应用虚拟现实技术评价LED护栏灯用于道路照明的光品质
2019-09-26李文宜纪雅婧刘木清沈海平
李文宜,纪雅婧,刘木清,沈海平
(复旦大学电光源研究所,先进照明技术教育部工程研究中心,上海 200433)
引言
道路照明为道路使用者在夜间的出行活动提供了便利,提高了行人及行车的交通安全系数[1, 2]。道路照明所营造的光环境质量与光品质随着照明光源的推陈出新不断进步。近年来,LED作为路灯光源已广泛地应用在道路照明,用于功能性照明的LED护栏灯就是其中的典型代表。LED护栏灯[3-5]指集成安装在封闭式道路两侧防撞护栏上的LED灯具,其典型安装高度在离地0.8~1.2 m范围内。与传统安装在灯杆上的路灯相比,护栏灯与道路环境的集成度高、光的有效利用率高,并且其沿着道路两侧首尾相接的连续安装方式为驾驶员提供了更好的边界指示和方向引导;然而,接近路面安装的方式不可避免地带来新的应用问题。首先,这类LED护栏灯安装的间距、高度比(即距高比S/H)通常在4左右[6],这个参数决定了灯具必需是宽配光的设计方能实现照明标准所要求的路面照亮度均匀度;然而,护栏灯的安装高度恰好落在一般轿车驾驶员的眼睛高度范围内,宽的光束角会引起强烈的不舒适眩光,因此必须做截光设计。
对于这种照明方式营造的光环境,评价其照明质量和光品质将随着灯具形式和应用的不断创新而有所变化。传统的照明效果评估工作大多是在现场实地进行,通过现场测量照度、亮度等关键指标,对照照明应用标准,判断照明效果是否“合格”;少数具备条件的项目,会邀请体验者到现场对光环境根据科学定义的语义量表给出主观打分[7],或结合实验装置做反应时间等客观参数的测量[8-11]。现场实地的评估方式虽然能够直接反应该项目的具体情况,但不足在于现场条件(如安全、调光条件等)限制了能够使用的实验手段和研究变量的调节范围,难以支持科学完整的实验设计以发现深层次的应用问题。因此,我们设计并搭建了一套基于计算机仿真模拟的虚拟现实实验系统,用于实现沉浸式的光环境体验,作为体验平台,得到体验者对待评估光环境的主观评价;并在时间和空间上精确复现测试场景中视目标的照亮度指标与空间位置以作为测量反应时间和探测率等客观指标的专用设备,更全面客观地为光环境评估提供参考。
1 实验方法
1.1 实验装置
本研究涉及的实验装置全部安放在完全遮蔽光线的暗室中。实验装置如图1所示,由定制的遮光箱、高动态范围现实器、电脑主机和固定被试观察位置的医用颌托等几个主要部件组成。这些主要设备被安放在实验台上,以方便实验被试参与实验。
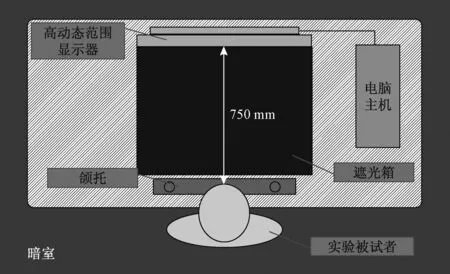
图1 实验装置
实验中所用到的显示器是FIMI-Philips 18′ SXGA (1280×1024)单色超高动态范围显示器,其显示亮度范围在0.0065 ~650 cd/m2。显示器亮度的标定使用亮度计Photo Research Spectra Duo PR 680。在实验中,被试者眼睛至显示器屏幕的观察距离被固定为750 mm,这一距离由颌托与显示器屏幕的相对位置来固定。图1为本实验定制的遮光箱能够完全遮蔽实验室中除来自于显示屏之外的干扰光线,进一步保证了实验参数的准确性。
1.2 虚拟现实场景设计
本实验所搭建的虚拟现实道路照明场景由两个主要部分组成。一是光环境背景,体现典型的护栏灯照明应用现场,背景中的路面亮度及其均匀度为实验的控制变量;二是探测目标,其出现的位置和时间受计算机程序控制,通过计算分析被试在同一光环境下正确探测视目标的探测率,从视觉功效的角度来评价照明质量。
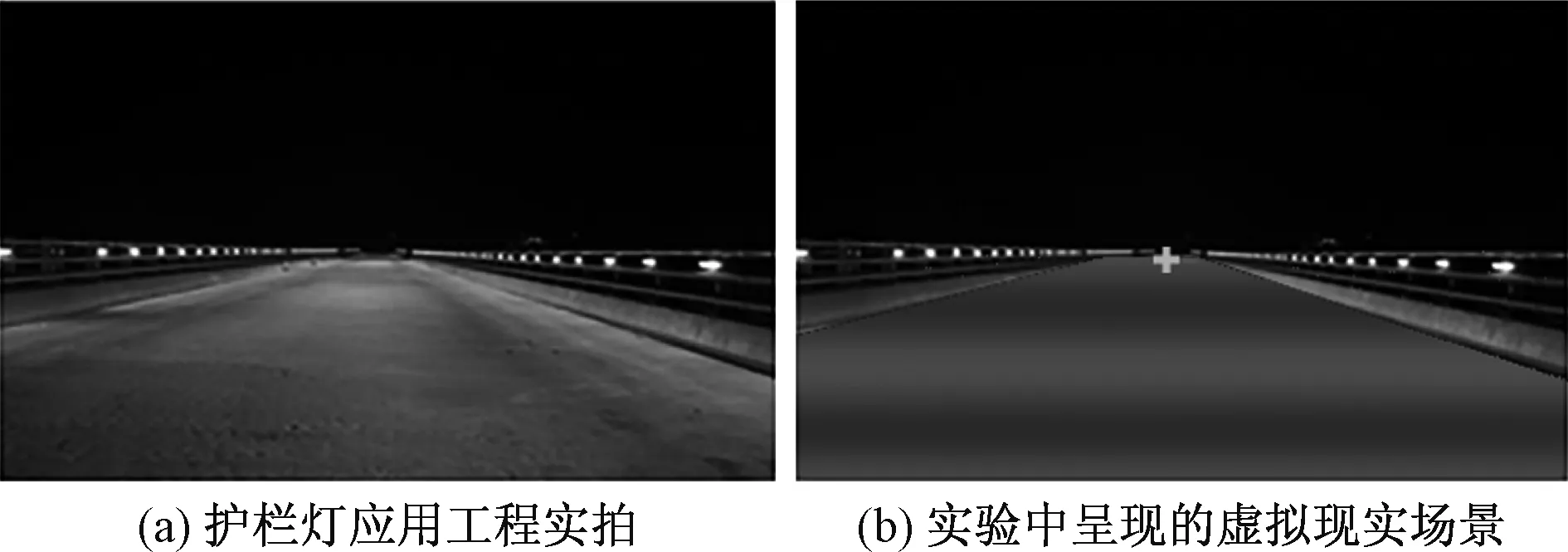
图2 护栏灯应用工程实拍和实验中呈现的虚拟现实场景
如图2所示,光环境背景中的道路表面,其平均亮度(Lave)和亮度均匀度(Ul)是主要的实验变量。在路面亮度图像的设置中,以呈正弦函数变化的灰度阶梯来填充路面区域形成路面明暗交替的条纹,条纹的局部亮度用亮度计加以测量,优化调整图像在实验装置中的亮度分布尽量接近现实情况。条纹的亮度分布设置见图3。为模拟汽车驾驶员驾车行驶中所观察到的道路照明效果,光环境背景中的路面亮度条纹以对标40 km/h的速度匀速滚动变化。
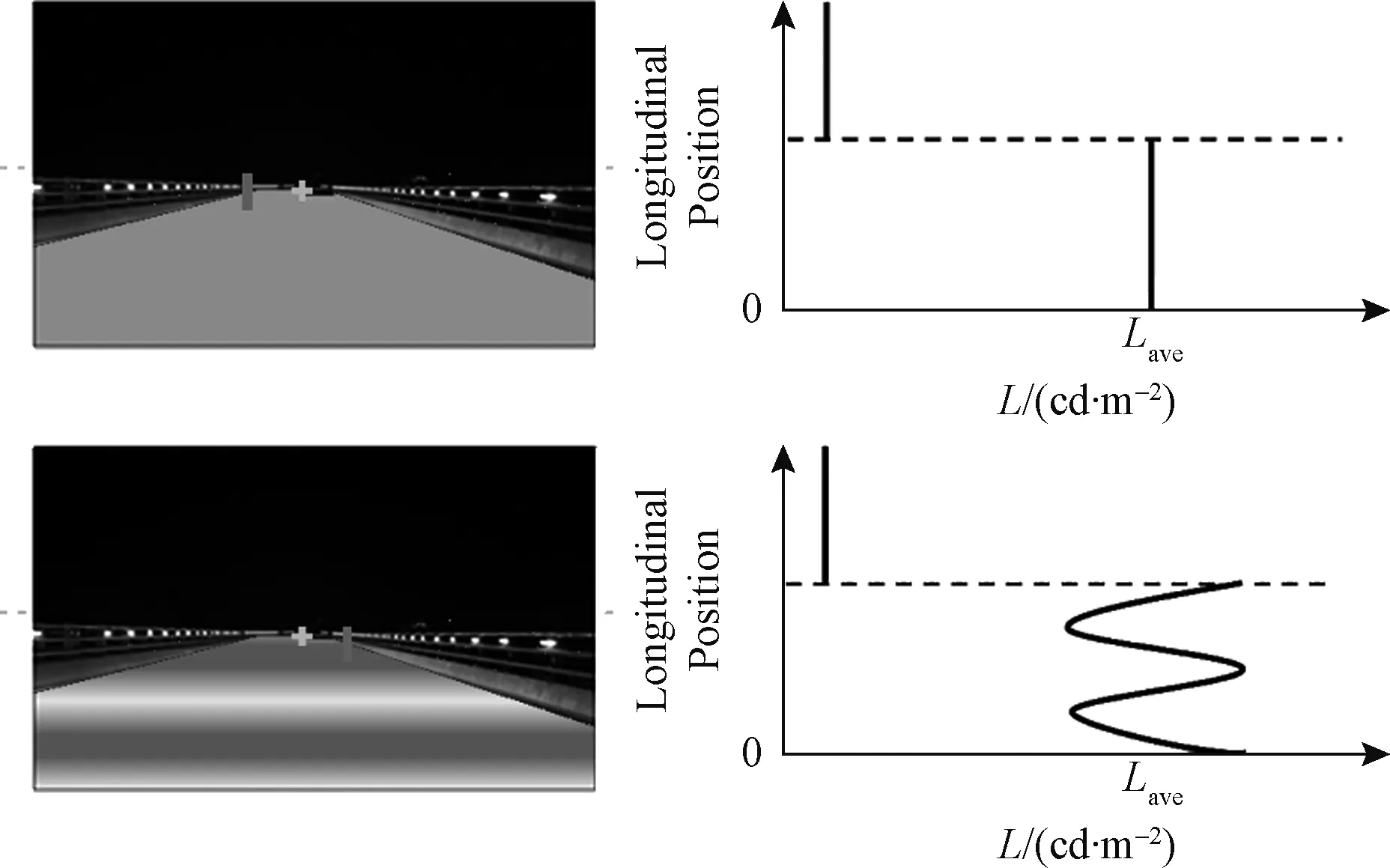
图3 实验场景的路面亮度条纹设置
场景中所出现的探测目标为等R/G/B值的灰度填充的矩形,其尺寸是根据实际道路中可能出现的行人的典型高度设定的。当探测目标的R/G/B值设置在2,对应用亮度计标定后的亮度值为0.2 cd/m2。实际实验中的探测目标亮度分5档,分别对应亮度0.34、0.36、0.4、0.43 cd/m2和0.46 cd/m2。探测目标在被试者视场中出现的位置也是被实验考察的变量,相对于设定的中央注视点,探测目标可能出现在2° 与10°视场角位置,分别对应于被试的中央视觉与周边视觉区域。在呈现的每幅实验场景中,探测目标仅可能有一个,出现位置或在中央注视点左侧或右侧。为预防被试的误报,在实验过程中随机设置了没有探测目标的空场景。
1.3 实验设计
本实验考察的自变量为路面的平均亮度(Lave)、亮度的纵向均匀度(Ul)以及探测目标出现的位置(P);因变量为被试观察并正确发现探测目标的正确率(Rc),具体定义为正确探测的数量与实验场景呈现的总数的比值。其中,对于场景中无探测目标的准确汇报计入正确汇报数目。测试的变量等级为3级,分别对应亮度标定后的亮度值1、4和16 cd·m-2;Ul亦分三档测试,分别为0.2、0.4和0.6;探测目标位置分两档,对应2° 和10°视场角。
本实验一共邀请了22位志愿者参加,其中12位为男性,10位为女性。他们的平均年龄为29.6岁,年龄标准差为2.5。被试在实验前经过视觉筛选,筛除了色盲的对象。在参与实验的全程,被试被要求保证矫正视力1.0以上。
每次实验仅有一名被试参与。实验具体流程如下:首先,由实验操作人员向被试者详细介绍实验背景和实验方法;在被试就位并同意开始实验后,关闭实验室灯光,进行20 min的暗适应;在暗适应过程中,实验员会向被试展示实验场景,探测目标并解释操作要求,在暗适应完成后,被试者会完成一套与主实验相似的练习组实验以确保完全理解实验操作过程。
在正式实验中,探测目标会叠加在光环境背景上出现。探测目标出现的时刻,实验系统会发出“哔”的提示音,被试者被要求当看到探测目标时,按下键盘的方向键以汇报“探测到目标”的时刻,出现在中央注视点左侧的探测目标,用键盘“←”汇报,出现在中央注视点右侧的探测目标,用键盘“→”汇报。当被试听到提示音但没有探测到视目标,用“空格”键汇报。
2 实验结果
以探测正确率为因变量,路面平均亮度、亮度均匀度和探测目标位置为自变量,整理实验结果数据如图4所示。可见,被试对视目标的探测率在中央视场范围(2°)高于周边视场(10°),特别是在低亮度场景中,这一差别更为明显。另外,随着视目标自身亮度的增加,对应的探测正确率数值分布上趋于收敛。这一趋势反映了视目标自身亮度越高,越容易被观察到。

图4 视目标探测率随实验参数的变化 (为均值;为中位数值)
为了分析平均亮度和亮度均匀度对视目标探测的影响,我们使用了IBM SPSS Statistics 20软件的方差分析(ANOVA)处理实验数据。在SPSS软件设置中,将探测正确率(Rc)设为因变量(dependent variable), 平均亮度(Lave)、亮度均匀度(Ul)和视目标位置(P)设为自变量,探测目标亮度(LT)设为协变量。分析结果显示,平均亮度(F=20.403, df=2,p<0.001)、亮度均匀度(F=769.211, df=2,p<0.001)、视目标位置(F=47.513, df=1,p<0.001)、视目标亮度(F=880.561, df=4,p<0.001)以及被试个体(F=3.661, df=21,p<0.001)均对目标探测的正确率有显著影响,并且平均亮度与被试个体间有显著交互作用(F=5.748,p<0.001),也就是说被试对视目标的成功探测率与视目标在视野中出现的位置相关,不同的被试个体间亦存在着显著的差异。对于平均亮度对视目标探测率的影响,本研究选择使用了ANOVA分析中的post-hoc函数,分析中将正确率设为因变量,Lave作为变量,软件分析结果显示在测试Lave与Rc负相关(F=36.29, df=2,p<0.001),即
Rc(Lave=1) >Rc(Lave=4) >Rc(Lave=16)
这与一般理解正好相反。我们分析原因,这有可能是由于路面区域的亮度形成的光幕亮度叠加在视目标上,降低了视目标和其周边背景的对比度所致。因此,对于LED护栏道路照明,路面平均亮度并非越高越好。
对于路面背景亮度均匀度的分析,同样使用了post-hoc ANOVA,将探测正确率(Lave)设为因变量,亮度均匀度(Ul)作为变量。分析结果显示Ul与Rc正相关(F=31.17, df=2,p<0.001),这一结果可用下式表示:
Rc(Ul=0.2) 这说明提高路面亮度均匀性对保障驾驶安全性有帮助,然而,我们也发现均匀度为0.6和1的两种情况下的视目标探测率不存在显著差异,因此也不需要无限度地提高亮度均匀性。 本研究主要通过虚拟现实构建的道路照明场景进行实验被试对视目标探测率的测定,研究了亮度和亮度均匀性水平对道路视目标检测的影响。数据分析得出的主要结论是,实验中模拟的亮度(Lave)和纵向均匀性(Ul)影响了实验参与者的视觉性能。在LED护栏灯的具体道路照明应用中,宜将道路表面平均亮度水平设定在1 cd/m2左右,与一般道路照明的亮度要求大致相同;道路表面的纵向亮度均匀度宜定在0.6,过高地追求亮度及其均匀度并不能相应地提升道路照明质量。 亮度的纵向均匀性(Ul)高,被试对视目标的探测率也高。这一结论与Walthert[12, 13]在1973年和1975年的相关研究Ul结果相一致,其实验发现实验对象对视目标的探测速度随U1的下降而降低。本实验同时揭示了当Ul高于0.6之后,其数值的进一步增加对视目标的成功探测率并无帮助。这一结论从应用的角度看来,有其合理性:当路面的亮度均匀度高于一定阈值时,均匀度的提高将不会带来整体照明质量的提升。这一点同样得到Scott[14]和Jackett[15]相关研究结论的支持。特别的,Jackett[15]基于新西兰全境机动车碰撞事故统计分析(2006—2010)的统计数据是对本研究的一个很好的补充。除此之外,本实验对比了被试在2°和10°视场的视觉灵敏度,验证了人的视觉灵敏度在中央视场区域高于周边视场区域。 本实验为LED护栏灯的规范化应用提供了设计和评估参考,更重要的是我们尝试了将虚拟现实照明光环境体验应用在照明效果评估上并得到了量化的光品质描述,为照明应用研究提供了新的研究手段和实验方法。我们还将在后续的研究工作中进一步完善虚拟现实光环境模拟平台,实现真正的沉浸式体验效果并努力复现现实场景中光刺激量的绝对强度和正确分布。3 总结与展望