同样达到了较好的鲁棒性,降低了对计算机性能的要求。
4 实验验证
本次实验我们借助ROS系统中的可视化RVIZ工具来实时显示机器人的轨迹信息,首先在仅使用里程测量单元的情况下,我们将机器人里程测量位置信息(红线)实时显示出来如图8所示,由图我们可以看出,在仅使用单里程测量单元的情况下,其机器人位姿累计误差较大,在经过第一个转角之后其方位角就出现了较严重的偏差,之后误差将持续累计,因此不能够满足定位要求及鲁棒性。
其次我们使用了里程测量单元和惯性导航单元,根据数据融合过程中加入陀螺仪数据的方法,得到如图9所示结果,陀螺仪的角度信息对里程测量单元的方位角起到了修正作用,当里程测量单元的轨迹如图中红线所示时,机器人在真实实验环境中的位置与蓝线基本重合,因此通过里程测量单元与惯性导航单元融合,对机器人导航过程中定位起到了较好的效果,但是长时间仍然会有不确定的累计误差。
最后我们在里程测量单元和惯性导航单元中引入矩阵二维码辅助修正累计误差,使其鲁棒性更佳,最终实验结果如图10所示,机器人真实轨迹如图中蓝线所示,图中方框所标记处为机器人每个转角处,矩阵二维码对其方位角起到了绝对的修正作用。验证了该方法的有效性。
5 结论
针对本次实验,其中还有很多需要改进的地方,由于每一种传感器都存在噪声,因此应该对每一传感器都应该进行高斯滤波处理,在今后的实验中可以通过扩展卡尔曼滤波对其数据进行融合处理,对比其实验效果。通过以上的三组实验,我们发现,在紧靠一种传感器的情况下,机器人自主导航很难达到预期效果,多传感器间的数据融合将是未来机器人自主导航中的主要发展方向。其中主要包括激光雷达、超声波、视觉、二维码、里程计、GPS等传感器。未来或许会出现更加精确地定位传感器技术,并且如今计算机的计算通讯能力也在不断提高,我相信未来的机器人自主导航技术定会有质的飞跃。
參考文献
[1] Thrun S, Burgard W, Fox D. Probabilistic robotics[M]. MIT press, 2005.
[2] Cho B S, Moon W, Seo W J, et al. A dead reckoning localization system for mobile robots using inertial sensors and wheel revolution encoding[J]. Journal of mechanical science and technology, 2011, 25(11): 2907-2917.
[3] Moore T, Stouch D. A generalized extended kalman filter implementation for the robot operating system[M]//Intelligent Autonomous Systems 13. Springer, Cham, 2016: 335-348.
[4] Royer E, Lhuillier M, Dhome M, et al. Monocular vision for mobile robot localization and autonomous navigation[J]. International Journal of Computer Vision, 2007, 74(3): 237-260.
[5] Choi B S, Lee J W, Lee J J, et al. A hierarchical algorithm for indoor mobile robot localization using RFID sensor fusion[J]. IEEE Transactions on industrial electronics, 2011, 58(6): 2226-2235.
[6] Biswas J, Veloso M. Depth camera based indoor mobile robot localization and navigation[C]//2012 IEEE International Conference on Robotics and Automation. IEEE, 2012: 1697-1702.
[7] Rantakokko J , Rydell J , St?mback, Peter, et al. Accurate and reliable soldier and first responder indoor positioning : multisensor systems and cooperative localization[J]. IEEE Wireless Communications, 2011, 18(2):10-18.
[8] Alghamdi S, Van Schyndel R, Alahmadi A. Indoor navigational aid using active RFID and QR-code for sighted and blind people[C]//2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing. IEEE, 2013: 18-22.
[9] Yang C, Shao H R. WiFi-based indoor positioning[J]. IEEE Communications Magazine, 2015, 53(3): 150-157.
[10] Zhang H, Zhang C, Yang W, et al. Localization and navigation using QR code for mobile robot in indoor environment[C]// 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2015: 2501-2506.
[11] Chiou Y S, Tsai F, Yeh S C, et al. An IMU-based positioning system using QR-code assisting for indoor navigation[M]// Computer Science and its Applications. Springer, Dordrecht, 2012: 655-665.
[12] Anezaki T, Eimon K, Tansuriyavong S, et al. Development of a human-tracking robot using QR code recognition[C]//2011 17th Korea-Japan Joint Workshop on Frontiers of Computer Vision (FCV). IEEE, 2011: 1-6.
[13] Xue Y, Tian G, Li R, et al. A new object search and recognition method based on artificial object mark in complex indoor environment[C]//2010 8th World Congress on Intelligent Control and Automation. IEEE, 2010: 6648-6653.
[14] Alves P, Costelha H, Neves C. Localization and navigation of a mobile robot in an office-like environment[C]//2013 13th International Conference on Autonomous Robot Systems. IEEE, 2013: 1-6.
[15] Rusdinar A, Kim S. Vision-Based Indoor Localization Using Artificial Landmarks and Natural Features on the Ceiling with Optical Flow and a Kalman Filter[J]. International Journal of Fuzzy Logic and Intelligent Systems, 2013, 13(2): 133-139.
