抗高过载硅微杯型振动陀螺结构设计与仿真
2019-09-25曹慧亮石云波
刘 俊,曹慧亮,石云波,唐 军,申 冲
(中北大学电子测试技术国防科技重点实验室,太原030051)
0 引言
目前,发展低成本、高效益的精确制导炮弹是现代化国防战术武器的重要组成部分。在制导炮弹的发射过程中,弹药要经历巨大的过载作用以加速到预期的发射初速度。雷声公司和BAE公司瑞典博福斯分公司向美国陆军交付的 “神剑XM982”制导炮弹发射时的出膛速度超过700m/s,该过载过程的幅度峰值可达10000g以上(g为重力加速度)[1]。通过在火炮中增加惯性制导系统的方法可为弹道修正提供基准,可有效提高炮弹的命中精度[2],研究抗高过载的高性能微机械陀螺具有很大的现实意义。
本文基于MEMS技术提出了一种新型的抗高过载硅微杯型振动式陀螺,依靠杯口的微小变形敏感输入角度,避免了线振动、角振动等微机械陀螺结构中活动质量块受过载影响大的问题。对该杯型陀螺结构进行了动力学仿真,并基于冲击动力学原理对杯型陀螺进行了瞬态动力学仿真分析,验证了该杯型陀螺结构的抗高冲击能力[3]。
1 硅微杯型谐振陀螺设计
本文提出的基于MEMS的硅微杯型陀螺结构如图1所示,整体结构是由杯型谐振子、均布在杯型谐振子外的4个驱动电极和4个检测电极构成。当驱动电极的输入信号频率与陀螺谐振子的固有频率一致时,可激励出谐振子在驱动轴方向的 “圆-椭圆”弯曲振动[4]。采用电容式静电驱动检测原理,该杯型陀螺结构具有微加工工艺简单、电路功耗低等优点。
振动式微机械陀螺有两个工作模态:驱动模态和检测模态。这两个模态都可以看作是 “弹簧-质量块-阻尼”的二阶振动系统[5],其基本模型如图2所示。
振动式微机械陀螺正常工作时,质量块在周期性驱动力的作用下沿X轴以固定频率做受迫振动。当与受迫振动方向垂直的Z轴方向上有角速率Ωz输入时,由于哥氏效应的作用,质量块在垂直于受迫振动及角速度输入方向的第三个方向即Y轴方向上振动。根据振动学原理,陀螺的驱动方向和检测方向的动力学方程为[6]
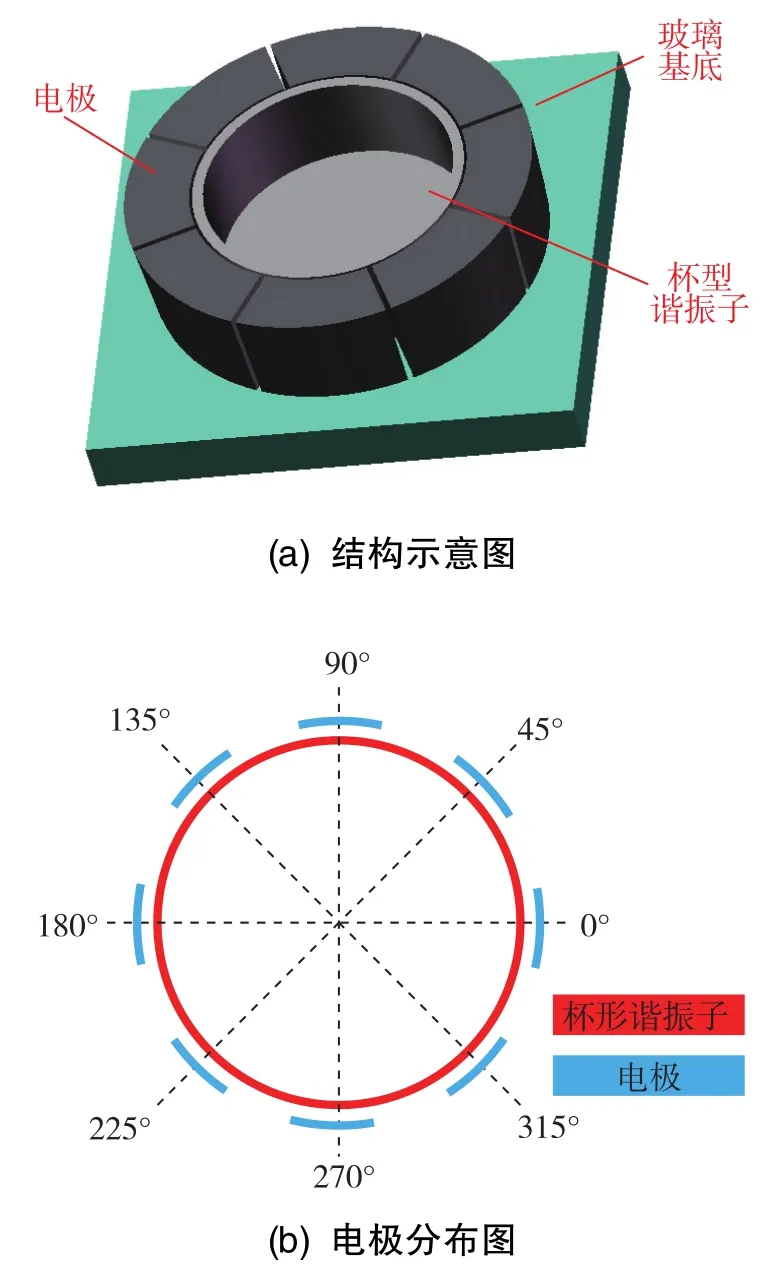
图1 硅微杯型陀螺结构示意图Fig.1 Structure schematic diagram of Silicon microcup gyroscope
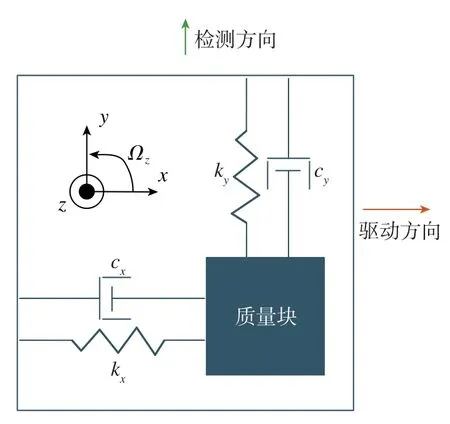
图2 振动陀螺二阶系统示意图Fig.2 Schematic diagram of vibratory gyroscope second-order system

式(1)中,Mx、My分别为驱动模态、检测模态的等效质量,cx、cy分别为驱动方向、检测方向上的阻尼系数,kx、ky分别为驱动方向、检测方向上的弹性系数,fx为驱动力,Ω为角度增益,fy为检测反馈力。当输出信号检测采用开环工作方式时,fy=0。
硅微杯型谐振陀螺的运动原理与常见的环形陀螺一样,都是根据弹性驻波的惯性原理来工作的,杯口的微小变形(主要振动形式)形成 “圆-椭圆”的弯曲振动[4],如图3所示。但是,杯型结构在理论上有更好的抗高过载特性。在结构支撑方面,相比于同样采用四波腹形变工作原理的环形结构,杯型结构设计简单且与基底的连接更为牢固,具有更好的抗过载性能(半球壳和环形结构大都采用单点或多点固定支撑,而杯型结构杯壁和杯底为统一整体,杯底和基底为平面粘合固定)。
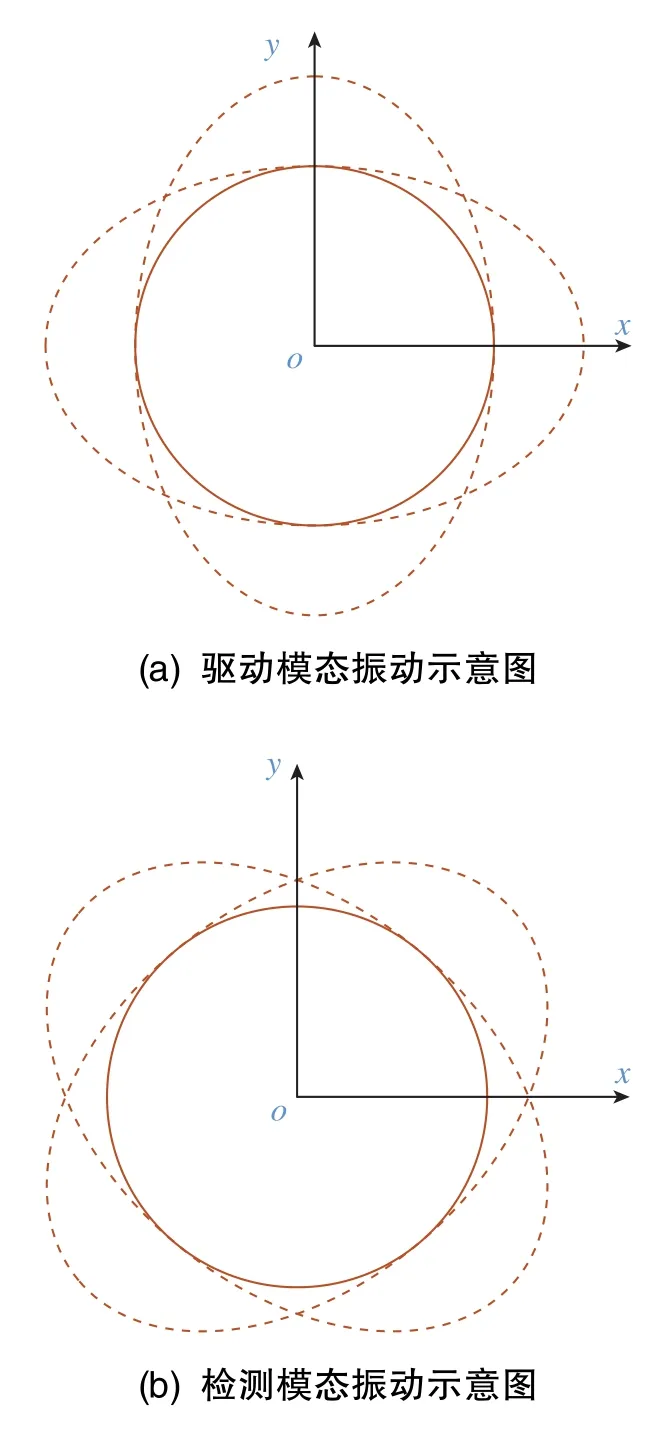
图3 杯型陀螺振动示意图Fig.3 Vibration schematic diagram of cup-type gyroscope
2 振动特性分析
2.1 模态分析
模态分析可以用来确定陀螺结构的振动特性,如固有频率、振型、振动平稳性等[7]。首先,利用ANSYS软件建立所设计的杯型陀螺结构有限元模型,然后进行模态分析,提取工作模态的仿真结果。图4为第五阶陀螺驱动模态、第六阶陀螺检测模态的模态分析结果,前十阶模态的固有频率如表1所示。
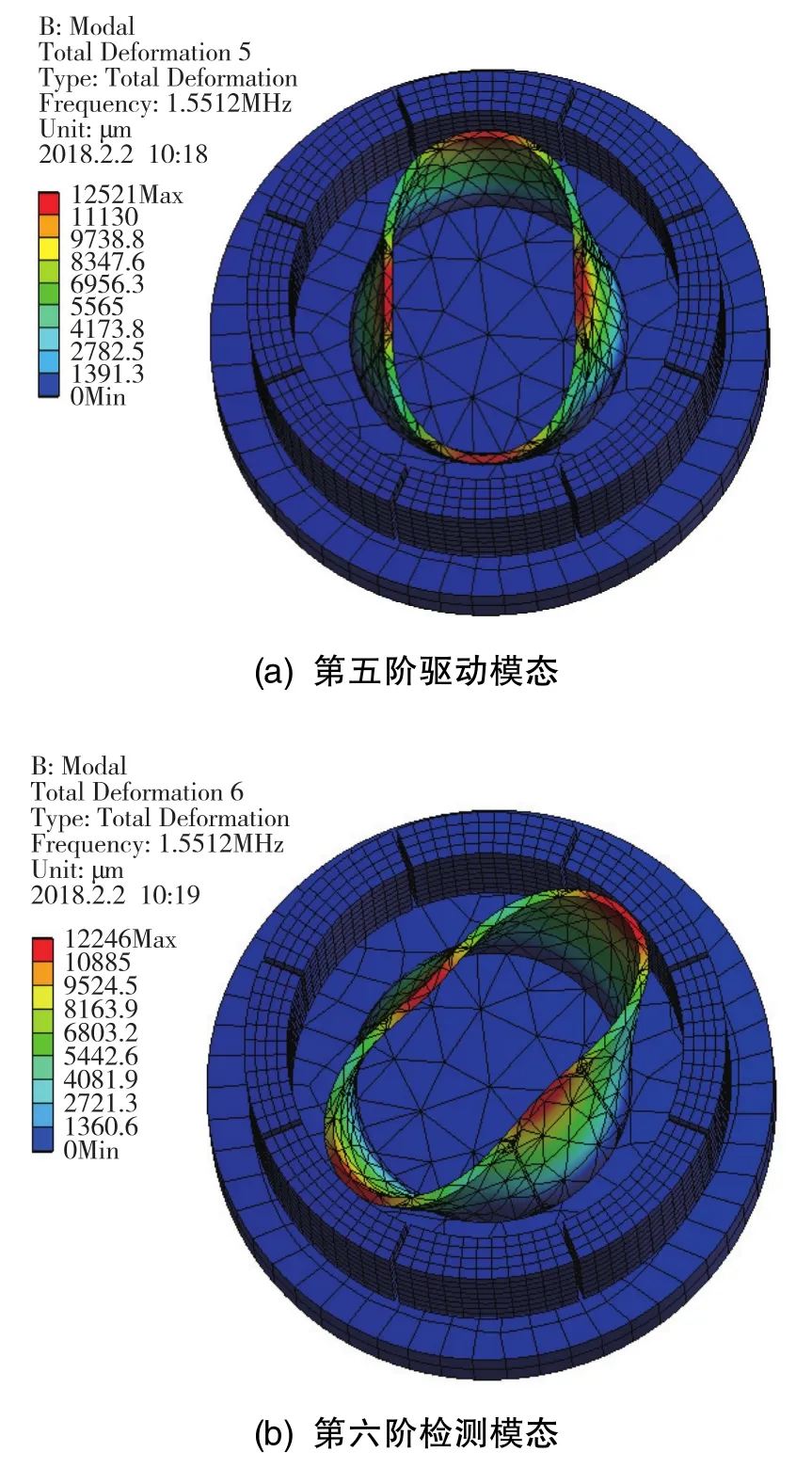
图4 杯型陀螺的驱动模态和检测模态示意图Fig.4 Driving modal and detection mode schematic diagram of cup-type gyroscope

表1 杯型陀螺前十阶模态固有频率Table 1 The first ten modal natural frequencies of cup-type gyroscope
在结构设计时,需要工作模态与干扰模态的频差尽可能大,以减小模态之间的相互干扰。驱动模态与敏感模态的固有频率完全相等时,陀螺的灵敏度最高,但是会导致带宽降低。因此,驱动频率和检测频率也需要一定的频差[8]。表1中,第五阶驱动模态、第六阶检测模态是本文需要提取的工作模态,其余模态为陀螺的干扰模态。由表1可得,该杯型结构的工作模态与干扰模态的最小频差Δf1=163.8kHz,驱动模态和敏感模态的频差Δf2=0.8kHz。可以看出,杯型结构既可以远离环境振动的干扰,也能在较高灵敏度的基础上保证带宽,从而实现较高的抗高过载性能。
2.2 谐响应分析
谐响应分析是一种特殊的时域分析方法,用于分析持续的周期载荷在结构系统中产生的持续周期响应以及确定结构受随时间按简谐规律变化的载荷时稳态响应。硅微杯型谐振陀螺谐振结构的谐响应分析主要目的是计算结构在静电力作用下的位移响应,得到硅微杯型谐振陀螺结构的幅频响应曲线。经过扫频仿真分析,观察杯型陀螺谐振子在何频率点出现谐振峰值,并获得该峰值的大小。
在杯型陀螺结构杯壁上的驱动方向与检测方向分别施加相向的幅值为1μN的简谐力,加载后的杯型结构X轴方向与Y轴方向杯壁的振动幅频特性如图5所示。X轴方向在整个频段上只在1.5515MHz处出现了一个谐响应峰值点,即为谐振结构的驱动谐振频率。同理,加载后的杯型结构Y轴方向只在1.552MHz处出现了一个谐响应峰值点,即为谐振结构的检测谐振频率。
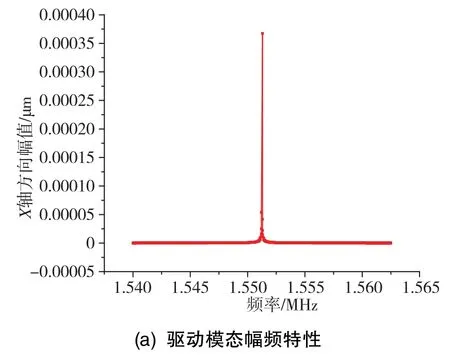
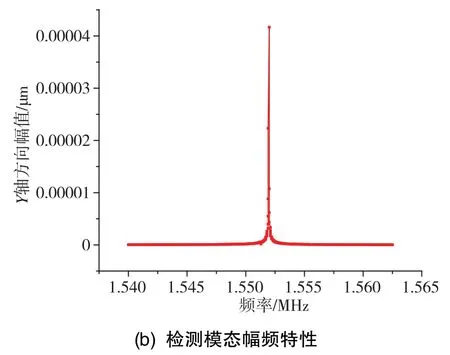
图5 驱动方向与检测方向的谐响应图Fig.5 Harmonic response diagram of driving direction and detection direction
3 抗高过载特性分析
3.1 冲击动力学原理
在陀螺工作期间受到的冲击一般都是不规则的脉冲形状,可以近似为一系列简单冲击脉冲的叠加。冲击定义为短时间施加于物体的载荷作用,常见的有半正弦脉冲、锯齿脉冲等。在实际应用中,多为半正弦脉冲。本文采用半正弦脉冲模拟陀螺实际过载情形,如图6所示[9]。
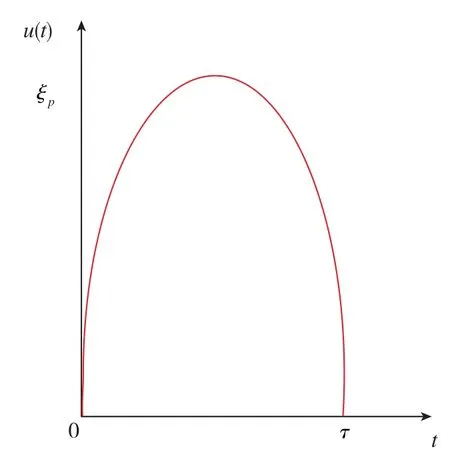
图6 半正弦脉冲示意图Fig.6 Schematic diagram of half-cycle sinusoidal pulse
半正弦加速度脉冲表达式如下
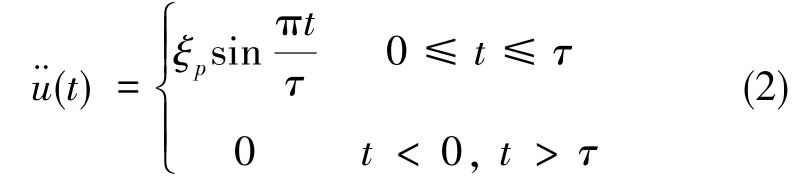
式(2)中,τ为加速度载荷持续时间,ξp为冲击峰值。
本文重点关注陀螺振动结构的抗过载能力,在建模时主要考虑振动结构和其周围刚性连接体之间的动力学特性。在此情况下,当陀螺结构受Z轴方向冲击时,其动力学方程为

式(3)中,ξ、ωn分别为陀螺Z轴方向平动振型模态的阻尼比和固有频率,为外界传递至刚性连接体的加速度载荷,z为振动结构M相对刚性体的位移。
3.2 冲击动力学仿真
陀螺在特定领域应用时,需要经受一定程度的瞬态加速度冲击。这类冲击载荷作用时间短、峰值高、变化快,使得陀螺产生了很大的冲击应力,容易损坏谐振结构。瞬态冲击响应分析可以计算谐振结构在瞬态加速度冲击作用下的位移响应与应力响应,得出其承受的最大变形及最大应力,从而确定MEMS陀螺能够承受的冲击载荷的大小[9]。分别在MEMS杯型谐振结构的X轴方向、Z轴方向施加100000g的半正弦周期冲击载荷,采用ANSYS的瞬态分析模块进行仿真。
在X轴方向施加如图6所示的加速度载荷,瞬态冲击仿真的位移和应力云图如图7、图8所示。可以看出,陀螺结构的最大位移为1.59nm,所受的最大应力为0.81MPa,远远低于790MPa的极限许用应力,这表明该杯型陀螺谐振结构可以承受X轴方向100000g的瞬态冲击。
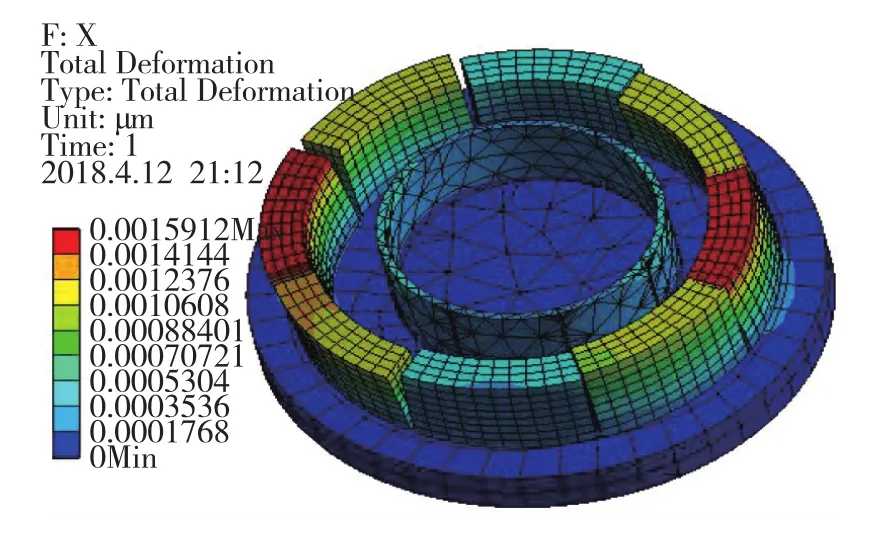
图7 X轴承受100000g条件下的结构位移云图Fig.7 Structure displacement nephogram of X-axis under the condition of 100000g
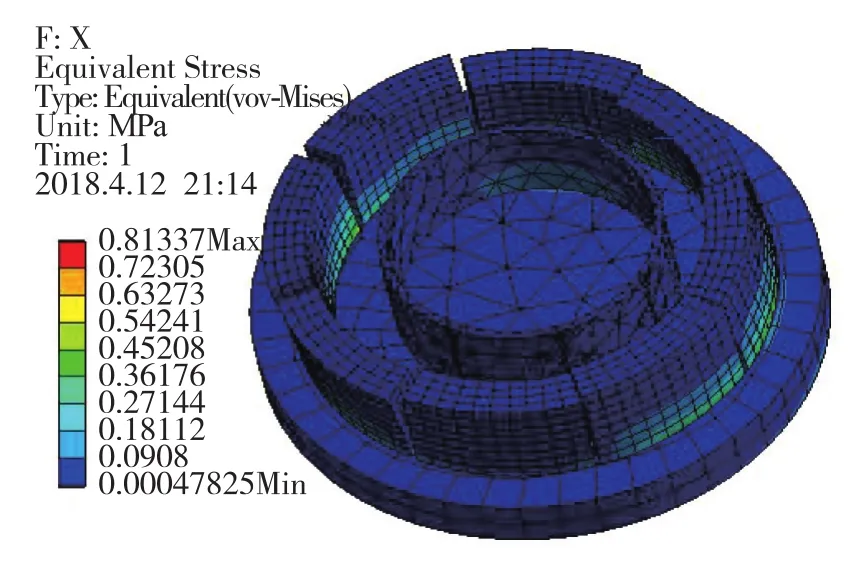
图8 X轴承受100000g条件下的结构应力云图Fig.8 Structure stress nephogram of X-axis under the condition of 100000g
在Z轴方向施加如图6所示的加速度载荷,瞬态冲击仿真的位移和应力云图如图9、图10所示。可以看出,陀螺结构的最大位移为8.06nm,所受的最大应力为11.38MPa,远远低于790MPa的极限许用应力,这表明该杯型陀螺谐振结构可以承受Z轴方向100000g的瞬态冲击。
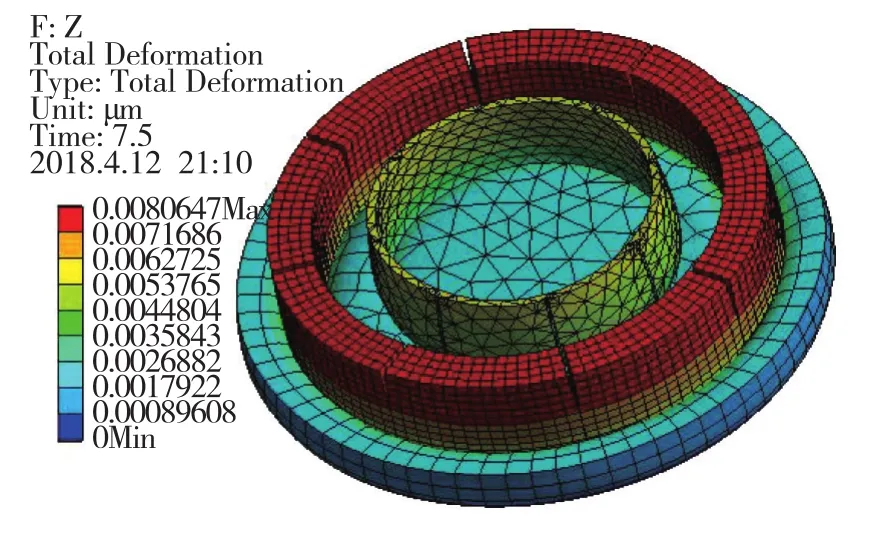
图9 Z轴承受100000g条件下的结构位移云图Fig.9 Structure displacement nephogram of Z-axis under the condition of 100000g
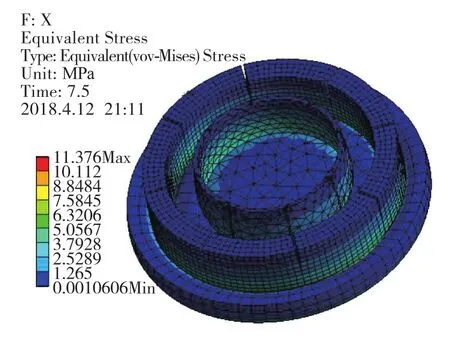
图10 Z轴承受10000g条件下的结构应力云图Fig.10 Structure stress nephogram of Z-axis under the condition of 100000g
4 结论
本文提出了一种新型的抗高过载硅微杯型振动式陀螺,分析了其工作原理、振动特性以及其抗高过载特性。在ANSYS有限元分析软件中建立了该硅微杯型陀螺结构的有限元模型,分别进行了模态分析、谐响应分析。仿真分析结果显示,该杯型陀螺驱动模态和敏感模态固有频率的频差为0.8kHz,既可以远离环境振动的干扰,也能在较高灵敏度的基础上保证带宽,可以在结构上实现较高的性能。根据冲击动力学原理分析了此结构在半周期正弦加速度冲击载荷作用下的冲击响应,谐振结构在100000g的瞬态冲击作用下最大应力为11.38MPa,结构最大位移为8.06nm,可以正常稳定工作。基于以上分析得出,该硅微杯型振动陀螺在抗冲击方面有较高的性能,这为我国惯性制导领域拓宽了研究方向。
