遵守国际海上避碰规则的无人船自主避障方法综述
2019-09-28王建华郑翔马伟刚魏鹏
王建华 ,郑翔 ,马伟刚 ,魏鹏
1. 上海海事大学,上海市 浦东新区 201306
2. 上海临港海洋高新技术产业发展有限公司,上海市 浦东新区 201306
随着无人船行业发展应用,出现了无人船和人工驾驶船舶混合航行的新情况,无人船遵守国际海上避碰规则的问题逐渐成为业界关注的焦点。国际海事组织于1972年制定了国际海上避碰规则公约(COLREGS-International Regulations for Preventing Collision At Sea,1972),虽然目前的法律条文对无人船在自主避障时是否应该遵守该规则没有明确的规定,但国际上一些领先的无人船研究机构已对这个问题进行了深入的研究,本文介绍目前文献中的一些典型方法。
国际海上避碰规则主要条文
在无人船自主避障的研究文献中,涉及的国际海上避碰规则主要包括如下几条:
第七条 碰撞危险
(1)每一船都应使用适合当时环境和情况的一切可用手段判断是否存在碰撞危险,如有任何怀疑,则应认为存在这种危险。(2)在判断是否存在碰撞危险时,考虑的因素中应包括下列各点:1)如果来船的罗经方位没有明显的变化,则应认为存在这种危险;2)即使有明显的方位变化,有时也可能存在这种危险,特别是在驶近一艘很大的船或拖带船组时,或是在近距离驶近他船时。
第八条 避免碰撞的行动
(1)为避免碰撞所采取的任何行动必须遵循本章各条规定,如当时环境许可,应是积极的,应及早地进行和充分注意运用良好的船艺。(2)为避免碰撞而作的航向和(或)航速的任何改变,如当时环境许可,应大得足以使他船用视觉或雷达观测时容易察觉到;应避免对航向和(或)航速作一连串的小改变。(3)如有足够的水域,则单用转向可能是避免紧迫局面的最有效行动,只要这种行动是及时的、大幅度的并且不致造成另一紧迫局面。(4)为避免与他船碰撞而采取的行动,应能导致在安全的距离驶过。应细心查核避让行动的有效性,直到最后驶过让清他船为止。(5)如需为避免碰撞或须留有更多时间来估计局面,船舶应当减速或者停止或倒转推进器把船停住。(6)(a)根据本规则任何规定,要求不得妨碍另一船通行或安全通行的船舶应根据当时环境的需要及早地采取行动以留出足够的水域供他船安全通行。(b)如果在接近他船致有碰撞危险时,被要求不得妨碍另一船通行或安全通行的船舶并不解除这一责任,且当采取行动时,应充分考虑到本章各条可能要求的行动。(c)当两船相互接近致碰撞危险时,其通行不得被妨碍的船舶仍有完全遵守本章各条规定的责任。
第十三条 追越局面
(1)任何船舶在追越任何他船时,均应给被追越船让路。(2)一船正从他船正横后大于 22.5°的某一方向赶上他船时,即该船对其所追越的船所处位置,在夜间只能看见被追越船的尾灯而不能看见它的任一舷灯时,应认为是在追越中。(3)当一船对其是否在追越他船有任何怀疑时,该船应假定是在追越,并应采取相应行动。(4)随后两船间方位的任何改变,都不应把追越船作为本规则条款含义中所指的交叉相遇船,或者免除其让开被追越船的责任,直到最后驶过让清为止。
第十四条 对遇局面
(1)当两艘机动船在相反的或接近相反的航向上相遇致有构成碰撞危险时,各应向右转向,从而各从他船的左舷驶过。(2)当一船看见他船在正前方或接近正前方,在夜间能看见他船的前后桅灯成一直线或接近一直线和(或)两盏舷灯;在白天能看到他船的上述相应形态时,则应认为存在这样的局面。(3)当一船对是否存在这样局面有任何怀疑时,该船应假定确实存在这种局面,并应采取相应的行动。
第十五条 交叉相遇局面
当两艘机动船交叉相遇致有构成碰撞危险时,有他船在本船右舷的船舶应给他船让路,如当时环境许可,还应避免横越他船的前方。
第十六条 让路船的行动
须给他船让路的船舶,应尽可能及早地采取大幅度的行动,宽裕地让清他船。
第十七条 直航船的行动
(1)(a)两船中的一船应给另一船让路时,另一船应保持航向和航速。(b)然而,当保持航向和航速的船一经发觉规定的让路船显然没有遵照本规则条款采取适当行动时,该船即可独自采取操纵行动,以避免碰撞。(2)当规定保持航向和航速的船,发觉本船不论由于何种原因逼近到单凭让路船的行动不能避免碰撞时,也应采取最有助于避碰的行动。(3)在交叉相遇局面下,机动船按照本条 1 款第二项采取行动以避免与另一艘机动船碰撞时,如当时环境许可,不应对在本船左舷的船采取向左转向。(4)本条并不解除让路船的让路义务。
相关概念与问题描述
(1)速度障碍
速度障碍法(VO - Velocity Obstacles)最早于1993年的机器人与自动化国际会议(ICRA 93)上由喷气推进实验室的Paolo Fiorini等学者提出,后经不断改进,目前已成为无人系统避障方法的一个主要技术分支,其基本思想包括碰撞锥和避让速度。
1) 碰撞锥与速度障碍
碰撞锥是速度障碍法的基础,可由图1来说明。假设t0时刻无人船中心位于A点,速度为VA;障碍物中心位于B1点,速度为VB1;无人船和障碍物的大小都简化为不同半径的圆盘,如图1(a)所示。为便于计算,将无人船收缩到中心点,将无人船的半径加到障碍物上,形成扩大的障碍物圆盘,如图1(b)所示,无人船与障碍物之间的相对速度VA,B1=VAVB1,如果该相对速度的方向穿过障碍物圆盘,无人船将与障碍物在后续某一时刻发生碰撞,所以由两条切线λr和λf围成的锥形区域CCA,B1称为碰撞锥。如果相对速度位于碰撞锥外,无人船与障碍物将不会发生碰撞。如果考虑无人船的绝对速度,可用障碍物的速度VB1对碰撞锥CCA,B进行平移,得到速度障碍(V0),如图1(c)所示。
碰撞锥是基于相对速度的概念,速度障碍是基于绝对速度的概念,它们将无人船的速度空间划分为碰撞和避碰两个区域。如果无人船的速度位于碰撞锥或速度障碍的边界,无人船将与障碍物擦刮而过。
无人船相对于每个障碍物有一个速度障碍,如果考虑多个障碍物,可将多个速度障碍进行叠加,如图2所示为两个障碍物和的速度障碍叠加。这时,为避免与任一障碍物碰撞,应选择无人船的速度位于各障碍速度的并集之外。
2) 避让速度
碰撞锥要求无人船的速度位于速度障碍区域之外,但速度的改变需要动力系统的支持。无人船在t0时刻的可行加速度(FA - Feasible Acceleration)由动力系统配置、船体结构和操纵约束决定,假设无人船的可行加速度范围如图3中的平行四边形所示,经过时间Δt后无人船的可达速度为RV(Reachable Velocity)。
可达避让速度(RAV - Reachable Avoidance Velocity)定义为可达速度RV和速度障碍V0之差,如图4(a)所示,由Sr和Sf两个不相邻的部分构成。对于多个障碍物,可达避让速度可由多个不相邻的区域构成,如图4(b)所示。为避开障碍物,无人船可在可达避让速度中选取适合的避让速度。
(2)最近会遇点
最近会遇点(CPA - Closest Point of Approach)是他船驶过时距本船距离最小的位置点,CPA的计算是船舶避碰的基本问题。对于人工驾驶船舶,CPA是舵手在进行避碰决策时的重要参考;对于无人船,CPA是避碰决策空间中的关键元素,麻省理工学院计算机科学与人工智能实验室(CSAIL)海洋机器人组Michael R.Benjamin团队在CPA的计算方面做了深入的研究工作。
1) 最近会遇点问题描述
Michael R. Benjamin在2002年5月提交的博士学位论文中,对最近会遇点问题进行了详细描述。无人船的操舵模块由行为和优化引擎构成,优化引擎负责动作的选择,动作向量空间包含航向 θ、速度v和持续时间t。操舵模块通过传感器感知本船的位置、航向和速度[x y θ v]以及他船的位置、航向和速度[xbybθbbv],输出一个备选动作的三维向量 ,最近会遇点CPA是评价备选动作[θ v t]的重要指标,由到达最近会遇点的时间TCPA和最近距离DCPA表示。

图1 碰撞锥示意图

图2 多障碍物碰撞锥
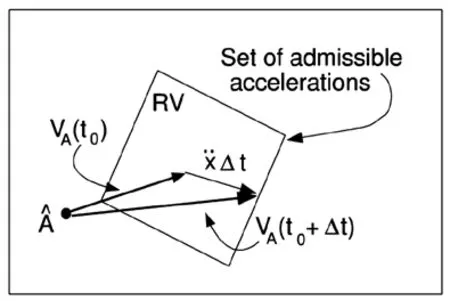
图3 可行加速度约束
对于给定的备选动作[θ v t],要计算在最近会遇点时两船间距离DCPA,首先要计算达到最近会遇点的时间TCPA。假设初始时刻本船的位置在[x(t0) y(t0)],他船位置为[xb(t0) yb(t0)],在被选动作[θ v t]完成后,本船和他船的位置分别为:

它们之间的距离为:

其中,
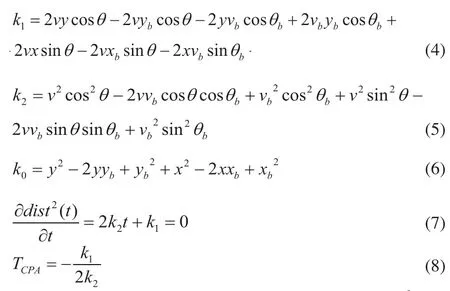
当两船并行行驶时,k2=0,可令TCPA=0;如果说明两船已驶过最近点,也令TCPA=0。在求出达到最近会遇点时间后,即可求出在最近会遇点时两船间距离,

2) 分层缓冲CPA快速计算方法
如果两船的航速和航向保持不变,CPA可由上述公式求得。但当两船的航速和航向随时间变化时,需要通过迭代方法求解CPA,这需要耗费处理器的大量时间,特别是当本船周围有多艏他船需要避让时,这就对处理器提出了挑战。为此,2017年9月在Anchorage举行的OCEANS’17会议上Michael R. Benjamin团队发表了一种分层缓冲的CPA快速计算方法。

图4 可达避让速度示意图
分层缓冲CPA快速计算方法由三部分构成:内层循环、外层循环和CPA计算引擎。对于本船的所有可能轨迹,内层循环进行CPA计算;对于他船的所有可能轨迹,外层循环调用内层循环进行CPA计算;对于给定的本船和他船轨迹,计算引擎进行CPA计算;将不变的参数进行静态缓存,以提高计算效率。
内层循环算法如图5所示,对于给定的他船位置、航向和速度[xcnycnθcnvcn],以及本船的位置[xosyos],在决策空间D中计算本船所有可能机动[θ v]时的CPA,如图6所示是一次计算结果。
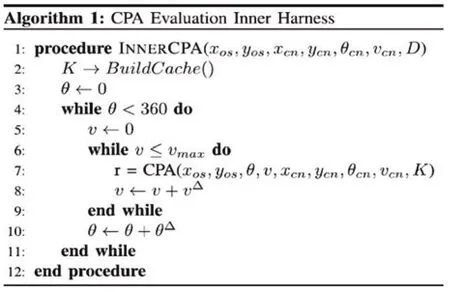
图5 内层循环算法

图6 内层循环CPA计算结果之一
外层循环算法如图7所示,对于给定的他船位置[xcnycn]和本船的位置[xosyos],改变他船的航向和速度,调用内层循环,计算本船所有可能机动[θ v]时的CPA,如图8所示。

图7 外层循环算法

图8 内层循环CPA计算结果之二

图9 CPA计算引擎
CPA计算引擎如图9所示,对于给定的他船位置、航向和速度[xcnycnθcnvcn],以及本船的位置、航向和速度[xosyosθosvos],计算对应的CPA。在内层循环的每次CPA计算中,一些参数[xcnycnθcnxosyos]不变,相关项可以进行静态缓存,以提高速度,如图10所示。

图10 静态缓存方法
主要方法
基于速度障碍的方法
基于速度障碍(VO)的方法由喷气推进实验室(JPL)的Yoshiaki Kuwata等学者在2014年1月的IEEE海洋工程期刊上发表,具有较高的计算效率,进行了充分的水面实验验证。
(1) COLREGS速度障碍约束
上节介绍的速度障碍V0是理想的情况,假设本船和他船的速度均不变。如果考虑速度变化等不确定因素,碰撞锥将扩大。如图11所示,红线内灰色区域是无人船A相对于来船B在理想情况下的碰撞锥,称为硬约束;黄色区域是考虑不确定因素时碰撞锥的变化,称为软约束,以提供一个安全缓冲区。包括黄色区域的碰撞锥称为最坏情况下的碰撞锥,或最坏情况下的速度障碍(WVO)。
由于碰撞锥已包含无人船应该从来船哪一侧通过的信息,因此,可将COLREGS规则看作速度空间中的一组约束。如图11所示的可行速度空间可分为三个区域:如果无人船选择区域V3中的速度,它将离开障碍物,不会发生碰撞;如果无人船选择区域V1中的速度,它将从来船的右侧通过,在无人船追越他船、对遇和来船在右侧的交叉相遇局面,不可选择区域V1中的速度;如果无人船选择区域V2中的速度,它将从来船的左侧通过。
(2) 规则选择
6.利用多种德育载体,拓宽德育教育渠道。一是加强德育网站建设,创建和丰富学校德育网站,利用网站对学生进行德育教育和网络道德教育。二是树立榜样和典型,发挥模范作用。三是加强社团建设,丰富学生校园文化生活,拓宽德育教育渠道。
规则选择器首先针对无人船和周围来船的当前位置和速度计算最近会遇点(CPA),根据如图12所示的几何约束,评估是否有适用的COLREGS规则,只将COLREGS规则用于相关的来船,避免在每个时刻对每一艏来船的大量计算,因此提高了效率。
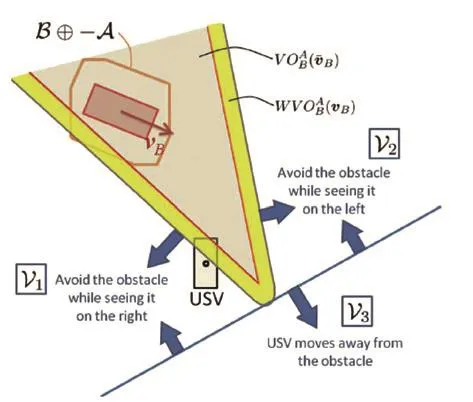
图11 考虑COLREGS的速度障碍
如果发现碰撞局面出现,规则选择器需确认适用的规则,考虑四种情况:追越、对遇、从左侧交叉相遇和从右侧交叉相遇。由于环境感知的误差,如果在每个时刻都作出全新的决策,那么会导致COLREGS规则的频繁切换。为避免这种情况出现,在系统中引入滞后环节,并降低改变规则的频率。一旦某一COLREGS规则被起用,它将持续一段最小的时间间隔,让他船看到无人船的明显意图,这也是COLREGS规则的要求。选择的最小时间间隔应大于无人船的动态时间常数。
为求出最优速度矢量,在包含速度v和航向θ的决策空间构建离散网格,给定速度障碍V0和COLREGS规则约束后,代价函数为:。其中,为参考速度,WT为碰撞时间的权重,Wv为速度偏离的权重。
(3)水面试验
COLREGS算法集成在喷气推进实验室研发的自主系统“机器人智能体指挥和传感控制体系(CARACaS)”中,该系统可通过惯导感知无人船的状态,通过雷达、激光雷达、视觉系统和地图服务器感知周围环境。
试验采用如图13(a)所示无人战斗艇,其自主航行由CARACaS控制,该艇曾完成了港口巡逻、目标跟踪和静态障碍物避让的示范演示。周围往来船只采用一艏如图13(b)所示的12m交通艇和两艏如图13(c)所示的7m刚性充气艇。试验中无人船的目标航点在前方1000m处,航速为8kn,算法中的参数通过仿真和初始水面试验来整定。
如图14所示为对遇和交叉相遇局面的试验结果。首先无人船驶向目标航点;图14(a)中,无人船检测到远方有一艏7m刚性充气艇,估计其速度很低,仅将其当静止障碍物,无需COLREGS规则约束;随着7m刚性充气艇接近,无人船识别为对遇局面,COLREGS约束鼓励向右机动避让,如图14(b)所示;图14(c)中,无人船检测到另一艏7m刚性充气艇从前方接近,识别两艏充气艇都为对于局面,继续向右机动;当无人船绕过两艏充气艇时, 12m充气艇从右侧接近,识别为交叉相遇局面,如图14(d)所示,对遇和来船在右侧的COLREGS规则均要求无人船向右机动;图14(e)中,无人船成功避让来船,继续驶向目标航点。
图12 选择COLREGS规则的几何约束
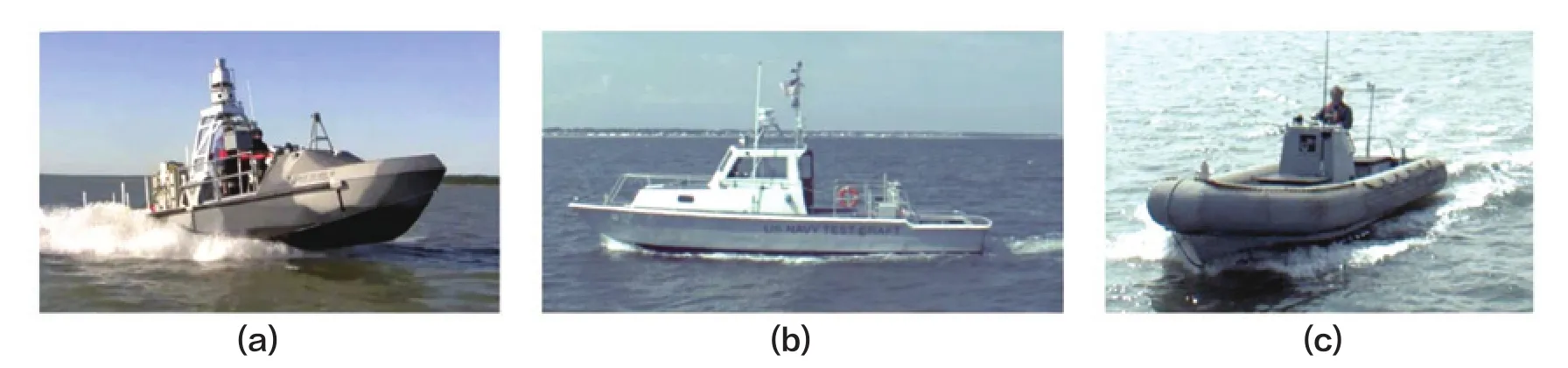
图13 水面试验用船

图14 水面试验结果
基于行为的多目标优化
国际海上避碰规则(COLREGS)是指导船舶驾驶员的文件,不能直接输入无人船的控制系统。在拥挤的水域,有时COLREGS的多条规则可能同时有效,也可能有多种不同的机动选择可满足规则要求,人工驾驶可灵活处理这些规则冲突,但给无人船自主控制系统提出严峻挑战。为此,麻省理工学院海洋工程中心和牛津大学工程科学系的联合团队Michael R.Benjamin、Paul M. Newman等学者于2006年的机器人与自动化国际会议(ICRA2006)上发表了一种基于行为的多目标优化方法,将COLREGS的规则转化为行为,目前已得到较多的应用。
(1) 基于行为的控制
基于行为的控制最早于1985年由麻省理工学院人工智能实验室的R. Brooks博士提出,随后广泛应用于室内机器人、野外机器人、太空机器人和海洋机器人,其优点是:独立模块便于研发,不需要单个复杂的世界模型,对于在动态环境中具有由事件触发的行为的快速反应机器人尤具潜力,所以适于遵守COLREGS的无人水面艇避碰这样的复杂场景应用。
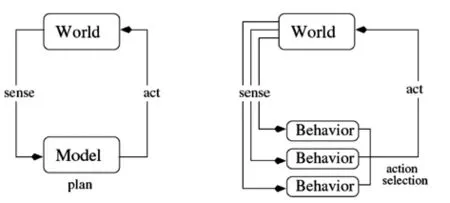
图15 传统控制与基于行为的控制
如图15所示是传统控制与基于行为的控制比较,左图的传统控制是感知—规划—动作的回路,其中的规划或者决策基于单一的世界模型;在右图基于行为的系统中,无人船的控制是一组相互独立的模块共同工作,选择出一个适当的动作,即执行的驱动,一般用向量表达。动作空间是所有可能动作的集合,例如无人船可能的航向θ和速度v 组合。
(2) 基本行为的目标函数
在多目标优化方法中,为每种行为定义一个目标函数,遵守COLREGS的无人水面艇基本行为包括:
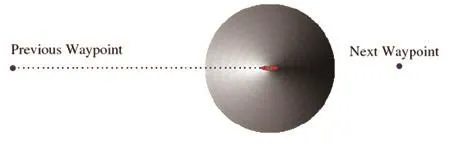
图16 航点行为的目标函数
1)航点行为:航点通常用一组坐标(xi,yi)表示,无人船的当前位置(x,y)由GPS获取,根据被选动作〈θ,v,t〉完成后无人船与下一航点的距离,建立选择航点行为的目标函数。如图16所示为不同被选动作时航点行为的目标函数值,颜色越深,被选动作的可能性越大。
2) 避碰行为:基于被选动作〈θ,v,t〉的最近会遇点距离DCPA,设置两个参数:内距离和外距离。当DCPA小于内距离时,认为发生碰撞;当DCPA大于外距离时,认为不会发生碰撞;当DCPA在内外距离之间时,目标函数线性变化。如图17所示是障碍物速度为3m/s和5m/s两种情况下的目标函数值。
3) COLREGS行为:针对无人船,主要考虑对遇和交叉相遇两种情况,目标函数也基于被选动作〈θ,v,t〉的最近会遇点距离DCPA。为满足COLREGS要求,在对遇局面,将被选航向与当前相对方位比较,奖励向右舷机动,惩罚向左舷机动,如图18所示;在交叉相遇局面,避免在他船前面穿越,在目标函数中,奖励在他船后面穿越,惩罚在他船前面穿越,如图19所示。
(3) 基于行为的多目标优化方法实验结果
多目标优化方法由一组目标函数和相应的权重组合成一个总的目标函数,通过对总目标函数的优化来选择最优的被选动作。在实际应用中,需要求解速度能满足无人船控制回路的要求,通常在1-20Hz。如图20所示是多目标优化方法的水面实验结果,其中无人船2(黄色)仅作航点跟踪,不考虑避碰。
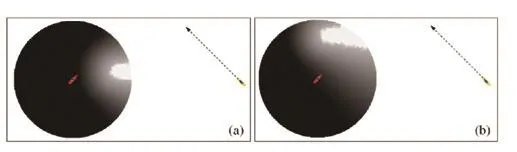
图17 避碰行为的目标函数
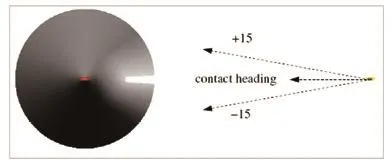
图18 对遇局面的目标函数

图19 交叉相遇局面的目标函数
基于风险意识的多目标优化
在无人船遵守COLREG规则的避碰技术方面,英国贝尔法斯特女王大学、劳斯莱斯和南安普顿索伦特大学合作团队的学者于2017年的国际自动控制联盟会议(IFAC2017)上发表了另一种基于多目标优化的方法。他们的路径规划系统分为离线的全局路径规划和在线的局部路径规划两个模块。当给定目的位置后,全局路径规划模块生成一系列航点,只有当无人船在两个航点之间检测到障碍物时才启动局部路径规划模块。一旦碰撞的危险得到确认,局部规划模块便生成一条从当前位置到下一个航点的局部路径,既避免碰撞,又满足COLREG规则,还考虑了来船不遵守COLREG规则的情况。
(1) 情景意识与风险评估
为评估碰撞的风险,他们采用最近会遇点方法。根据船型和工作环境,预先设置机动的最长持续时间tmax和最小安全距离dmin,将达到最近会遇点的时间TCPA和最近会遇距离DCPA与参数tmax和dmin进行比较,如果0≤TCPA≤tmax且DCPA≤dmin,认为存在碰撞风险,令risk=1。为判断来船是否遵守COLREG规则,引入两个附加参数tsafe和dsafe和标志flag,让tsafe≤tmax,dsafe≤dmin,如果0≤TCPA≤tsafe且DCPA≤dsafe,则认为存在紧急碰撞风险,令risk=2。假设当前时刻为k,如果risk(k-1)=1,且risk(k)=2,那么认为来船未遵守COLREG规则,这时局部路径规划模块生成一条紧急规避路径。
(2) 决策与规则选择
一旦出现碰撞的风险,则需要确定遭遇的局面,即是对遇、交叉相遇或是追越。如图21所示为COLREG规则的遭遇局面区域划分,用于选择适当的规则。给定来船相对于无人船的方位,将确定一个唯一的扇区,从而适用相应的COLREG规则。如果确认存在碰撞的风险,而且作出直航的决策,那么无人船将保持航向;如果作出让路的决策,那么模块将规划新的路径,生成替代的航点。
(3) 路径重新规划
避碰路径可通过生成一个或多个子航点来进行规划,优先采用单个子航点,因为计算效率高、实时性好。图22表示路径重新规划过程,开始时无人船跟踪预定路径AC,速度为v,航向为θ;在位置A时检测到与来船碰撞的风险,于是模块生成子航点B,无人船改变航向至θ',沿着新路径AB航行至B点,然后返回目的航点C。在重新规划路径时,需要同时考虑几个不同的目标:1)保证安全,无碰撞风险;2)路径平滑,避免航向突变;3)新路径不应偏离原路径过多。这就成为一个多目标优化问题(MOP), COLREG规则为一组以不等式表达的约束,抉择变量是航向和持续时间。他们采用粒子群优化(PSO)算法进行求解,粒子数量为50,遗传代数为30~40,再增加,性能提高不大。

图20 对遇局面的实际水面实验结果

图21 COLREG避碰局面区域划分
如图23所示是与多个障碍目标相遇的仿真实验结果,无人船避让了三个运动目标A、B、C和一个静止目标D。左上图的目标B代表追越局面,右上图的目标A代表交叉相遇局面,左下图的静止障碍物D位于无人船的航线附近,如果仅进行小的航向调整,运动目标C将构成对遇的局面,于是无人船选择了大的机动,同时避开了目标D和C,右下图为重新规划的完整路径。
如图24所示为来船不遵守COLREG规则的情况,开始时无人船检测到与来船A碰撞的危险,根据COLREG规则,来船A应让路,但连续检测发现来船并未遵守COLREG规则,于是无人船重新规划路径,进行紧急避让。
基于虚拟力场的方法

图22 路径重新规划示意图
在遵守COLREGS的无人船避障方面,韩国也开展了深入的研究工作,昌原国立大学控制与仪器工程系Joongseon Joh教授团队2004年6月在《控制、自动化与系统》国际期刊上发表了基于虚拟力场的方法。为遵守COLREGS,他们对虚拟力场(VFFVirtual Force Field)方法进行了改进,并采用模糊推理实现路径跟踪模式的选择,进行了各种会遇局面下的大量仿真实验。
(1) 改进的虚拟力场方法
虚拟力场(VFF )是移动机器人导航广泛采用的方法,如图25所示,目标产生引力,而障碍物产生斥力。如图26上图为VFF的直接应用,无人船受两个力的作用,引力将无人船吸引到下一个航点,而斥力让无人船离开障碍物。显然,直接应用VFF不能让无人船快速回归到预定的路径,更不便考虑COLREGS。为此,他们对VFF方法进行了改进。
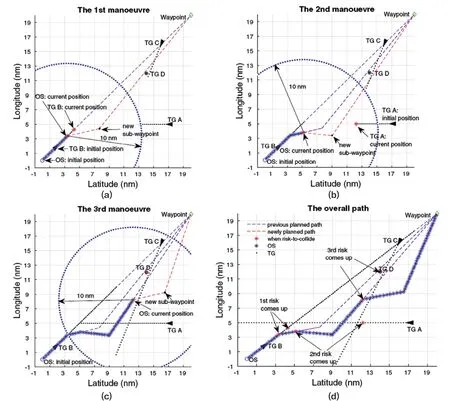
图23 多个障碍目标情况下的避碰路径

图24 来船不遵守COLREG情况下的避碰

图25 VFF示意图
(2) 模糊推理
无人船周围的水域可划分为危险水域和安全水域,无人船在这两个区域中的导航模式不同。无人船在危险区域的逃离运动通过让α=0和β=1来实现;在安全区域,α和β的值通过模糊推理来确定。假设d为无人船偏离预定路径的距离,划分为近、中、远三个集合{N,M,F}, α和β划分为小、中、大三个集合{S,M,B},确定ψtk的推理规则如下:(1)如果d∈N,那么α∈β且β∈S;(2)如果 d∈M,那么α∈M且β∈M;(3)如果d∈F,那么α∈S且β∈B。

图26 改进的VFF示意图
(3) 仿真实验
他们基于长1.4m,宽0.4m,排水量23kg的无人船模型,进行了大量的仿真实验,如图27为COLREGS三种典型情况下的结果,验证了这种方法可实现静态和动态障碍物的避让,而且满足COLREGS要求。
基于专家系统的方法
韩国首尔大学船舶与海洋工程系学者Han-Jin Lee 和 Key Pyo Rhee 于2001年发表在《国际造船进展》期刊上发表了一种基于专家系统和模糊推理的方法,他们通过模糊推理求得碰撞风险度,采用专家系统建立动作空间,然后采用A*搜索算法得到避碰动作规划。
(1) 碰撞风险度
碰撞风险度通过模糊推理求得,TCPA和DCPA作为输入模糊变量,采用三角形隶属度函数,推理规则如下表所示,构成一个二维矩阵。碰撞风险度的取值为-1~1之间,负值表示TCPA为负。碰撞风险度的绝对值越大,表示碰撞的风险越高。当有多艏来船时,给定环境中的风险度为所有来船风险度的最大值。解模糊方法如下:

式中,αi为第i条规则条件部分的概率, CRi第i条规则结论部分的风险度取值。
(2) 专家系统
动作空间由本船能采用的航速和航向构成,专家系统用于确定动作空间,而不是动作本身。专家系统采用NASA约翰逊航天中心设计的C语言集成产生式系统(CLIPS),根据COLREGS规则建立,主要包括主模块、情景模块和动作模块。主模块控制专家系统与避碰系统中其它模块的通讯,负责航行规则的执行。情景模块根据会遇局面对来船进行分类,将来船标记为让路船或直航船。动作模块根据会遇局面和碰撞风险度,定义本船相对于危险来船的动作空间。尽管本船是直航船,但如果碰撞风险度高于预先设定的临界值,也生成避让来船的动作空间。专家系统与其他子系统的关系如图28所示,最终动作空间是所有动作空间的并集。

图27 仿真实验结果
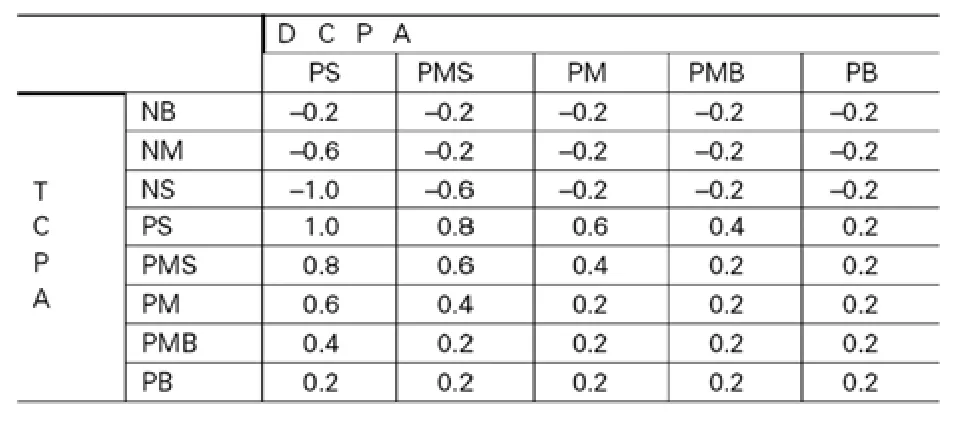
表1 推理规则
避碰系统在专家系统提供的动作空间中选择最安全的动作,方法如下:
1)如果有碰撞风险度小于0.6的动作,选择其中最接近规划航向和速度的动作;
2)如果没有1)中的动作,选择风险度最小的动作;
3)如果所有动作的风险度均为1,选择DCPA最大者。
(3)仿真实验
为验证系统的性能,模拟了两艏相同的油轮来船,长320m,航速10kn。如图29和30是交叉相遇局面的仿真结果,左图是运动轨迹,右图是风险度记录。实心箭头表示避碰动作开始的位置,空心箭头表示避碰动作结束的位置。在图29中无人船是让路船,专家系统给出右转的动作空间。在图30中,无人船是直航船,但来船未遵守避碰规则,当碰撞风险度高于临界值时开始主动采取避碰动作。
图31以对遇局面展示专家系统的作用,左图是有专家系统的结果,右图是无专家系统的结果。可见,无专家系统时也能成功避碰,但轨迹和航向变化缓慢,未能向对方表示明显的动作意图,未遵守规则。
如图32为与两艏来船在受限水域对遇的局面,其左、中、右图分别是1000s、2000s和3000s时刻的轨迹。可见,在避碰系统的作用下,三船顺利完成避碰。由于动作空间受水域限制,在避碰过程中的碰撞风险度较高,但未超出预定的临界值。
基于模糊推理的方法
前述韩国学者采用模糊控制和专家系统实现遵守COLREGs的无人船避碰,这些方法已在实际无人船上得到应用,2018年10月在查尔斯顿举行的OCEANS 2018 MTS/IEEE会议上Nam-sun Son 和 Sun-Young Kim等学者发表了韩国船舶与海洋工程研究院研发的无人船ARAGON II海面自主避碰试验情况。

图28 避碰系统流程图

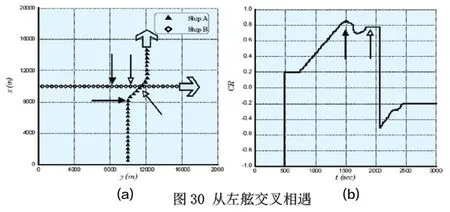

图31 对遇局面中有无专家系统的比较
(1) 硬件配置
ARAGON是在韩国海洋与渔业部项目“用于海洋观测与监控的多任务智能无人水面艇研发”支持下于2011年开始研发的系列无人船,其第二代ARAGON II 于2016年研制,采用滑行艇型,如图33所示,长8m,宽2.5m,单机单泵配置,主机功率400hp,最大航速40kn。
ARAGON II的自主避碰系统主要由三部分构成:障碍物识别、避碰算法和自动驾驶。障碍物识别负责收集无人船的导航信息和障碍物信息,其中无人船导航信息通过GPS和惯导获得,障碍物信息通过融合敌我识别系统(AIS)、雷达、激光雷达和光电系统等多元信息得到;避碰算法采用可变动作空间搜索和基于碰撞风险的模糊推理来估计最优路径;自动驾驶负责跟踪规划的路径。
(2) 软件算法
为考虑碰撞风险程度的变化,他们设计了可变动作空间搜索算法,如图34所示。当遇到障碍物时进行动作空间配置,在每一个节点通过模糊推理估计碰撞风险程度,生成可变动作空间,根据代价函数从备选的路径中选取最优路径。该方法在ARAGON I上采用AIS进行了海试验证。
(3) 海试结果
在ARAGON I基础上, ARAGON II的自主避碰系统增加了雷达、激光雷达和光电系统的数据融合。为评估其性能,他们在釜山苏杨湾进行了实际海面试验,采用5艏交通船设计了复杂的会遇局面,包括对遇、左侧交叉相遇、右侧交叉相遇、第二次对遇和追越,如图35所示,其中追越和第二次对遇的交通船为虚拟生成。无人船与交通船的航速均为10kn,避碰开始时两船之间的距离是500m。
图36和图37的上图是试验过程中无人机拍摄的场景照片,下图是无人船和交通船的轨迹和相关数据记录,黑线代表无人船,红线代表通过信息融合得到的交通船轨迹数据,蓝线代表追越和第二次对遇的虚拟交通船轨迹。
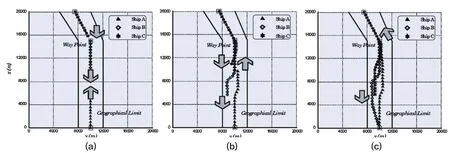
图32 受限水域中的对遇局面

图33 无人水面艇 ARAGON II
在追越局面(来船ID 111)和左侧交叉相遇(来船ID 456)局面中,ARAGON II是直航船,保持航向不变。在右侧交叉相遇局面(来船ID 123)中,无人船是让路船,采取向右转向的避碰动作。
在追越和交叉相遇的局面结束后是两次连续的对遇局面(来船ID 789和ID 222),来自传感器融合的轨迹数据(ID9007)与AIS数据(ID789)类似。根据COLREGs规则,ARAGON II是让路船,它采取了两次向右转向的避碰动作。
试验表明:在5次会遇中,ARAGON II的自主避碰系统均作出了直航或采取避碰动作的正确决策,实现了遵守COLREGs规则的无人船自主避碰。
性能评估
前面介绍了遵守国际海上避碰规则的一些典型避障技术,那么如何评估无人船是否遵守COLREGs呢?为此,麻省理工学院计算机科学与人工智能实验室学者Kyle L. Woerner和 Michael R. Benjamin于2018年5月在日本神户举行的OCEANS 2018 MTS/IEEE 会议上发表了一种在有人驾驶和无人驾驶船舶协同工作时实时自动评估遵守COLREGs性能的方法。
(1) 会遇几何

图34 可变动作空间搜索算法
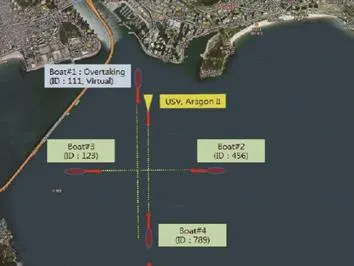
图35 避碰试验场景
会遇局面中的几何关系如图38所示,当本船(O/S)与来船(Contact)间距离r小于检测距离(Rdetect)的阈值时,认为两船进入会遇局面。会遇时的完整几何关系用来船相对航向α、方位β、距离r和速度v来表示。进入会遇局面后,首先需要评估碰撞的风险,通过计算CPA的三个值来确定:最近会遇距离rCPA,达到最近会遇点的时间tCPA,以及相对位姿ΘCPA。对最近会遇距离rCPA,设置4个可配置的阈值,根据重要性从小到大依次为:优选距离Rpref、最小可接受距离Rmin、几乎碰撞距离Rnm和碰撞距离Rcol。
(2) 安全性
在无人船避碰文献中,安全性通常用碰撞次数与会遇次数的比值来表示,但这与人工驾驶船舶在进行避碰决策时的情况不一致,特别是在有多艏来船的复杂局面中。通过考虑避碰决策中的几个重要变量,他们提出了一种采用安全性函数的量化方法,较之前仅考虑是否碰撞的方法更有意义。
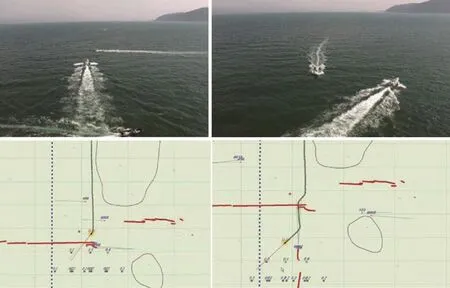
图36 追越和交叉相遇局面的避碰
安全性函数S=S(rCPA,ΘCPA)包含CPA的距离rCPA和姿态Θ(αCPA,βCPA),可分解为基于距离的安全性函数Sr和基于姿态的安全性函数SΘ,即S=S(Sr,SΘ),根据需要,可只考虑距离或者姿态。对于图38中黄色区域的会遇,Rmin>rCPA>Rnm,这是不安全的会遇,应采取紧急机动,密切注意,提高后续过程的安全性。橙色区域是突破几乎碰撞距离Rnm的会遇,只有侥幸脱险的可能。在中间红色区域的会遇,认为实际碰撞发生。安全性函数根据不同的安全等级阈值,将CPA距离映射为安全性得分。图38仅表示安全距离的划分,但也可将姿态Θ映射为安全性得分,并进行二者的组合。
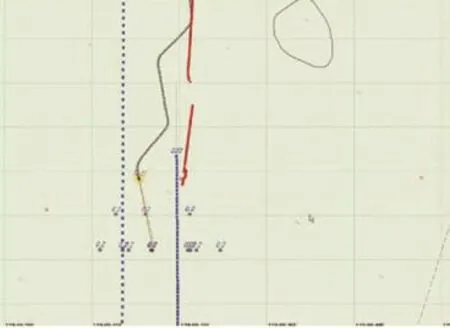
图37 对遇局面的避碰
(3) 规则评估
COLREGs规则评估软件用于中立的第三方观测者,建立了规则评估库,为中立打分提供基础。规则评估库的功能包括:1)辨识会遇局面中两船的几何关系;2)辨识每船需遵守的COLREGs规则;3)对每船遵守规则的动作进行量化打分。规则评估库既用于实时运行的软件,也用于事后分析的软件,这样保证评估结果的一致性。规则评估库也可让用户设置一些配置参数。

图38 会遇局面中的几何关系示意图
(4) 软件框架

图39 评估软件框架
评估软件的总体框架如图3 9所示,其中两个关键模块是实时协议评估uFldProtocolEval和安全惩罚实时协议评估模块收到低于阈值的得分后,惩罚模块对船v2发出惩罚通知。中图为交叉相遇局面,根据COLREGs的15和16条规定,只需要让路船v1进行避碰机动,但v1并未遵守规则,当从实时协议评估模块收到低于阈值的得分后,惩罚模块对船v1发出了惩罚通知。右图是更复杂的场景,五船呈星型汇聚,随着实时协议评估模块的输出结果,惩罚陆续发出,如图41中岸端界面截图所示。

图40 模拟实验场景
在仿真实验基础上,将上述方法应用到Aquaticus无人船和人工驾驶船的混合比赛中,结果发现:无人船忠实遵守COLREGs规则,而人工驾驶员会利用这一点引诱无人船避uFldSafetyPenalty。实时协议评估模块负责会遇局面安全性和规则符合性的评估,输出违规报告;当避碰过程出现违规情况,需要进行惩罚时,安全惩罚模块通知违规船,并在面向任务的操作系统数据库中进行广播。软件的岸端界面显示两种类型的信息:1)被评估规则的状态,惩罚阈值和违规惩罚的类型;2)违规船的具体信息,包括是否有正在评估的惩罚、现有惩罚到期时间、任务期间该船被惩罚的次数等。
(5) 试验结果
他们首先在仿真环境中进行了无人船和人工驾驶船的交互场景实验,如图40所示。左图为对遇局面,两船均需按照COLREGs的14条进行避碰机动,但只有船v1正确执行,当从让,从而影响无人船实现任务目标,达到人驾船获胜的目的,体现了人工驾驶的优势。

图41 岸端软件显示界面
结束语
在遵守COLREGs的无人船自主避障技术方面,美国、英国和韩国的学者开展了深入的研究工作,已达到实船应用的程度。目前主要技术途径有:速度障碍法、最近会遇点计算、基于行为的控制、多目标优化、虚拟力场、模糊推理和专家系统。最近出现的无人船遵守COLREGs实时自动评估方法将进一步促进这方面技术的发展。 ■
