一种三自由度采摘机械爪设计
2019-10-08张新景史颖刚
王 勇 张新景 史颖刚
(西北农林科技大学机械与电子工程学院,陕西 咸阳 712100)
鲜食番茄具有巨大的需求量和产量,人工采摘效率低下和人工采摘成本极大影响着鲜食番茄的市场价值[1,2],用于深加工的番茄采摘已经实现了机械化,而用于鲜食的番茄由于采摘难度大仍未实现机械化。番茄采摘机器人的研究与应用,一方面可以提高采摘效率,避免由于采摘不及时导致番茄腐烂;另一方面可以减少番茄采摘过程中人工的参与,进而降低番茄生产成本[3,4]。机械爪采摘时与番茄直接接触,是采摘机器人实现番茄采摘的关键末端执行部分,因此直接影响着鲜食番茄果实表面品质。本文主要基于农业机器人技术,针对标准化温室番茄采摘自动化问题,设计一种三自由度采摘机械爪。
1 鳍条效应原理
鳍条效应[5]是生物学家Leif Kniese在捕鱼时发现的,鱼鳍由2个排列成“V”形的骨头和其间的结缔组织构成,拉动“V”的一侧会导致鱼鳍变形,如图1所示。当鱼鳍的一侧受到外力作用,该力导致结构的侧面弯曲,使得基部和尖部朝施加的载荷方向弯曲。由于鳍条效应的效果可扩展,且功能多样性,被广泛应用在各种夹具上。本文基于鳍条效应,设计了一种三自由度采摘机械爪。
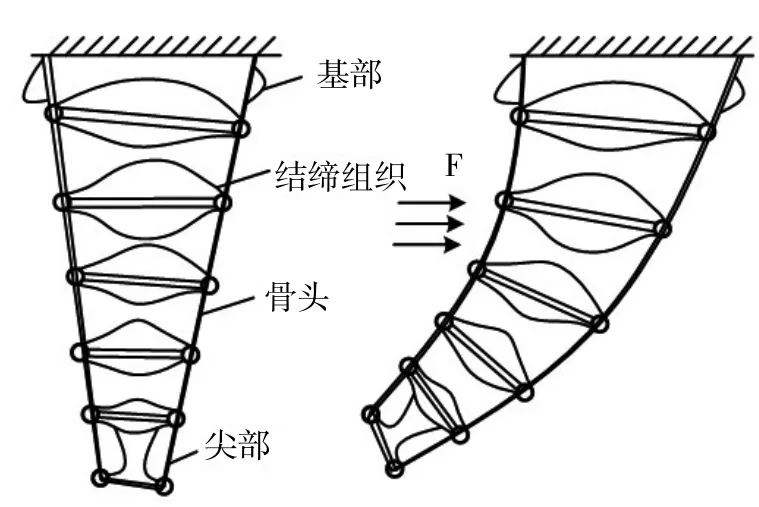
图1 鳍条效应示意图
2 机械结构设计
Whitney等基于鳍条效应设计了一个两自由度柔性手爪,通过2个伺服电机,将手爪向下推到一起,夹取效果良好,但夹取速度较慢[6]。故本文基于鳍条效应,设计三自由度机械爪,结构简图如图2所示,每个关节由舵机直接控制,提升抓取速度。
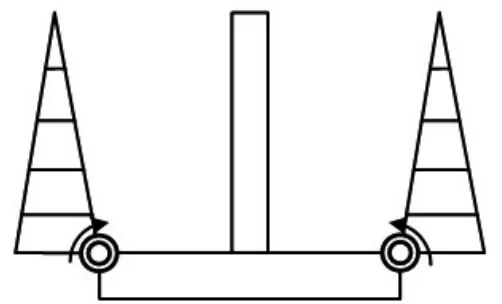
图2 三指采摘机械爪结构简图
采摘机械爪三维图如图3所示,包括鳍条效应器、鳍条效应器支架、双轴舵机和手掌,双轴舵机通过舵盘与效应器支架固连,鳍条效应器安装在支架的沟槽内。该鳍条效应器主要由2个一端固定在一起的纵向边缘纤维骨架和位于两主骨架间的小横向纤维组成。纵向骨架和横向骨架间通过柔性连接,以保证他们之间可以相互移动。该结构简单、质量轻且强度大,能自适应所抓物体的外形。为了采摘番茄等类圆形,同时使机械手作业时对果蔬的损伤降至最低,鳍条效应器采用TPU柔性材料,利用3D打印技术完成制作。

图3 采摘机械爪三维图
采摘机械爪采用3个数字舵机,选用LOBOT生产的LD—220MG数字舵机,其采用PWM脉宽调节角度,周期20 ms,占空比0.5~2.5 ms的脉宽电平对应舵机0°~180°,且呈线性关系,其性能参数如表1所示。

表1 LD—220MG数字舵机性能参数
3 运动控制系统
通过单片机的定时器的精准定时及GPIO可以实现舵机的控制,但是3个舵机均用单片机控制会占用较多的单片机资源,增加设计难度。因此,本文采用LSC—16舵机控制器,利用上位机调试舵机转动速度和角度,控制舵机按照预先调试好的动作组运行。舵机控制器采用串口通信,通信参数为波特率9600,停止位1位,数据位8位,无奇偶校验位。其接受数据帧格式如表2所示。

表2 数据帧格式
该舵机可采用2种控制方式,在单舵机控制模式时,Prm1,需控制舵机的个数;Prm2,时间低八位;Prm3,时间高八位;Prm4,舵机ID;Prm5,角度低八位;Prm6,角度高八位。
本文采用动作组控制模式,Prm1,要运行的动作组的编号;Prm2,动作组要运行的次数低八位;Prm3,动作组要运行的次数高八位。本文需使用舵机控制器实现2个动作组的运行,但考虑到程序的可扩展性,设计舵机控制程序,可调用3个动作组,其控制程序流程如图4所示。首先,创立3个长度为8的一维数组,分别配置3个数组为调用动作组1、2、3的指令。然后,进入条件选择语句,串口发送相对应的数组数据。
4 结语
根据温室大棚番茄采摘的实际需要,笔者搭建了采摘机械爪样机,如图5所示。作业时,舵机带动机械爪的开闭,当机械爪闭合时若继续受到驱动力,鳍条效应器即会内收形成包络面,实现对番茄的包络抓取。通过对舵机转动速度和角度的控制以及鳍条效应器柔软的材料可有效减小果蔬所受压力,降低了番茄损伤率。本文所设计的机械爪基本能完成采摘任务,但由于时间、实验设备等方面的限制,还需要对采摘机械爪进行进一步研究、设计及优化。

图4 舵机动作组控制程序流程图

图5 采摘机械爪样机