食品快速解冻装置温湿度控制系统的设计∗
2019-10-08王安敏刘言昭
王安敏 刘言昭
(青岛科技大学机电工程学院 青岛 266061)
1 引言
随着国家经济水平的提高,人们对健康生活理念越来越重视。合理搭配饮食营养,做出色香味俱佳的精美食物,让我们更健康,更有活力,这就对烹饪的用料提出了更加严格的要求。传统的解冻方式解冻时间慢,食品的品质差。快速解冻装置可以快速解冻,提高解冻后的食品质量。快速解冻装置以STM32f103为控制核心,STM32F系列属于中低端的32位ARM微控制器,该系列芯片是意法半导体(ST)公司出品[1]。其内核是Cortex-M3,该系列芯片按片内Flash的大小可分为三大类:小容量(16K和 32K)、中容量(64K和 128K)、大容量(256K、384K 和 512K)、芯片集成定时器、CAN、ADC、SPI、I2C、USB、UART[2~6]。采用AM2302温湿度传感器测量解冻箱体内空间温湿度,AM2302数字温湿度传感器采用专业的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性与卓越的恒久稳定性[7]。
2 工作原理设计
该装置由加湿器1、解冻架2、红外冷冻肉4、负离子发生器5、温度传感器6、温湿度传感器7、出风口8组成。将食品放置到解冻架后,由红外管通电加热,温度传感器DS18B20测量中心温度,温湿度传感器AM2302测量箱体空间温湿度,在解冻的过程中要时刻的检测箱体空间温湿度,与设定值对比,检测定值作为增量式PID算法的输入值,经由增量式PID算法计算出每个周期内所需红外管所要加热的值,通过差值算法确定加热的总时间,装置内的湿度在加热的过程中由超声波雾化加湿装置进行加湿,在加湿的过程中由增量式PID算法计算出每个周期内加湿装置的工作时间,其中红外管与超声波雾化加湿装置的通断由继电器控制,装置的结构如图1所示。

图1 快速解冻装置结构图
3 温湿度控制
3.1 温湿度检测电路
该装置采用DS18b20测量表面温度和中心温度,控制电路如图2,DS18b20测温简单,只需要一根线就可以完成测温,可以实现多点测温。本装置使用了多个用于测量食品表面不同位置的温度与中心温度,有利于一个引脚测量多个点的温度,该装置采用AM2302进行温湿度的测量,控制电路如图3所示,其同样只需要一根线即可完成测温湿度的测量。
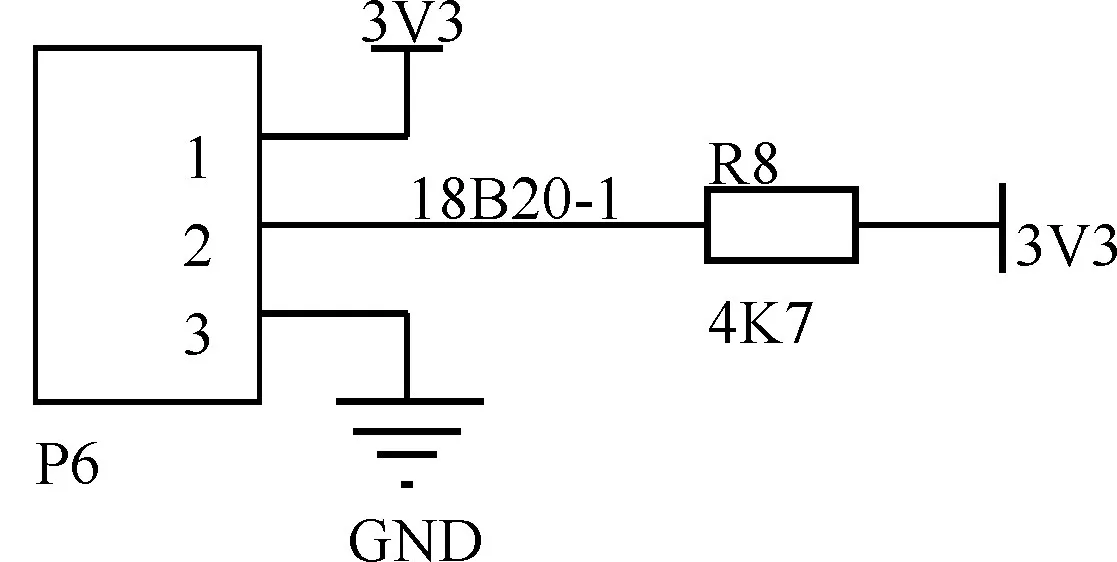
图2 DS18b20控制电路图

图3 AM 2302控制电路图
3.2 数字PID温、湿度控制
数字PID控制是控制系统中十分常用的控制方法,PID控制原理框图如图4。
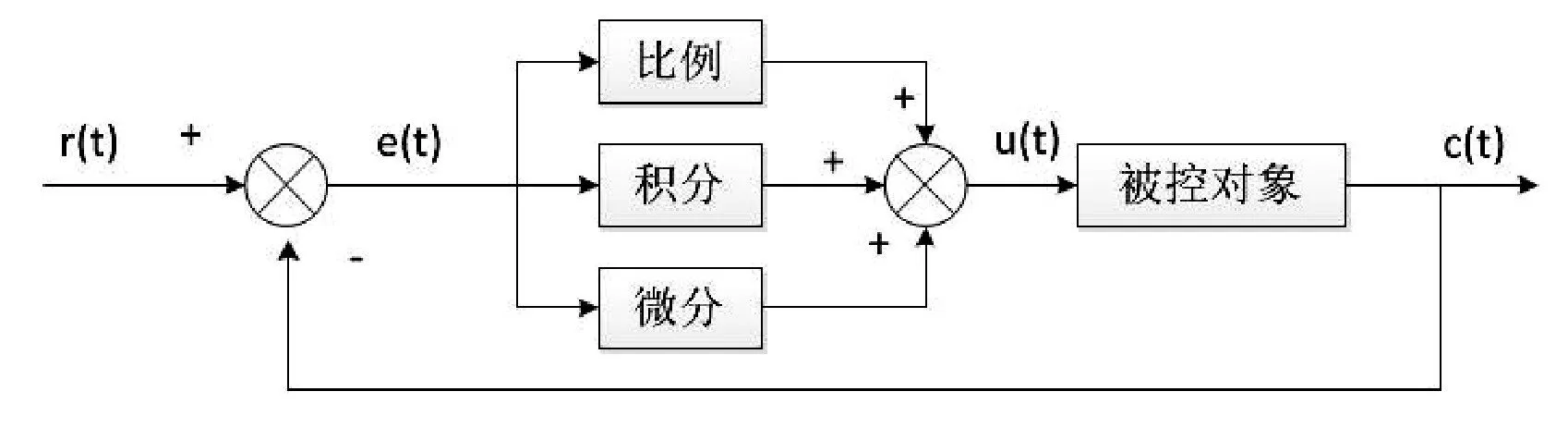
图4 PID控制原理框图
PID控制器是线性控制器,偏差e(t)由设定值r(t)与实际值c(t)构成。

将偏差的比例、积分和微分通过线性组合构成控制量,控制量输出为

由式(2)得PID控制规律传递函数为

(KP为比例系数;TI为积分时间系数;TD为微分时间系数。)
将模拟PID控制算法式(3)离散化,可得:


由式(5)可知,当微处理器使用恒定的采样周期T时,只要使用前后5次测量值,就可求出控制增量。
3.3 温湿度的测量
为了提高温湿度的测量精度,采用多点测量,单点测量多次求均值的方法。采用多个DS18b20测量食品不同位置表面的温度,对食品的中心温度采用一点多次测量求均值公式为

3.4 温度控制方法
温度控制流程如图5所示,快速解冻装置控制红外管的加热时间是由增量式PID算法计算得出,在解冻之前,可以选择快速解冻1或快速解冻2,在不同模式下,经由增量式PID算法计算出持续加热的时间是不同的,为了避免红外管的频繁启停,我们采用固定周期加热的方法,在食品放置到装置之后,由温度传感器测量食品的表面与中心温度,在加热过程中由增量式PID算法计算出加热时间,加热时间大于5s时启动红外管,否则不启动,每10s为一个控制周期,在加热的过程中根据食品表面与中心的温度由增量式PID算法实时计算出加热的时间,以加快解冻速度。
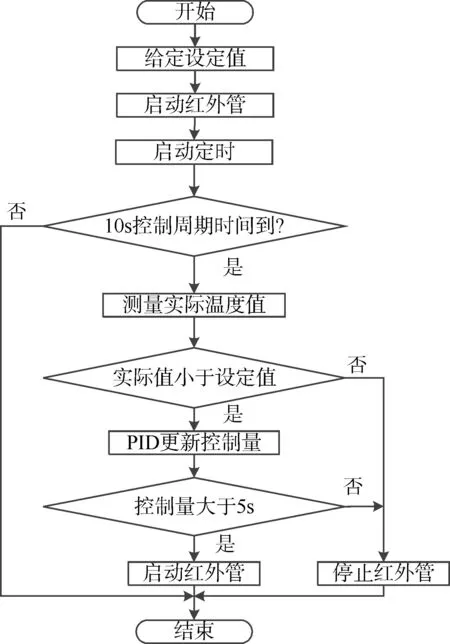
图5 温度控制流程图姜
3.5 湿度控制方法
控制过程与速解冻装置在使用红外管进行加热的过程中会蒸发掉食品中的水分,降低食品的口感,在装置中保持恒定的湿度有利于保持食品的口感,经过研究发现解冻空间的湿度要保持在98%RH时有利于食品的口感,装置通过控制超声波雾化加湿装置的加湿时间来提高湿度,在解冻的过程中由湿度传感器测量湿度的值,经由增量式PID算法计算出加湿装置需要运行的时间,当时间小于10s时不工作,大于10s开始工作,20s为一个循环控制周期,由增量式PID算法实时计算出加热的时间,以保持恒定的湿度达到98%RH。
4 称重传感器电路设计
称重采用电阻电桥,解冻装置在进行解冻之前需要获得食品的质量以确定红外管加热的总时间。

图6 称重传感器电路图
通过获得食品的质量,以及大量试验获得加热时间与质量有关的数据,以一次差值确定时间与重量的函数,其电路图如图6所示。
当电桥的输出端连接阻抗较大的运放时,由于运放的输入阻抗非常高,因此可视为开路[9~12]。此时输出电压为


当电桥平衡时,电桥输出为零,此时应该满足假设各桥臂上的阻值都发生变化,设阻值增量分别为 ΔR1、ΔR2、ΔR3、ΔR4,则电桥输出为


当四个桥臂是电阻应变片时,将公式代入上式,得:

最后凭借弹性元件材料特性以及受力的情况,得到所测物体重力与应变之间的表达式,代入式(10)可得到重力与桥臂输出电压的关系[13~16]。
5 数据比较分
在选用相同质量的三块猪肉,冰冻到相同温度后,在三种不同的模式下进行解冻,解冻的折现图如图7所示,在三种加热模式下快速解冻要比常规解冻的速度快,说明了在采用增量式PID算法后,有效地缩短了食品的解时间,快速解冻1比快速解冻2要快,说明了通过增大比例因子可以进一步缩短解冻时间,其折线图如图7所示。
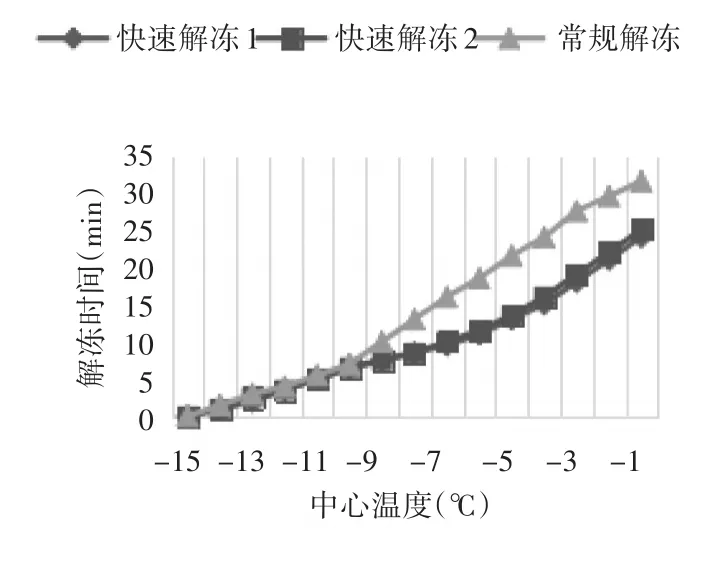
图7 三种模式解冻猪肉实验折线图
6 结语
设计过程通过STM32f103zet6为核心,其具有pwm、AD等外部设备简化了电路,设计采用了增量式PID算法增加了控制精度,采用在加热的同时控制装置内的湿度,有利于提高解冻后食品的口感,为以后解冻设备的研究打下了基础。