基于协同神经网络的智能车行驶路径记忆算法优化
2019-09-23童友波
童友波
(合肥职业技术学院 信息工程与传媒学院,安徽 合肥 238000)
0 引言
目前,路径记忆算法被广泛应用于各大领域,尤其是移动机器人与人工智能领域,例如智能车、智能机器人等。随着智能车的兴起以及我国越来越复杂的交通情况,对路径记忆算法的需求也在逐渐的提升,对路径记忆算法相关的指标要求也在不断的增长,如何对路径记忆算法进行优化是现今研究的重点问题之一[1]。
协同神经网络是在20世纪80年代末期由Haken教授提出的,主要是将协同学与神经网络进行了有效的结合,形成了新的概念——协同神经网络。协同神经网络运行过程主要包括两个阶段,第一阶段为网络的学习训练阶段,第二阶段为网络的识别阶段[2]。协同神经网络与传统神经网络相比具备更多的功能与优势,例如协同神经网络模式训练时间短,网络学习速度快,网络结构复杂程度低,联想效果好,无伪状态等。因此,将其引入到路径记忆算法中,可以对路径记忆算法进行极大的优化。
传统智能车行驶路径记忆算法由于路径信息计算量大、计算过程复杂,导致算法的效率较低,从而使智能车的行驶速度降低,为此提出基于协同神经网络的智能车行驶路径记忆算法优化研究[3]。通过优化智能车行驶路径记忆算法,提高算法的效率,使智能车达到稳定、较快行驶速度的控制目的。设计仿真实验对优化的智能车行驶路径记忆算法性能进行验证,主要是将传统智能车行驶路径记忆算法与优化的智能车行驶路径记忆算法应用到智能车竞速导航中。结果表明,相同距离导航时间较少的优化智能车行驶路径算法具备更好的性能[4]。
1 优化智能车行驶路径记忆算法
智能行驶路径记忆算法主要是对智能车行驶路径的长度与转角值进行记忆,通过路径记忆对智能车的行驶路径与速度等进行控制。传统智能车行驶路径记忆算法最大的问题就是效率低,因此主要是对智能行驶路径记忆算法的效率进行优化。通过简化算法的计算过程、减小路径信息可存储空间、增强响应的实时性等对算法的效率进行提升[5]。优化智能行驶路径记忆算法如下所示。
1.1 智能车行驶路径图像边缘信息获取
采用传感器对智能车行驶图像信息进行采集,通过图像特征提取与图像处理得到路径边缘信息,为下述智能车行驶路径信息的获取提供准备。具体的准备过程如下所示。

表1 下位机图像信息发送流程表Table 1 Under a machine image information flow table
传统智能行驶路径记忆算法主要是采用摄像头对智能车行驶图像信息进行采集,由于传输信息量过大导致响应速度过慢。而优化智能行驶路径记忆算法主要采用传感器对图像信息进行采集,只需要对图像的边缘信息进行提取,通过边缘信息就可以得到响应的智能车行驶路径信息。
选中传感器界面上的接收边缘线选项,同时对传感器中的上位机与下位机的图像大小进行相应的设置。由于上位机需要在接收到边缘线后对其进行还原,因此,将上位机与下位机的图像大小设置为相同。若是设置为不同,上位机还原得到的边缘线位置就会发生改变。
传感器中下位机采集的图像大小为130像素×50像素,采用ImageData二维数组对图像进行存储,SendByte()为发送函数[6]。采用发送函数将下位机采集的图像信息传输给上位机。下位机图像信息发送流程如表1所示。
设置上位机的图像大小为130像素×50像素,对下位机发送的图像信息进行接收,采用拟合方法对图像边缘信息进行提取。首先将图像的方向图与梯度图采用拟合方法进行拟合,以梯度图导数的最大值作为图像边缘信息的临界值[7]。图像梯度向量求取过程为:首先对图像进行灰度描述,具体表示为
f(x,y)=ax+by+c
(1)
其中,f(x,y)表示的是图像信息;a,b,c分别表示的是需要设置的变换函数。
设置原点为图像的中心,采用下述公式可以对a,b值进行求取,公式为

(2)
则图像梯度的大小与角度分别为

(3)
根据公式(3)可以得到图像的方向图与梯度图,对其进行拟合,设定灰度阈值,采用图像二值化方法对其进行逐层处理,得到图像边缘信息[8]。为下述智能车行驶路径信息的获取提供信息支撑。
1.2 智能车行驶路径信息计算
以得到的图像边缘信息为基础,采用曲率计算公式对智能车行驶路径的曲率与转角信息进行计算,从而得到智能车行驶路径完整信息,为下述智能车行驶路径信息的记忆做准备[9]。
转角信息求解过程为:根据图像边缘信息得到路径中线图像,将路径中线的中点设置为A,路径的端点设置为B和C,则A,B,C可以形成一个三角形,则三角形面积为

(4)
其中,|AB|与|AC|表示的是边AB与AC的长度。若是三角形是以顺时针的方向分布的,其面积为负,反之则为正。根据三角形面积的符号对智能车进行左、右转向的控制[10]。
智能车行驶路径的曲率指的是三角形的外接圆半径,其计算公式为
(5)
根据得到的曲率信息对智能车行驶路径的转角信息进行计算。首先对阈值进行设定,将路径信息的有效值作为控制值,将控制值的最小值与阈值进行比较。若是控制值大于阈值,则认为当前的控制值最小值即为转向偏差。若是控制值小于阈值,则认为阈值为转向偏差。则转角为
(6)
通过上述过程的计算,得到了智能车行驶路径的曲率与转角信息,也就是说得到了智能车行驶路径的完整信息,为下述智能车行驶路径信息记忆的实现做准备。
1.3 实现智能车行驶路径信息记忆
以上述得到的智能车行驶路径信息为基础,采用协同神经网络对其进行记忆,为智能车导航系统提供支撑,保障智能车稳定、高速的行驶[11]。
采用协同神经网络对智能车行驶路径进行记忆,主要采用的是路径分段形式,这样的分段路径记忆方式,不仅提高了智能车运行速度,而且保证智能车稳定运行[12]。协同神经网络记忆过程如图1所示。

图1 协同神经网络记忆过程图Fig.1 Collaborative neural metwork memory process diagram
协同神经网络具有自学习能力,可以对输入的信息进行自动分类建立相应的学习矩阵,并对识别出的信息进行反馈学习,以此来对智能车行驶路径进行记忆。同时该方法还具备一定的适应能力,主要表现在优化重构序参量的过程中,使其识别能力更强、更精准,另外该网络可以减少迭代的次数,提高路径信息的识别速度,从而提升智能车行驶路径记忆的效率[13]。
为了满足智能车行驶路径信息的记忆,采用协同分类器对输入的智能车行驶路径信息格式进行转换,使其格式为标准格式,以信息属性为标准对其进行分类形成相应的学习矩阵,然后对其进行反馈自学习[14]。则智能车行驶路径记忆步骤如下所示:
步骤一:以上述得到的智能车行驶路径信息为基础,采用协同分类器对其格式进行转换,得到标准格式的路径信息为
X(i)=(x1,x2,…,xn)
(7)
以属性为依据进行分类,分类结果为

(8)

步骤二:将学习矩阵进行原型聚合,并适当地对其进行修改;
步骤三:对上述原型聚合后的学习矩阵进行归一化预处理;
步骤四:采用相似度序参量重构法对初始序参量进行构造;
步骤五:采用网络识别模式,对上述序参量进行识别,从而实现智能车行驶路径的记忆[15]。
通过上述过程完成了对智能车行驶路径的记忆,为智能车导航系统提供数据信息的支撑,保障智能车的稳定行驶。
2 优化智能车行驶路径记忆算法效率分析
上述过程对智能车行驶路径记忆算法进行了优化,但对其优化效果还有待检验。智能车行驶路径记忆算法主要应用于智能车的导航系统,导航系统可以通过该算法对智能车进行相应的控制。因此,将传统智能车行驶路径记忆算法与优化智能车行驶路径记忆算法引入到导航系统中,并保持导航系统其它部件完全一致进行实验。
在实验过程中,将两辆采用不同智能车行驶路径记忆算法的智能车放置于同一赛道进行比赛。为了方便路径记忆,将赛道分成直道A,S型弯道B,左转弯道C,右转弯道D,左弯道转至右弯道的过渡赛道E,右弯道转至左弯道的过渡赛道F,其他弯道G。赛道总计长度为500 km。采用两辆智能车进行比赛实验,哪辆智能车使用的时间少,则说明其采用的智能车行驶路径记忆算法效率高。
当智能车低速赛试跑时,两辆智能车使用时间对比图如图2所示。当智能车竞速赛跑时,两辆智能车使用时间对比图如图3所示。
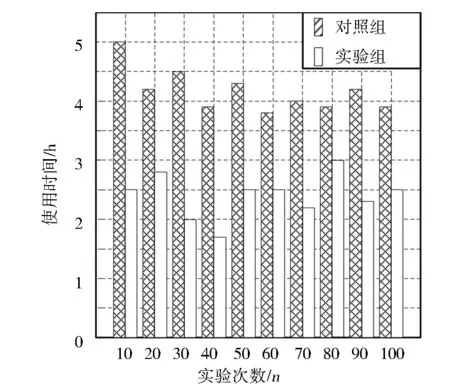
图2 低速试跑使用时间对比图Fig.2 Comparison of using time of low-speed test run
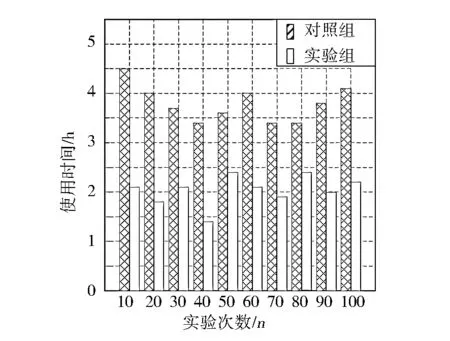
图3 竞速试跑使用时间对比图Fig.3 Racing try run time contrast figure
为了方便实验结论的描述,将上述采用传统智能车行驶路径记忆算法的智能车称为对照组,将采用优化智能车行驶路径记忆算法的智能车称为实验组。如图2所示,实验组的使用时间普遍低于对照组;经计算,智能车在低速试跑时,实验组使用时间的平均值比对照组少了1.8 h。如图3所示,实验组的使用时间普遍低于对照组;智能车在竞速赛跑时,实验组使用时间的平均值比对照组少了2.1 h。
由上述两个实验结果可知,采用优化智能车行驶路径记忆算法的智能车使用时间更少,充分说明优化智能车行驶路径记忆算法具备更高的效率。
3 结束语
优化的智能车行驶路径记忆算法极大地提升了算法的效率,为智能车安全、稳定行驶提供有力的保障。但是在实验过程中,由于忽略了干扰因素的影响导致实验结果产生少许的偏差,因此需要对智能车行驶路径记忆算法进行进一步的研究与探索。
