跨平台多传感器目标统一态势生成分布式融合算法研究
2019-09-27韩卫国尹晓燕蔡文彬
韩卫国,尹晓燕,蔡文彬
(1.中国人民解放军91404部队,河北 秦皇岛 066001;2. 中国船舶重工集团公司第七二四研究所, 南京 211153)
0 引 言
在现代化信息作战中,不同作战群体各平台的几十个传感器受体制、功能、部署等因素的影响难以高速有效提供一致的综合空情态势。这制约了武器系统协同进攻,难以使作战群体构成有机联系的战斗整体,难以卓有成效地实现自身防御。
1 设计思想
大型水面舰艇具有较完善的探测设备。这些探测设备包括雷达、声纳、IFF、光电、红外等各种传感器,组成了一个可以覆盖战场环境的观测网,其测量信息的维数、类型各不相同,精度也各异。一般有远程雷达,负责中高空远程警戒;中程雷达,负责中程对海和对空警戒;近程雷达,负责近程对海和对空搜索;跟踪雷达和光电跟踪设备具有很高的精度,负责为武器对海或对空射击提供解算数据;声纳用于对潜搜索,红外负责近程警戒,电子侦察负责探测目标的电子辐射信息,数据链负责跨平台信息共享。
在多平台联合作战中,目标统一态势是基础。目标统一态势的生成依赖于各平台各传感器的信息融合。多平台多传感器信息融合由各平台不同传感器系统的各处理节点共同处理、协同完成,参与节点按照“各献所知,各取所需”,通过协同链路进行数据传输。区别于传统的集中式(中心节点)处理方法,本算法针对多平台多传感器目标统一态势生成分布式处理进行研究。如图1所示,每一个节点均为一个融合节点,采用分布式融合的思想,将探测和处理任务合理分布在各节点,每个节点上的传感器负责各自的探测任务,进行处理后向其他节点输出处理结果,同时每个节点根据本节点的探测处理结果和接收到的其他节点的处理结果信息完成态势的合成和处理,并进行处理后完成数据的上报。
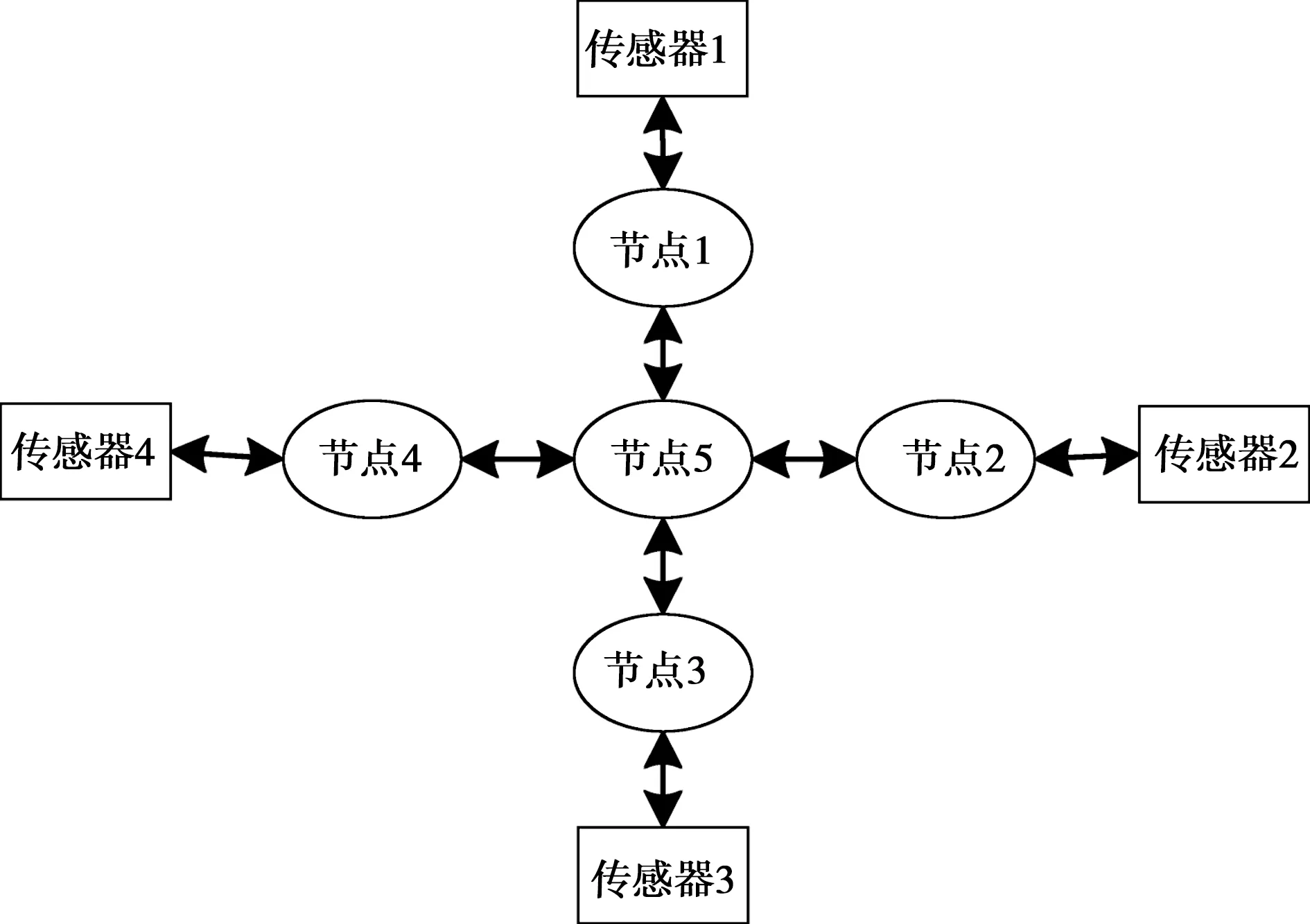
图1 跨平台多传感器协同目标态势生成示意图
本算法为一种分布式融合算法,每个融合节点都根据相应的规则对接收到的信息进行处理。然而,在实际使用过程中,不同的平台根据实际需要会赋予特定的工作职能,根据相应的工作职能各个平台可能会有不同的融合处理规则。在本算法研究应用场景中,设置一艘拦截舰和若干艘协同舰。拦截舰配置有雷达、红外传感器和武器系统。拦截舰要打击的目标为目指目标,其他已录取建航的目标为其他目标。每艘舰为一个融合节点,每个融合节点实时接收各节点传感器输出的原始目标数据和其他融合节点输出的融合目标数据进行后续处理,如图2所示。

图2 跨平台多传感器协同目标态势生成原理框图
1.1 目标预处理原则
对本节点接收的本节点原始目标数据和其他节点融合目标数据进行关联比对。若本节点原始数据与其他节点融合目标数据不相关则判为此节点首次发现目标,由本节点进行目标航迹融合处理,建立批号对照表。统一批号采用节点标识加发现节点原始批号构成,编批后使用统一批号进行数据分发。
当某节点接收到其他节点融合目标数据后本节点无此目标数据,则将目标信息传送至本舰传感器,并为此目标分配批号,进行建航跟踪,置保持标记,无论本舰传感器是否有探测到此目标,航迹始终保持。当某节点跟踪的目标航迹质量小于1时,不对外输出此目标的原始数据。
1.2 航迹融合处理原则
各节点进行航迹融合处理时,总的原则是任一目标只能在一个节点上进行融合处理并输出,目指目标必要由拦截舰进行融合处理输出。
1.2.1 目指目标融合处理
由拦截舰负责对目指目标的态势进行融合处理,处理的优点如下:
(a) 保证数据输出延时最小,由融合处理部分将延时产生的误差消化;
(b) 可由拦截舰融合本舰光电传感器共同提高目标精度;
(c) 与武器系统紧密结合,共同提升本舰拦截效率和可靠性。
1.2.2 其他目标融合处理
由发现舰负责对其他目标进行处理。由于威力或视距原因,造成发现舰航迹质量持续降低时切换至威力范围内质量最高舰船进行融合处理。优点如下:
(a) 由威力范围内舰艇对目标进行处理使得数据处理精度得到保障;
(b) 减少拦截舰的数据处理压力。
1.2.3 融合处理节点优先级顺序
(a) 目指舰船;
(b) 发现舰船;
(c) 发现舰船丢失后转至质量最高的舰船。
1.3 目标交接处理原则
在各节点目标融合处理过程中,由于目标被设为目指目标,航迹质量下降或链路断开等原因时需进行目标交接处理。
1.3.1 目指原因交接
如果某一协同舰融合处理的目标被设置为目指目标,则由拦截舰向此协同节点发送融合交接申请。目标交接后由拦截舰对目指目标进行融合处理,协同舰接收融合目标数据。
1.3.2 航迹质量下降交接
如果融合目标的航迹质量下降则由当前融合节点通过威力范围判断,向协同节点发送融合交接请求。目标交接后,原融合节点只发送原始目标数据,不再进行融合处理;新融合节点进行融合处理,并发送融合后的目标数据。
1.3.3 链路断开交接
(a) 断网判断
若节点在一定时间内未收到某协同舰状态数据,表明此节点链路断开。当前节点目指目标进行正常处理,非目指目标使用当前节点原始数据进行更新。
(b) 融合目标交接协调方法
发现某节点断网后,如果本节点传感器探测到目标,则使用本节点数据对断网节点负责的目标进行处理,并输出融合航迹数据。其他协同节点收到融合的数据后,根据质量判断准则确定是否在当前节点进行融合处理。
(c) 质量判断准则
根据原始航迹质量、节点号较小舰船进行交接原则进行判断,如果全都相同则在下个周期进行判断。
1.3.4 目标融合处理校验机制
为防止目标交接过程中导致交接处理不成功,目标未被融合处理,需要每个节点对目标是否更新进行判断,若存在某一融合目标在一定时间内未被刷新,则按照融合目标交接协调方法进行后续处理。
1.4 目标删批处理原则
1.4.1 人工删批
任一节点对原始目标进行删除后,融合目标使用融合数据进行维持,在雷达显示界面不进行显示。当维持此目标的节点数为0时,融合目标删除,并同时删除所有协同舰船上此目标的原始目标。
1.4.2 自动删批
当且仅当所有舰船都无法观测到目标且融合目标航迹质量下降至0时,删除融合目标,并删除所有协同舰船上的此批目标信息。
2 实现方法
本算法实现的具体信息流程图如图3所示。
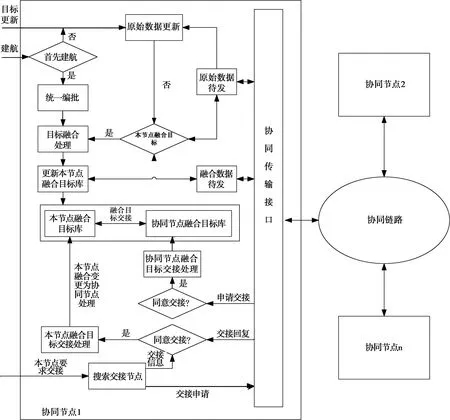
图3 跨平台多传感器协同目标态势生成算法信息流程图
3 结束语
雷达是现代化信息战中的重要传感器,受单平台雷达性能、资源和使用环境的限制,存在抗干扰、复杂环境下对低可观测及隐身目标探测和对目标快速建航及抗局部密集饱和攻击等能力上的不足。光电、红外等传感器又是雷达探测的有效补充。进行多平台多传感器协同组网探测是弥补上述不足很有效的手段。
本文提出了一种针对跨平台多传感器目标统一态势生成的分布式融合算法,并详细介绍了具体实现方法,对后续多平台多传感器协同组网的深入应用打下了基础。
