乌江思林水电站升船机控制系统设计
2019-09-23周畅游醋院科
周畅游,醋院科,肖 鹏
(1.华电电力科学研究院有限公司,浙江 杭州310030;2.贵州黔源电力股份有限公司,贵州 贵阳550002)
0 引言
思林水电站的通航建筑物方式采用一级垂直升船机型式。升船机的建筑物按照下游至上游的方向依次布置有:下游引航道(隔流堤及靠船墩)等建筑物、下闸首、垂直升船机主体、上闸首、上游引航道(其中包括锚固墩、靠船墩、浮堤)等设施。
升船机的提升方式采用了钢丝绳卷扬全平衡垂直提升型式。当有船舶通过大坝主体时,首先要通过上下闸首的卧倒门进入承船厢。承船厢通过钢丝绳与另一端的平衡重连接,并依靠位于主机房位置的4台功率为200 kW电力驱动,承船厢沿大坝垂直方向上下运行以达到运送船只过坝的目的。
1 控制系统设计原则
根据乌江思林升船机工程特殊要求,升船机控制系统的设计原则与要求如下:
(1)根据流程平稳、准确、灵活、安全可靠、协调地控制与监视升船机全行程运行。
(2)分布式2层控制结构。
(3)操作方式主要控制采用主控级控制,辅助控制为现地控制,现地控制与主控级控制相互独立,其中现地控制可以独立完成升船机上下运行的整个流程。
(4)原则上采用共用速度环完成多电机传动并能实现多电机出力的均衡控制方式。
(5)当上、下游水位发生较大、较快速的变化时,承船厢能够准确停位。
(6)船厢按S型速度曲线平稳运行。
(7)完善的安全保护措施。
(8)关键部件的热备和冗余设计。
(9)通航指挥系统、广播系统等通航监控调度手段。
2 控制系统组成
升船机的控制系统设备主要由检测系统等设备、计算机监控系统、工业电视系统、广播系统组成[1-2]。
计算机监控系统采用2层分布式控制结构,即系统分为主控级和现地子站级2层。
主控级设置监控站。1台数据库服务器,1台网络服务器、1台工程师/培训员工作站和1台多媒体计算机。在升船机集控室内布置有主控级设备。
计算机监控系统现地子站级由:主提升机房现地控制子站、主提升传动控制子站、上闸首卧倒小门现地控制子站、上闸首现地控制子站、承船厢A泵站现地控制子站、下闸首卧倒小门现地控制子站、下闸首现地控制子站、承船厢B泵站现地控制子站等8个现地控制子站(LCU)组成[3-4]。
升船机设置1套广播系统和1套工业电视系统,在上闸首、上闸首卧倒门、主机房、下闸首、下闸首卧倒门、承船厢等部位设有音频及视频设备,以便于指挥和监视船只在升船机区域的运行。
3 控制系统设计
思林升船机的控制工艺较复杂、控制对象较多、设备布置较分散。基于以上特点和思林升船机的运行控制要求,控制系统的控制结构采用分布式的双层控制结构,分别设置位于中心控制室的集中监控管理级计算机和位于各子系统的控制级控制器。思林的计算机监控系统采用SIEMENS公司的PCS7计算机监控系统,升船机系统的流程控制实时监视、通航指挥、单机构调试依靠计算机监控系统实现。该系统具有实时数据处理、故障报警及应对处理、升船机自动控制、多媒体管理、人机对话、升船机系统时钟同步、历史数据管理、网际通信、本地网络通信等功能,具体监控系统结构如图1所示。
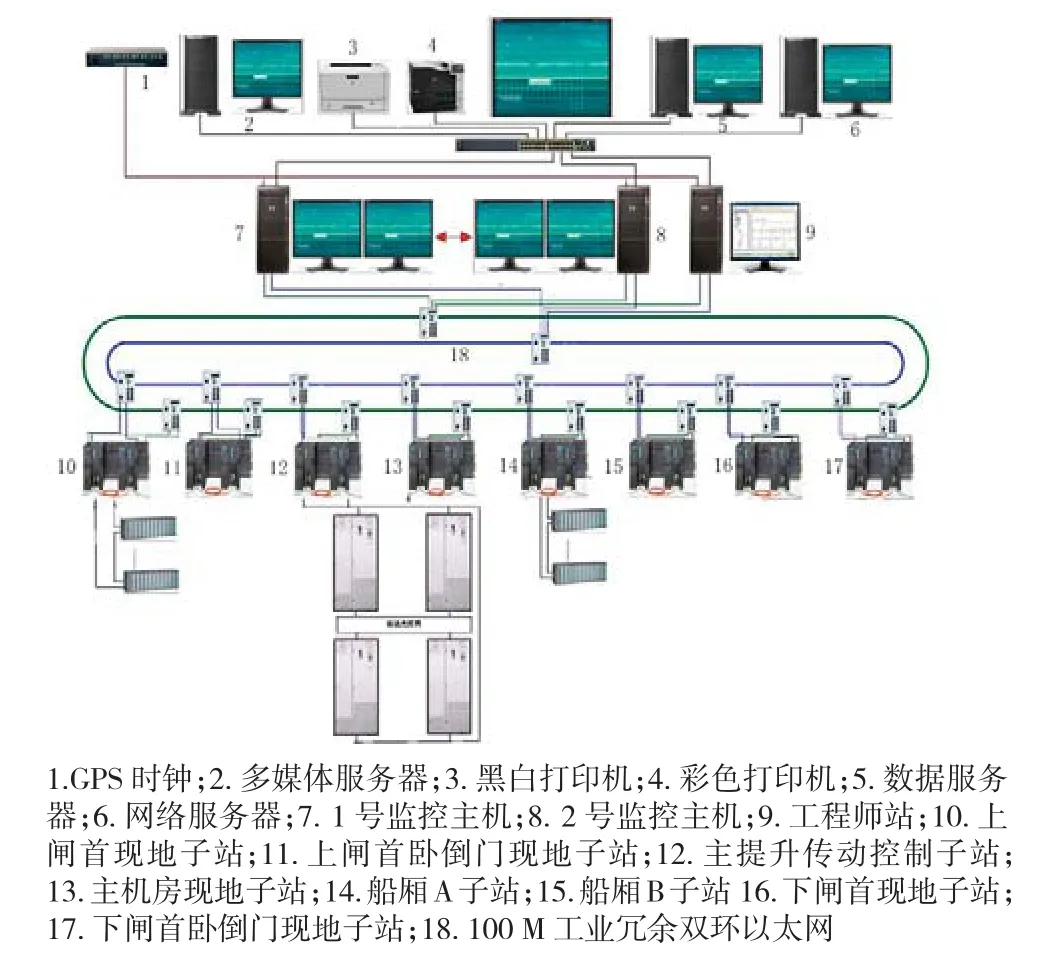
图1 思林升船机控制系统结构图
3.1 网络结构
主控级双操作员工作站、数据库服务器、工程师/培训工作站和多媒体服务器、网络服务器之间采用1000 Mb/s工业单以太网连接,组成主控级信息网络。
主控级网络通过可网管工业交换机与各个现地控制站之间的交换机形成100 Mb/s的双环工业以太网连接。各现地子站之间设置一条I/O硬连接通道,当工控网络故障时,通过I/O硬连接进行各现地子站之间必要的闭锁,实现网络故障状态下的应急操作运行。
3.2 主控级
正常情况下,双机热备为主控级监控主机采用的工作方式,其中1台用于工作,1台用于备用。当工作主机发生故障时,备用机可以升级为工作主机,实现双机无扰动的自由切换。
网络服务器主要承担主控级以太网通信管理。负责升船机数据库管理和对外通信。
多媒体系统中的工业电视和广播控制管理由多媒体工作站负责实现。
主控级集控软件的编制、设计及修改由工程师站负责实现,同时工程师站也负责下载各现地子站的程序。其他功能还包括网络运行情况的实时监控,工控网络监控软件的运行等。
主控级系统:
(1)主控级监控系统的主要功能是升船机实时动态运行屏幕显示、数据采集和处理、事件顺序记录、数据通信、事故处理以及恢复操作指导、软件开发及培训的功能、系统设备运行维护管理等功能。
(2)主控级监控系统的特点是准确、迅速、有效。可以完成对升船机被控对象的实时流程控制和实时安全监视以及分支机构的调试控制。
(3)主控级控制系统是升船机完成实时控制和监测的中心。其具体职责包括升船机的流程控制、实时监视、通航指挥及单机调试,多媒体管理等功能。
3.3 现地控制级
根据工艺特点,建筑物的布置和现场控制的分布情况,现场设置8个现地控制站,控制站均配置冗余的SIEMENS控制器及其远程I/O子站。
3.3.1 现地控制系统功能
(1)现地子站控制级的主要功能包括集中分步流程的控制、升船机各机械设备集中自动流程控制、现地手动调试、实时数据处理、集中单机构调试、故障报警及应对处理、现场网络通信以及人机对话等功能。可以完成与上述信息的处理和上传。
(2)各现地控制子站的主要功能有:控制对象状态的现地实时指示灯显示和数字显示、对现地传感器的数据采集和处理、专业键盘及按钮开关操作、事件顺序记录、故障确认及恢复操作、通航信号灯的控制、事故报警及应对处理、现地网络的数据通信、现地设备的状态诊断和系统状态的自诊断等功能。
(3)各现地级控制子站的特点是准确、迅速、有效。包括完成对升船机被控对象的实时流程的控制、实时监视以及现地单机构动作控制等功能。
(4)当各现地控制子站需要对现场传感器的数据进行采集和处理时,通过现地站的各模拟量数据传感器采集并上传监控系统,系统将对模拟量是否合理有效进行判断,以及完成标度变换与工程系数修订。系统还将对数字量进行防抖动处理,将抗干扰滤波应用于数据处理,同时也进行合理有效性的判断。
3.3.2 各现地子站功能分配
(1)上闸首子站主要功能
上闸首子站和下闸首子站功能相似,以上闸首子站为例说明。
1)上闸首工作大门启闭机控制。
2)上闸首工作大门锁定装置控制。
3)上闸首工作大门位置检测。
4)上闸首工作大门开度检测。
5)上闸首工作大门锁定装置位置检测。
6)上游水位测量。
7)上闸首通航渠道水位测量。
8)上游闸首通航信号灯控制。
9)上游闸首船舶探测。
10)网络通信。
(2)上闸首卧倒小门子站主要功能
上闸首卧倒小门子站和下闸首卧倒小门子站功能相似,以上闸首卧倒小门子站为例说明。
1)卧倒小门启闭机控制。
2)卧倒小门锁定装置控制。
3)卧倒小门支承机构控制。
4)卧倒小门开度检测。
5)卧倒小门位置检测。
6)卧倒小门锁定装置位置检测。
7)卧倒小门支承机构位置检测。
8)网络通信。
(3)主提升子站主要功能
1)制动器松闸/上闸逻辑控制。
2)制动器液压泵站控制。
3)润滑油泵启、停控制。
4)主提升电机风冷电机。
5)船厢上下行准确停位控制。
6)船厢行程检测。
7)船厢行程偏差及找点停位检测。
8)船厢运行速度与位置检测。
9)船厢上、下极限位置检测。
10)平衡重锁定装置位置检测。
11)船厢上、下锁定装置位置检测。
12)工作制动器松闸/上闸到位状态及闸皮磨损检测。
13)安全制动器松闸到位状态及闸皮磨损检测。
14)安全制动器泵站压力、油位、油温、滤堵等检测。
15)润滑站压力、油位、油温、滤堵等检测。
16)无线通信。
17)网络通信。
(4)承船厢A(B)泵站子站主要功能
承船厢的A泵站子站与承船厢的B泵站子站功能存在一定的相似性,以承船厢A泵站子站为例说明。
1)A泵站及液压阀组控制。
2)船厢上游端密封框、顶紧机构、对接锁定机构控制。
3)船厢上游端充、泄水装置控制。
4)船厢上游侧防撞梁控制。
5)船厢门控制。
6)船厢门锁定装置控制。
7)船厢静态调平控制。
8)通航信号灯控制。
9)防撞梁位置及行程检测。
10)顶紧位置检测。
11)对接锁定位置检测。
12)密封框位置及压力检测。
13)船厢门位置检测。
14)船厢门开度检测。
15)船厢门锁定装置位置检测。
16)船厢上、下游减速及停车位置检测。
17)船厢静态调平检测。
18)船厢动态水平检测。
19)船厢上游端厢头间隙水深检测。
20)船厢水深及水平检测。
21)钢丝绳均衡油缸行程检测。
22)钢丝绳张力检测。
23)船舶探测。
24)网络通信。
25)无线通信。
(5)主提升传动控制子站主要功能
1)主提升电机交流变频传动装置控制、保护。
2)共用一个速度环控制进行多电机传动。
3)多电机出力均衡控制。
4)动态预加力矩控制。
5)速度曲线运行控制。
6)上下行准确停位控制。
7)主提升电机交流变频传动装置开关量、模拟量等状态信号的采集。
8)同步轴扭矩测量。
9)船厢行程、运行速度、加速度检测。
10)网络通信。
4 工业电视监控系统设计
升船机设有工业电视系统。在集控室中设有矩阵控制器、硬盘录像机、监视器等,通过在升船机建筑内各层布置摄像机,对整个升船机的设备运行情况及整体运行过程和各控制站点包括各个重要分机构的工作情况进行监视,如图2所示。
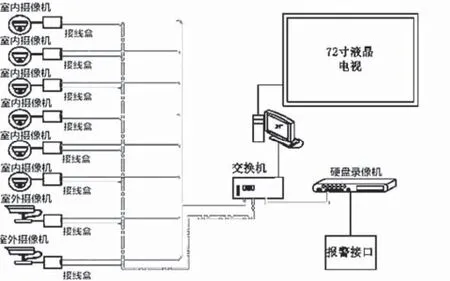
图2 工业电视监控系统
通过工业电视系统对升船机各机房控制设备进行全面监视。工业电视监控系统的布局合理、配置灵活,软件具备更新功能、可满足长时间运行。
5 广播与通航指挥系统设计
升船机的广播系统采用自动、人工两种播音方式。自动方式下根据升船机计算机监控系统指令播放多媒体服务器的语音信号,并具有广播监听等功能。
广播与通航指挥系统功能:
(1)手动控制播音功能。采用话筒直接播音或播放录制好的录音,实现广播指挥。
(2)应急广播功能。应急广播功能包括消防紧急广播、通航事故紧急广播。无论广播系统处于自动还是手动播音状态,紧急广播均能以最高优先级别进行广播。
(3)监听功能。设置能检查各类待播的语音信号(或声音文件)和监听正在播出的广播语音的监听系统。
6 检测系统
在升船机各部分装有检测装置,检测装置由检测元件和处理电路、信号变换、远距离信号的传输系统和模拟/数字显示装置所构成,其中加入了冗余以及容错的设计,因此检测装置对电控系统的作用并非只是单一检测装置对系统作用的简单代数和,而是在此基础上进一步改善系统的性能和提高系统的可靠性。
(1)检测项目和数量的配置,可以满足控制系统对检测设备的总体技术原则的要求,并能有效地满足升船机的安全性、可靠性。可以实现高效准确地运行以及对重要设备进行监护检测的需要。
(2)检测项目和数量的配置满足升船机控制系统对整个升船机系统设备自检的需要。
(3)对检测装置的输出信号进行调理和规范处理使其满足PLC控制单元和二次显示仪表的输入需要。
7 结语
乌江思林水电站是贵州区域的乌江干流水电开发进程的重要里程碑,也是乌江流域的第8个梯级电站。乌江思林水电站升船机上游及下游还有沙陀水电站升船机以及构皮滩水电站三级升船机,这3个水电站的升船机构成了乌江流域的重要通航设施。升船机采用的分布式控制系统设计安全、可靠、技术先进,为今后乌江上游升船机控制系统设计提供了借鉴作用。
