自走式红枣捡拾机的设计
2019-09-24王洪昌李燕梅砚晨潘涛袁昊曾荣
王洪昌 李燕 梅砚晨 潘涛 袁昊 曾荣

摘要 由于红枣矮化密植的特点,红枣收获大多依靠人工,效率低下,劳动强度大。为解决这一问题,在已有红枣捡拾机器的基础上,基于负压产生气吸的原理设计了一种自走式红枣捡拾机,该机器主要由收集装置、清选装置、行走机构、传动机构、动力系统和底盘组成。利用负压收集红枣,該设计能有效减少红枣捡拾过程中的冲击损坏,具有初步清选的功能,并且实现了自走,提高了劳动效率。
关键词 红枣;捡拾机;自走式;气吸式
中图分类号 S225文献标识码 A
文章编号 0517-6611(2019)15-0208-03
doi:10.3969/j.issn.0517-6611.2019.15.057
开放科学(资源服务)标识码(OSID):
Abstract Due to the characteristics of dwarf dense planting of red jujube, the harvest of red jujube mostly depends on artificial operation,which is of lowefficiency and highlabor intensity. In order to solve this problem, on the basis of the existing red jujube picking machine, a selfpropelled red jujube collector was designed based on the principle of gas suction generated by negative pressure. The collector is mainly composed of collecting component, clearing device, walking mechanism, transmission mechanism, power system and chassis. The negative pressure was used to collect red jujube, this design could effectively reduce the impact damage in the process of collecting red jujube, it had a preliminary cleaning function, which could realize selfpropelled function and improve the labor efficiency.
Key words Red jujube;Collector;Selfpropelled;Gas suction
基金项目 华中农业大学大学生科技创新基金项目(2018233);国家自然科学基金青年项目(51605182)。
作者简介 王洪昌(1984—),男,河南太康人,讲师,博士,从事农业机械仿生理论与技术研究。
收稿日期 2019-04-01
红枣是我国的特色林果,是一种重要的经济作物,含有丰富的维生素,食用价值和药用价值很高。由于红枣在矮化密植种植模式下产量高、生产效益好,矮化密集种植已成为红枣种植的主要方式[1-2]。传统的红枣收获方法为人工敲打枣树枝,枣落地后人工捡拾,这不仅劳动量大,而且效率低下[3]。近年来,农业工作者急剧减少,采摘劳动力出现短缺。红枣捡拾产业的机械化也迫在眉睫。因此,设计一种自走式红枣捡拾机,对杂物进行初步清理,并且能有效保证红枣的质量,且可以暂时储存大量红枣。
目前市场投入使用的红枣摘选机有机械式和气吸式2种[4]。机械式捡拾机有捡拾辊式和滚筒毛刷式,但会对红枣造成损伤,利用振动装置,达到枣树分离的目的,但此种方式会对枣树造成损伤。市场上现有的气吸式捡拾机(如YE3600型)[5]对红枣或者枣树没有造成较大的损伤,但不足之处是此机器效率低,由于机器密封,倒出红枣比较繁琐,且没有自走功能。
现有的气吸式红枣捡拾机功耗较大,具有初步清选和自走功能的较少。针对现有的问题,笔者设计了一种自走式红枣捡拾机,该机器基于负压原理直接从地上捡拾红枣,并对红枣进行初步清选,旨在实现高效捡拾红枣的过程中对红枣进行清选,同时具有自走的功能,优化红枣收集和倾倒装置,有效提高红枣捡拾的工作效率。
1 自走式红枣捡拾机的设计
1.1 结构
针对红枣矮化密集种植模式,设计了一种气吸式的自动红枣捡拾机。红枣捡拾机整机底盘为三轮结构,具有较强的稳定性,且能实现转向功能,主要结构包括机架、风机、风箱、闭风器、波纹管、集枣箱、清选系统、行走机构和传动系统(图1)。吸管与风箱相连,风箱与闭风机相连,闭风机与清选机相连。当捡拾机工作时,风机旋转产生负压,红枣被风机所产生的负压吸取,通过波纹管进入风箱,因重力落入闭风器,闭风器转动使得红枣落入清选系统。清选系统中的风机将杂质吹出,清选后的红枣落入收集箱,箱体后方有一开口,便于集枣箱的更换。前轮为万向轮,动力系统将动力通过传动系统传到行走轮上,从而实现机器的自主行走。
1.2 工作原理
启动柴油机后,通过联轴器、皮带轮等传动机构将动力传送给风机、闭风器等装置。大风机处于工作状态时,在真空室中产生负压,红枣通过气吸管被吸取。闭风器工作,阻止外来空气进入,保证捡拾的红枣能够连续不断地及时排出,落入收集箱中;柴油机的动力通过减速器减速,传递给小风机,小风机产生较小的风力,清除杂质;此机器的前轮为万向轮,可以方便地调整行走方向,后轮通过柴油机提供的动力驱动,由离合器控制,实现自走功能。
2 关键部件设计
2.1 闭风器的设计
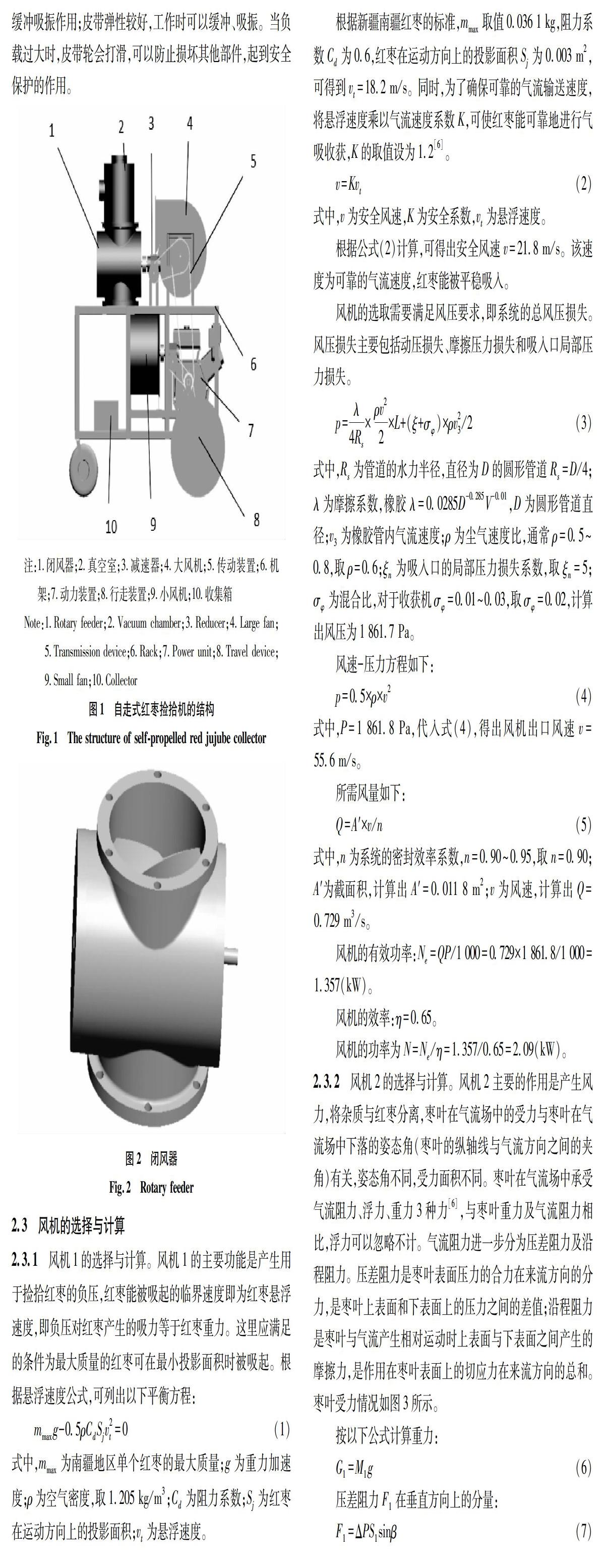
该机器的创新之处在于增加了闭风器(图2),其主要功能是将红枣连续不断地及时排出,同时阻止外空气进入,具有良好的密封性。该闭风器是由带有数片叶片的转子叶轮、壳体、密封件等组成。叶轮采用敞开式,既能起到防止堵塞的作用,又減轻了机重,缩小了外型。
2.2 传动系统的设计
自走式红枣捡拾机的传动系统主要由联轴器、皮带轮组成。动力分别通过2个皮带轮传递到风机、行走轮、闭风器中。皮带传动具有简单的结构,低成本和缓冲吸振作用;皮带弹性较好,工作时可以缓冲、吸振。当负载过大时,皮带轮会打滑,可以防止损坏其他部件,起到安全保护的作用。
2.3.2 风机2的选择与计算。
风机2主要的作用是产生风力,将杂质与红枣分离,枣叶在气流场中的受力与枣叶在气流场中下落的姿态角(枣叶的纵轴线与气流方向之间的夹角)有关,姿态角不同,受力面积不同。枣叶在气流场中承受气流阻力、浮力、重力3种力[6],与枣叶重力及气流阻力相比,浮力可以忽略不计。气流阻力进一步分为压差阻力及沿程阻力。压差阻力是枣叶表面压力的合力在来流方向的分力,是枣叶上表面和下表面上的压力之间的差值;沿程阻力是枣叶与气流产生相对运动时上表面与下表面之间产生的摩擦力,是作用在枣叶表面上的切应力在来流方向的总和。枣叶受力情况如图3所示。
按以下公式计算重力:
压差阻力F1在垂直方向上的分量:
沿程阻力F2在垂直方向上的分量:
其中,枣叶的上表面区域和下表面区域的气流速度不同,下表面的气流速度大于上表面的气流速度。
气流阻力在垂直方向的合力:
也可以写成:
式中,P为枣叶上表面受到的气流压力,单位为N/m2;
ΔP为枣叶上下表面的压力差,单位为N/m2;
β为枣叶落下时与气流之间的夹角;
f为摩擦系数,与枣叶的形状、气流的运动状态有关。
根据伯努利方程可知,在流体运动中忽略了黏性损失,单位质量流体携带的总能量(位能、压能、动能)在其流经的路程前后位置时保持恒定,由于气流的比重非常小,因此可以忽略位能。为了计算悬浮速度,将压力能转换为动能,公式(10)可写为:
式中,c为压差系数;V为气流速度,单位为m/s;K0为试验系数;γ为空气比重,单位为N/m3。
当气流阻力等于红枣重力时,枣叶处于悬浮状态,气流速度即为悬浮速度,即:
换算成悬浮速度:
Vf是在无限气流场中计算得到的枣叶悬浮速度的公式。然而,在实践中枣叶的清选分离是在有限的管道中进行的,因此必须考虑由枣叶占据管道有限面积引起的气流变化。根据雷诺数的大小,气体在管道中的流动可分为层流和紊流。层流中,气流的速度从管壁到轴心成抛物线分布,其平均速度仅为轴心处最大速度的50%;紊流中,速度呈指数分布,其平均速度为最大速度的0.80~0.85倍。综上可知,枣叶在有限气流中悬浮速度VL如下:
式中,K1为气流的状态系数,与气流状态和管道中气流的能量损失有关;j为枣叶与管道总面积之比。
VL是在有限气流场中获得的枣叶悬浮速度,是简单分析在气流场中单个枣叶的受力,但枣叶都是成群出现,相互碰撞并相互作用。该研究不考虑枣叶和红枣之间的相互作用。由于枣叶的姿态角为0~π/2,因此可以认为在每个姿态角处的枣叶是等概率的。因此,可得出枣叶在有限气流管道中的平均悬浮速度:
式中,G1=M1g=0.4×10-3×9.8=3.92×10-3(N), S1=0.116 m2, K1=0.4,φ=0.333,K0=0.6,c=0.609。
经计算得出,红枣枣叶的悬浮速度为2.73 m/s。
2.3.3 风机的选型。
该机器风机如图4、图5所示。在农业生产中,清选设备主要有农用型离心风扇和通用型离心风机2种[7]。吹出型风机大部分为农用型,吸入型装置则为通用型。吸入型清选装置采用的通用型风机,大多为螺旋蜗壳型壳体。单面进风,叶轮直径为250~400 mm,转速1 600~1 900 r/min。 通过选型,可确定使用风机型号为L-09系列风机[8]。
3 结语
该研究针对目前红枣捡拾存在的问题,基于负压原理设计了一种自走式红枣捡拾机,该机器主要由收集装置、清选装置、行走机构、传动机构、动力系统和底盘等组成。通过对该自走式红枣捡拾机的研究发现,机具结构合理,方案可行。该机的优点在于通过气吸原理实现自动化捡拾红枣的功能,提高了劳动效率。机械采收效率约比人工采收提高4~5倍[9];具有一定的清选功能;采用气吸式收集,对红枣的损伤较小。目前该机械的不足之处在于
该机器仍需要人工手持捡拾管收集红枣,人工控制机器前进方向,后续将进行进一步试验研究,从结构和功能上对该机器进行优化,从而实现高效率的自动化红枣捡拾作业。
参考文献
[1]张亚欧,坎杂,李成松,等.矮化密植红枣收获机捡拾装置的设计[J].农机化研究,2016,38(4):71-75.
[2]孟祥金,陈永成,汤智辉,等.4SZS型手持式大枣振动收获机的研制[J].新疆农机化,2013(5):7-8.
[3]党凯锋,张鹏霞,杨震,等.一种气吸式红枣捡拾收获机的研制[J].农产品加工,2017(16):31-34.
[4]潘俊兵.气吹式落地红枣捡拾装置设计与试验[D].石河子:石河子大学,2018.
[5]鲁兵.电动自走式落地红枣清扫捡拾机的设计与试验研究[D].阿拉尔:塔里木大学,2017.
[6]史高昆,马少辉.气吸式红枣捡拾机设计与试验[J].农业工程,2014,4(3):109-112.
[7]陈光.风筛式红枣清选机的设计与试验研究[D].阿拉尔:塔里木大学,2016.
[8]续魁昌,王洪强,盖京方.风机手册[M].2版.北京:机械工业出版社,2011:7-11
[9]艾建军,高韶坤,刘建敏,等.大枣收获机设计[J].江苏农业科学,2015,43(12):434-436.
