深海波导中基于采样简正波模态降维处理的广义似然比检测*
2019-09-21孔德智孙超李明杨卓颉刘雄厚3
孔德智 孙超 † 李明杨 卓颉 刘雄厚3)
1) (西北工业大学航海学院, 西安 710072)
2) (海洋声学信息感知工业和信息化部重点实验室, 西安 710072)
3) (中国科学院声学研究所, 声场声信息国家重点实验室, 北京 100190)
1 引 言
深海波导具有尺度范围大、干涉结构明显等特点, 声源激发的声场也呈现出明显的传播模式, 如影区、汇聚区、表面波导等[1].当接收阵列位于声源传播声场的非汇聚区或者远距离区域, 接收数据的信噪比将会显著下降, 这对水下声源检测[2]极为不利.此外, 相较于浅海波导的起伏多变, 深海环境相对稳定, 通常可以不考虑其环境参数的不确定性, 因此可采用多快拍数据处理以提高检测器的时间增益.目前关于深海波导的研究多集中在其声场的传播模式[1]及其远距离传播声场的空间相关特性[3]等领域, 而水下声源检测的工作还比较少见.
水下声源检测是水声信号处理的重要任务之一, 同时也为后续的定位、跟踪和识别等工作奠定基础.近年来, 将水声物理场的相关理论运用到水下声源检测中成为提高检测性能的主要途径之一,关于这部分的研究工作主要集中于浅海环境[4-10].基于水声传播理论构建信号检测模型, 确定海洋波导中的最优检测器为匹配模型检测器(matched model detector, MMD)[4-5], 它表征了这类检测器所能达到的检测性能上限.MMD将接收数据(通常在频域)与声传递函数做相关运算的结果作为检测统计量, 然而由于实际中波导环境不确定和声源位置未知, MMD通常无法实现[4-7].针对此问题主要有两类解决方法.一类是利用贝叶斯原理、蒙特卡罗方法等对MMD进行改进, 如贝叶斯检测器[4,5]、基于主成分分析的检测器[6]和基于蒙特卡罗优化的广义似然比检验[8-11]方法以规避声传递函数的使用, 该类方法根据声场传播的简正波模态构造信号子空间, 并将接收数据投影到信号子空间进而获得最终的检测统计量[8-10].由于避免了声源位置搜索, 这类方法具有较小的运算量和更好的稳健性[10].此外, 还有一些学者提出不确定海洋环境中的定位算法[12,13]也可以借鉴到检测中来, 但目前这部分工作尚未见诸相关文献.考虑到浅海环境的时变和空变性, 多是采用频率单快拍模型来设计检测器,对于多快拍的情况, 则是简单地将单快拍输出非相干叠加.这样操作虽然简便且运算量小, 但却未挖掘各快拍之间的相关信息以进一步提高检测器的检测性能.
基于上述讨论, 本文利用多快拍模型对深海波导中的窄带声源检测问题展开研究.待检测声源通常含有未知参数, 如声源级、声源距离和深度等,因而该问题可归纳为复合假设检验问题.复合假设检验主要有贝叶斯方法和广义似然比(generalized likelihood ratio, GLR)检验两类方法.贝叶斯方法通过对未知参数的积分获得最终的检测统计量, 它要求未知参数的先验知识.鉴于深海波导的大尺度范围特性, 使用贝叶斯方法时将面临庞大的运算量.而GLR方法估计未知参数以便用在似然比检验中, 实现起来容易且严格的假定较少, 尽管不是最优的, 但实际上它的性能很好, 在所有不变类检验中表现为一致最大势检验[14].因此, 本文采用GLR方法来设计深海波导中的水下声源检测器.多快拍下的GLR检测器大都是基于接收数据采样协方差矩阵(sample covariance matrix, SCM)的处理[15,16], 从物理角度来看, 这样处理的好处是可以利用多快拍信号之间的空间一致性(这里空间一致性是指各快拍位于相同的向量空间).SCM包含着声源信号和背景噪声信息, 其结构由接收数据的快拍数和空间维度这两个物理量决定.空间维度是指接收数据所处向量空间的维度, 如在阵元域,接收数据的空间维度等于阵元个数.因而GLR检测器的检测性能与快拍数和空间维度有关.快拍数为GLR检测器提供时间增益, 容易理解其与相应的检测性能成正相关.而空间维度通常决定了未知参数的个数, 降低空间维度时未知参数数量减少,这对GLR检验过程中的未知参数估计是有益的.因此, 降维处理常用于改善GLR类检测器的检测性能, 如文献[17,18]通过子阵处理降低接收数据的空间维度, 取得一定的性能提升效果.但目前的处理方式都是基于纯数据驱动, 没有利用声传播的相关物理特性, 改善效果有限.
根据简正波理论, 使用布放在波导中的阵列采样各阶简正波模态信息(驻波和行波)时, 采样模态信息只与波导环境有关, 而与声源级、声源距离和深度等未知参数无关, 并且声源信号位于由模态信息矩阵张成的空间(下简称模态空间).在深海环境中, 由于阵列孔径尺寸的限制, 采集的模态信息通常是非完备的, 这就造成即使阵元个数远小于传播模态数, 但在一定条件下“有效模态空间”的维度仍小于阵元个数[14], 也就是说, 声源信号事实上存在于更低维的空间.该情形下, 将阵元域接收数据映射到“有效模态空间”, 即可在几乎不损失信号能量的情况下, 实现对接收数据的降维处理.但“有效模态空间”的维度并不总小于阵元数, 而是与阵列配置和声源频率有关[19].
本文根据阵列接收的声场结构特性, 提出一种基于简正波模态采样信息降维处理的GLR (dimensionreduced GLR, DR-GLR)检测方法.该方法根据阵列接收声场信号位于更低维的“有效模态空间”这一物理现象, 针对常用的垂直线列阵(vertical linear array, VLA)和水平线列阵 (horizontal linear array, HLA), 分别根据其采样的驻波信息和行波信息中提取“有效模态空间”, 利用“有效模态空间”构造降维矩阵, 对GLR检测统计量中的SCM进行降维处理, 最终给出相应的DR-GLR检测统计量.这种降维处理在几乎不损失信号能量的情况下降低接收数据的空间维度, 实际上滤除了若干维度中的噪声分量进而提高了检测器的输出信噪比, 最终使DR-GLR检测器获得更优的检测性能.本文内容安排如下: 首先建立了窄带多快拍的信号检测模型; 然后推导了深海波导中噪声功率已知和未知情况下的GLR检测器, 并分析了接收数据的空间维度与快拍数对GLR检测器输出信噪比的影响; 接着分别利用VLA和HLA采样模态信息构造降维矩阵并给出其各自的检测统计量; 最后通过数值仿真验证了所提方法的性能改善效果, 讨论了阵列采样模态信息对DR-GLR检测器的影响.
2 声场与检测模型
假设一N元线列阵布放于深海波导中, 则在观测时刻t, 阵列接收信号可表示为

式中r(t) 为N×1 的时域快拍向量, 表示各阵元上的接收数据;g为声源到阵列的声传递函数向量,假定在观测时间内声源和阵列位置不变, 即g保持不变;s(t) 为声源辐射的窄带随机信号, 服从均值为零、方差为的复高斯分布;n(t) 为环境噪声快拍向量, 服从均值为零、协方差矩阵为为N×N的单位矩阵)的复高斯分布; 假设信号与噪声不相关.
假设观测时间内采样数据快拍数为L, 二元假设检验模型[12]可表示为:

式中零假设H0和备选假设H1分别表示声源信号不存在和存在.假设信号声场在空间上完全相关,则信号协方差矩阵可表示为上标H表示共轭转置运算.两种假设下接收数据分别服从如下分布,

式中CN表示复高斯分布,K0和K1分别表示零假设和备选假设下的RCM,记接收数据矩阵为R=[r(1),···,r(L)] , 则可得零假设和备选假设下的概率密度函数

式中 |·| 表示矩阵行列式, t r(·) 表示矩阵的迹运算.对(4)式取自然对数并利用矩阵求逆引理, 可得零假设和备选假设下的对数似然函数(Loglikelihood function, LLF)分别为:

式中 ∥ ·∥ 表示向量模值.进而对数似然比(Loglikelihood ratio, LLR)可表示为:

3 深海波导中的GLR检测器及其输出信噪比
对于深海波导中位置和声源级未知的窄带声源, 声传递函数和信号功率均为未知参数.此外存在噪声功率已知和未知两种情况.应用GLR方法推导相应的检测统计量时, 第一种情况下待估计未知参数为声传递函数和信号功率, 第二种情况下待估计未知参数为噪声功率、声传递函数和信号功率.在此基础上, 分析接收数据的空间维度和快拍数对GLR检测器输出信噪比的影响.
3.1 噪声功率已知
为获得相应的检测统计量, 须得到声传递函数和信号功率的最大似然估计.注意到信号功率为正标量, 可将其与声传递函数合并为一个量, 即令g′=σsg, 则备选假设下的LLF可写为

运用拉格朗日乘子法求解(8)式可得

式中λ为朗格朗日乘子.记的最大特征值为对应的特征向量为emax, 则由(9)式可得

将(10)式代入(6)式中并舍去常数项, 可得该情况下的GLR检测统计量为

该检测统计量为SCM的最大特征值与噪声功率之比, 因而将对应检测器称为特征值检测器(eigenvalue detector, EVD).
3.2 噪声功率未知

此外, 该情况下未知参数g′的最大似然估计同上.
将(12)式代入(6)式中并舍去常数项可得该情况下的GLR检测统计量为

该检测统计量为SCM的最大特征值与其迹之比.同时也注意到, 该检测统计量不依赖于真实的噪声功率, 因而其检测门限也与真实噪声功率无关, 故该检测器为恒虚警率(constant false alarm rate,CFAR)的特征值检测器, 简记为CEVD.
上述EVD和CEVD都是运用GLR方法推导得到的, 将其统称为GLR检测器, 二者具有类似的形式, 其检测统计量都可看作是SCM的最大特征值与噪声功率之比.区别在于EVD直接利用真实噪声功率信息 () , 而CEVD是从接收数据中估计噪声功率(见(12)式).当噪声真实功率确定且已知时, 对于CEVD, 由于噪声功率估计误差的存在, 可以预见其检测性能相较于EVD会有所下降, 但随着数据快拍数增多估计误差减小, 性能下降程度也将减弱.这种性能牺牲是有意义的, 它带来的是CEVD的恒虚警特性, 即在噪声功率不确定的情况下依然能实现稳健的检测性能.
3.3 GLR检测器的输出信噪比
使用检测器的输出信噪比定量描述其检测性能, 显然输出信噪比越大检测器的检测性能越好.为计算输出信噪比, 引入检测器的偏移系数(deflection coefficient, DC)[20], 其定义为

式中E[·] 表示求期望运算,D[·] 表示求方差运算,T表示相应的检测统计量.DC渐近表征了检测器的输出信噪比, 下面以EVD为例, 讨论接收数据的空间维度和快拍数对GLR检测器的影响.
零假设下, EVD的检测统计量渐近(L>N)服从2阶Tracy-Widom分布[21]:

备选假设下, EVD的检测统计量渐近 (L≫1) 服从高斯分布[22], 其均值为

式中,µTW2和σTW2都是L,N的函数, 因此给定信噪比下, EVD的输出信噪比只与接收数据的快拍数和空间维度有关.图1给出了相同信噪比下,EVD的输出信噪比随快拍数和空间维度的变化曲线.可以看出, 相同信噪比下, EVD的输出信噪比随快拍数的增多而增大, 随空间维度的增大而减小.
从统计检测的原理来看, 当快拍数增多时,EVD获得更大的时间增益, 相应地其输出信噪比增大; 而当空间维度减小时, 意味着未知参数的个数减少, 这使得GLR过程中的估计精度提高,EVD获得更优的检测性能, 同时表现为更大的输出信噪比.从物理角度来看, 由于背景噪声在空间各维度均匀分布, 当信号能量一定时, 空间维度越低意味着引入检测器的噪声分量就越少, 因而检测器能获得更高的输出信噪比.CEVD具有与EVD类似的检测统计量, 同理可得空间维度对其检测性能具有同样规律的影响, 这里不再赘述.上述结果表明, 对于GLR检测器, 相同能量的阵列接收信号位于更低维的空间时, 更有利于噪声背景下的信号检测.

图1 EVD的输出信噪比随接收数据快拍数和空间维度的变化曲线, s nr=1 (a) 固定空间维度 N=20 ; (b) 固定快拍数L=100Fig.1.The output SNR of EVD varying with various snapshot number and spatial dimension, s nr=1 : (a) spatial dimension N=20 ; (b) snapshot number L=100.
4 基于简正波模态采样信息的降维处理
本节从深海波导中声传播的物理特性出发, 并结合阵列(VLA和HLA)接收的声场结构, 提出一种基于简正波模态信息降维处理的GLR (dimensionreduced GLR, DR-GLR)检测方法.
根据声场简正波理论, 对于远距离传播的声场, 只有有限阶简正波模态在波导中传播.深海波导中一定频率的窄带声源到接收点 (r,z) 处的声压传递函数可表示为各阶简正波之和的形式,

式中z,r分别为接收点深度和水平距离,zs为声源深度,M为波导中传播的简正波阶数,ϕ(·) ,kr,m和δm分别为第m阶简正波的模态函数、水平波数和衰减系数.由(19)式可知, 每阶简正波声场由沿垂直分布的驻波和沿水平方向传播的行波构成.当使用VLA或HLA接收采样简正波声场时, VLA采样到各阶驻波信息, HLA采样到各阶行波信息.降维处理的关键在于构造降维矩阵, 由于VLA和HLA接收声场结构的差异性, 利用简正波模态采样信息构造降维矩阵的过程也有所不同.下面分别根据VLA和HLA各自接收声场特性构造降维矩阵, 对接收数据进行降维处理, 并给出相应的DRGLR检测统计量.
4.1 基于VLA采样简正波模态的降维处理
当接收阵为VLA时, 由(19)式, 声场传递函数可表示为模态函数采样矩阵(下简称模态矩阵)与模态系数向量乘积的形式,
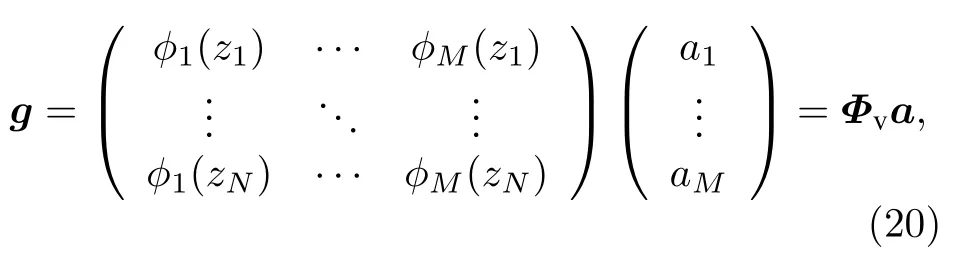
式中z1,···,zN分别为VLA各阵元的深度, 模态系数各阶模态函数体现了驻波的特性, 沿垂直方向分布并覆盖整个波导深度, 且满足如下正交性:

式中H为波导深度, Δ(·) 为狄拉克函数.由(20)式可知, 声场位于模态矩阵张成的空间, 即span(g)∈span(Φv), 模态矩阵张成空间的维度决定了声场的维度, 模态矩阵仅与声源频率和波导环境有关, 而与声源位置无关.
在深海波导中, 通常VLA孔径远小于波导深度, 导致阵列对模态信息采样的完备程度很低, 各阶模态之间不再满足正交性并存在一定的相关性,导致模态矩阵包含部分冗余信息.造成的结果是,尽管阵元个数通常也小于声源激发的模态阶数, 但事实上模态矩阵“有效模态空间”的维度在一定情况(声源频率和阵列配置)下仍小于接收数据的空间维度(即阵元个数).为获得“有效模态空间”, 对模态矩阵进行奇异值分解(singular value decomposition, SVD)
式中Uv=[uv,1,···,uv,N] 为N×N的列正交矩阵,Sv=diag(ξv,1,···,ξv,N)为奇异值矩阵(奇异值按降序排列),Vv=[vv,1,···,vv,N] 为M×N的列正交矩阵.由(22)式可知, 模态矩阵可表示为N个秩一矩阵的加权之和, 加权系数为对应的奇异值.相应地, 模态空间被分解为由这些秩一矩阵张成的N个相互正交的子空间, 每个子空间包含一定的模态信息, 而奇异值则表征了各子空间模态信息的权重.当模态矩阵包含部分冗余信息时, 则存在一部分极小奇异值, 这些极小奇异值对应的子空间即为冗余子空间, 除此之外的子空间即为有效模态空间.有效模态空间包含了几乎所有的模态信息, 且信号能量全部位于有效模态空间,
对于模态矩阵来说, 冗余子空间是不必要存在的, 因为它们不仅对模态矩阵所包含的信息几乎没有贡献, 还占据一定维度的空间.摒弃冗余子空间,保留的有效模态空间包含的模态信息为有效模态信息.利用有效模态信息重构模态矩阵可得


式中对各阶奇异值做了归一化,ξ0为极小奇异值的门限值.ξ0若取值较大, 则会损失一部分模态信息;若取值较小, 则会留存冗余子空间.本文取经验值ξ0=0.01.由(23)式可知, 重构的模态空间仅由M0个子空间构成, 模态矩阵的维度也由N减小为M0.将其代入(20)式中, 则声传递函数可表示为


式中R′为降维后的接收数据,为降维后的SCM.容易发现, SCM的维度由N减小为M0.

对于CEVD, 其检测统计量中的分子和分母都包含对SCM的运算, 那么就存在两种降维方式, 只对分子降维和同时对分子分母降维.由于噪声均匀分布在各子空间, 若对分母部分也做降维处理, 那么就会滤除部分噪声分量, 这对噪声功率估计显然是不利的.因此我们只对CEVD检测统计量的分子降维, 相应的检测统计量为

将相应的检测器记为DR-CEVD.我们给出了DRGLR检测的算法实现流程图, 如图2所示.经过降维处理, 接收数据的空间维度由N减小为M0, 且信号能量几乎没有损失, 即信噪比几乎保持不变,因此DR-GLR检测器将获得更好的检测性能.
4.2 基于HLA采样简正波模态信息的降维处理
当接收阵为HLA时, 声源相对于HLA的位置参数除了深度和水平距离,还有水平方位角.这里假设声源相对于HLA的水平方位角为θ(如图3所示),以第一个阵元为参考阵元,利用(19)式,声传递函数可写为模态矩阵与模态系数相乘的形式
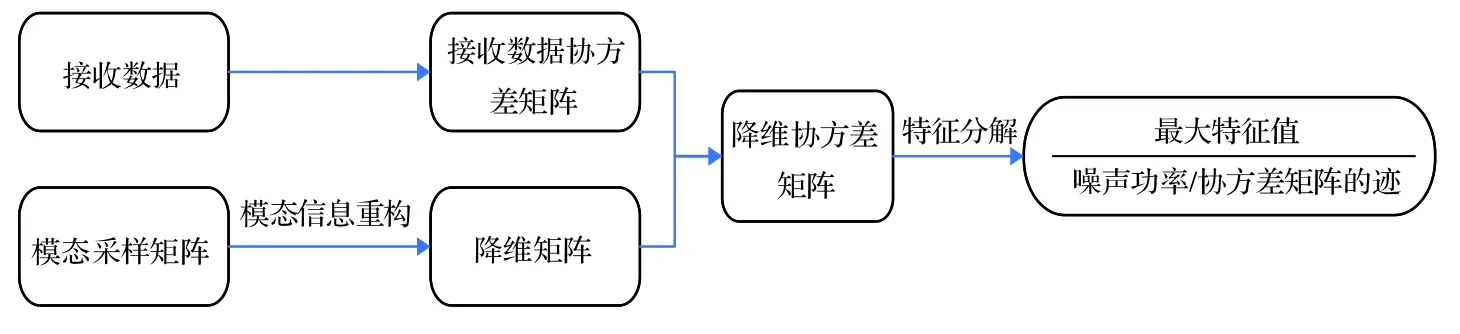
图2 使用VLA时DR-GLR检测器的算法流程图Fig.2.The flow diagrams of the DR-GLR detectors when using a VLA.

式中z为HLA布放深度,r1为声源与一号阵元的水平距离,rn=r1+(n-1)d为阵元的水平距离坐标.由(29)式可知,与VLA的情况类似,声场同样位于模态矩阵Φh张成的空间(〈Φh〉).不难发现,模态矩阵的列向量是以方位角θ入射的不同波数平面波的方向矢量.因此与VLA不同,HLA采样的是水平波数和方位角信息,而非模态函数信息.但为便于作类比理解,也称其为模态矩阵.

图3 水平阵声源信号入射方位Fig.3.The arrival angle of acoustic signal on the HLA.
水平波数是声源激发简正波行波的特征参数,随阶数增大而减小,但变化十分缓慢,邻近水平波数之间的差别很小,导致各阶模态(方向矢量)之间的强相关,最终造成模态采样信息的冗余性.同理可对接收数据进行降维处理.由于HLA的模态矩阵是θ的函数,运用SVD方法获得的降维矩阵也与θ有关,记为方位角θ通常未知,为获得最终的DR-GLRT检测统计量,需要在可能的方位角范围内进行扫描,当扫描到声源真实方位角时,信号声场全部位于“有效模态空间”,降维过程中没有信号能量损失,检测统计量的值达到最大,因此可得DR-EVD的检测统计量为

以及DR-CEVD的检测统计量为

相应的算法流程图如图4所示.
4.3 降维程度和降维系数
对于VLA和HLA,利用其各自采集的驻波信息和行波信息构造降维矩阵,实现了DR-GLR检测.由于模态矩阵采样信息的差异,最终得到的检测统计量表达式稍有不同(后者需要在方位角上进行扫描),但实质上它们都利用了阵列接收简正波声场信息的冗余性.对于VLA,冗余性是由阵列孔径远小于波导垂直尺度造成的; 而对于HLA,各阶水平波数的密集分布导致了模态采样信息的冗余性,最终导致有效模态空间维度小于接收数据的空间维度.
显然,有效模态空间维度越小,能对接收数据降维的程度就越大,DR-GLR检测器也就可以获得更大的输出信噪比,检测性能提升.有效模态空间的维度与阵列采样的简正波声场信息有关,因此,对于不同的声源频率和阵列配置,降维程度也存在差异.对给定阵元数的阵列,定义降维系数

来定量描述降维程度,其值越大,表明降维程度越大,相应地,DR-GLR检测器能获得相较于GLR检测器更大的检测性能提升.显然,降维系数与有效模态空间维度(M0)呈负相关.从物理角度来看,M0表征了阵列采样简正波模态信息的“丰富程度”,而简正波模态数增多(如当声源频率增大)和阵列孔径增大(如当阵元间距增大)都会加强这种“丰富程度”,带来的结果就是M0增大、η减小.因此降维程度依赖于声源频率和阵列孔径.当有效模态空间维度增大到与接收数据的空间维度(即阵元数)相等时,η减小为零,DR-GLR将不再具有降维效果.
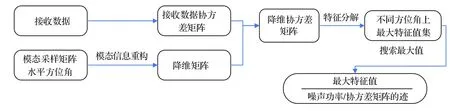
图4 使用HLA时DR-GLR检测器的算法流程图Fig.4.The flow diagrams of the DR-GLR detectors when using a HLA.
5 数值仿真与分析
本节通过数值仿真,首先给出GLR检测器,即EVD和CEVD的检测性能分析与对比,以及接收数据的空间维度对其检测性能的影响,然后验证经过降维处理后的DR-GLR检测器的性能提升效果,并结合声场传播与接收特性,探讨引起检测器性能变化的内在物理机理.仿真使用的深海波导模型及相关环境参数如图5所示,其中声速剖面为Munk曲线,如图6所示.考虑与距离无关的波导环境,假设声源深度为200 m.仿真中声场及简正波模态由KRAKEN程序计算,仿真图中标注的信噪比为对数信噪比,即dB.

图5 深海波导及相关环境参数Fig.5.Deep-sea waveguide and environmental parameters.
5.1 EVD和CEVD的检测性能分析
分别考察噪声功率已知和未知时EVD和CEVD的检测性能表现情况.假设窄带声源中心频率为150 Hz,阵元数为30,阵元间距为半波长(5 m),虚警概率PFA=0.01.检测门限和检测概率利用蒙特卡罗实验计算,计算每一个检测概率的实验次数为100000.本文讨论的检测性能通过给定虚警概率和信噪比下的检测概率来考量,暂不考虑阵列配置(如阵型、布放深度、阵元间距等)对信噪比的影响,给定信噪比情况下,EVD和CEVD的检测性能与阵列配置无关,因而暂且对阵列配置不作要求.

图6 深海声速剖面Fig.6.Deep-sea sound speed profile.
图7给出了快拍数L=20 和L=40 时,EVD和CEVD的检测概率随信噪比的变化曲线.由图5可知,检测性能随快拍个数的增加而提高,相同快拍数下EVD的检测性能优于CEVD.这是因为CEVD没有直接利用真实噪声功率,而是从接收数据中估计噪声功率.由于接收数据快拍数的限制,CEVD估计得到的噪声功率与真实噪声功率有偏差,进而造成其检测性能差于EVD.但随着快拍数的增多,CEVD从接收数据中获得的噪声功率估计的精确性提高,相应地其检测性能与EVD的差距缩小,如图7(b)所示.
当噪声功率未知时,使用EVD时需要通过预先采集的噪声训练样本来估计噪声功率.然而由于真实环境的非平稳性和噪声样本数量的限制,估计的噪声功率通常与其真实值存在一定的偏差.因此在使用EVD时,就会产生噪声功率不确定性的问题[15,16].使用噪声不确定因子[21](noise uncertainty factor,NUF)描述噪声功率不确定性,其定义为

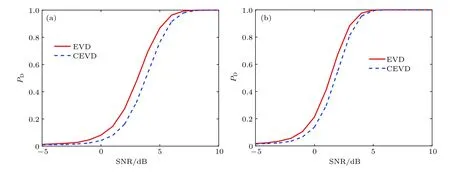
图7 不同信噪比下检测概率曲线比较,PFA=0.01 (a) L=20 ; (b)L=40Fig.7.Probability of detection curves with various SNRs,PFA=0.01: (a) L=20 ; (b) L=40.
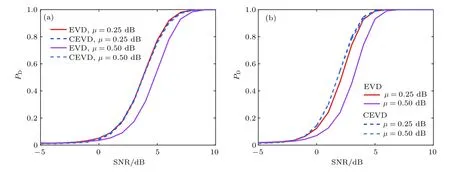
图8 噪声功率不确定,不同信噪比下检测概率曲线比较 (a) L=20 ; (b)L=40Fig.8.Probability of detection curves with various SNRs when noise power is uncertain: (a) L=20 ; (b) L=40.
图8给出了快拍数为L=20 和L=40 时,噪声功率不确定度为µ=0.25 dB和µ=0.5 dB时GLR检测器的检测概率曲线.由图8可知,当存在噪声功率不确定性时,EVD的检测性能下降,且随着噪声功率不确定度的增大,EVD的检测性能持续下降以致差于CEVD,如µ=0.5 dB时,EVD的检测概率已经明显低于CEVD; 而CEVD的检测性能始终保持不变,不受噪声功率不确定性的影响,这也验证了CEVD作为CFAR检测器的性质.同时对比图8(a)和图8(b)可以看出,噪声功率不确定情况下快拍数增加时CEVD的检测性能提升得更快.
考虑接收数据的空间维度对GLR检测器的检测性能的影响,给出了不同阵元数下检测概率随信噪比变化的曲线,如图9所示.由图9可知,随着阵元数增多,接收数据的空间维度增大,EVD和CEVD的检测概率都明显下降,这与前文中EVD的输出信噪比随数据维度增大而减小的情况相一致,同时也验证了通过降维处理改善GLR检测器检测性能的可行性.图9中的对比结果是在相同信噪比情况下获得的,并不是说缩减阵元个数可以提高GLR检测器的检测概率.若缩减阵元数使信噪比明显下降,则有可能导致检测概率下降.
5.2 降维处理对GLR检测器的性能提升
分别考虑使用VLA和HLA时DR-GLR检测器的检测性能.设置VLA初始深度为100 m(最靠近海面的阵元深度),水平距离为30 km; HLA深度为100 m,声源距HLA一号阵元的水平距离为30 km,水平方位角θ=10°; 其他参数同上.该频率声源总共激发了490阶简正波,使用VLA和HLA采集的各阶模态信息和模态矩阵归一化的奇异值分布如图10所示.由图10(a)和图10(c)可知,VLA和HLA采集到迥然不同的模态信息,分别是驻波信息和行波信息,且各阶模态信息形成了明显的干涉条纹,表明各阶模态之间存在相关性,以及模态采样矩阵包含冗余信息.由图10(b)和图10(d)可知,模态矩阵存在一部分极小奇异值,这部分极小奇异值对应了冗余模态信息张成的空间,利用(24)式计算可得VLA和HLA降维矩阵的维度M0分别为18和5.因此可以发现,HLA采样模态信息具有更强的冗余性,有效模态空间维度更小.这意味着对于相同孔径的阵列,由于HLA采样的行波信息之间具有更强的相关性,其接收信号声场事实上位于更低维的有效模态空间,

图9 不同数据维度下的检测概率曲线对比,快拍数 L=40 (a) EVD; (b) CEVDFig.9.Probability of detection curves with various spatial dimension: (a) EVD; (b) CEVD.

图10 阵列采样模态信息及相应模态矩阵的奇异值 (a) VLA采样的各阶模态; (b) VLA; 归一化的各阶奇异值分布;(c) HLA采样的各阶模态; (d) HLA,归一化的各阶奇异值分布Fig.10.Modal information sampled on the array and singular values of corresponding mode matrices: (a) Various modes sampled on the VLA; (b) normalized singular values associated with the VLA; (c) various modes sampled on the HLA; (d) normalized singular values associated with the HLA.
图11给出了噪声功率已知情况下,使用VLA和HLA时DR-GLR检测器的检测概率曲线,快拍数L=20.为便于对比,图中也给出了GLR检测器的检测概率曲线.记检测概率达到0.5所需的信噪比为检测器的信噪比门限.对于VLA,DR-EVD和DR-CEVD的信噪比门限相较于EVD和CEVD分别降低了0.9 和1.3 dB; 对于HLA,相较于EVD和CEVD,DR-EVD和DR-CEVD的信噪比门限分别有2.1 和2.6 dB的下降.由于利用采样简正波模态信息对接收数据进行了降维处理,使得GLR检测在更低维的空间进行,因而GLR检测器的检测性能获得明显的提高.HLA采样的行波信息冗余性更强,有效模态空间维度更小,因此该条件下使用HLA时DR-GLR获得更好的检测性能改善效果.
图12给出了噪声功率不确定情况下使用VLA和HLA时DR-GLR检测器的检测性能表现.与未降维的结果一致,DR-EVD的检测性能随噪声功率不确定度的增大而下降,而由于降维后的DRCEVD仍为CFAR检测器,DR-CEVD的检测性能与噪声功率不确定度无关,表现出对噪声不确定性的稳健性,同时这种稳健性对于VLA和HLA都成立,因此在非平稳的噪声环境中,噪声功率难以估计时DR-CEVD是更佳的选择.
5.3 采样模态信息及其对降维程度的影响
阵列采样模态信息的“丰富程度”决定了阵列接收声场的有效模态空间维度,进而影响了降维程度,图13中给出了声源激发的各阶简正波模态函数幅值在波导深度上的变化和各阶水平波数分布,其中阵元数为30,声源频率为150 Hz,水平方位角θ=0°.由图13(a)可知,接近海面和海底时模态函数幅值为零的阶次较多,因此当阵列位于靠近海面或者海底位置时,冗余模态信息增多,降维程度将会加强.由图13(b)可知,各阶水平波数在数值上非常接近,这使得HLA采样的各阶模态,也就是各方向向量之间具有强相关性.因此相较于VLA,HLA的模态矩阵包含着更多冗余信息,有效模态空间维度更小,降维程度更强 (如图10(b)和(d)所示).

图11 不同信噪比下的检测概率曲线对比,快拍数 L=20 (a) VLA; (b) HLAFig.11.Probability of detection curves of different detectors,snapshot number L=20 : (a) VLA; (b) HLA.
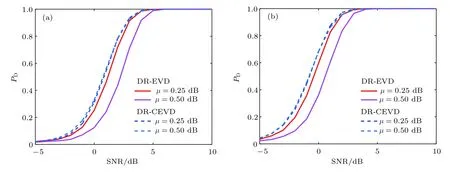
图12 噪声功率不确定,不同信噪比下检测概率曲线对比,快拍数 L=40 (a) VLA; (b) HLAFig.12.Probability of detection curves of different detectors when noise power is uncertain,snapshot number L=40 : (a) VLA;(b) HLA.
阵列配置和声源频率是影响阵列采样模态信息的两个重要因素,前者决定了阵列采样模态信息的结构特征,后者决定了模态采样信息的阶数,进而影响降维程度.首先考虑阵列配置对阵列采样模态信息的影响,这里阵列配置是指阵元间距与布放深度.给出了降维系数随阵元间距和阵列深度的变化曲线,如图14所示,仿真参数同上.由图14(a)可知,降维系数随阵元间距的增大而减小,这是因为阵列孔径增大时采集到更大尺度上的模态信息,模态信息的“丰富程度”加强,各阶模态之间的相关性下降,有效模态空间维度增大,降维程度相应减弱; 同时在减小速度上VLA远快于HLA,这与图13(b)的分析结果一致.由图14(b)可知,阵列深度改变时降维系数变化幅度不大,这是因为阵列采样的模态信息的总量变化不大,同时观察到阵列深度接近海面或海底时降维系数较大,这与图13(a)的分析结果一致.需要指出的是,这里仅讨论了阵列配置对降维程度的影响,实际当中的阵列配置还要考虑分辨率、传播损失等因素,并不意味着阵元间距越小越好.
声源频率决定了声源激发模态阶数多少,当声源频率增大时,波导中传播的模态数目增多,进而阵列采样模态信息的“丰富程度”加强,有效模态空间维度增大.图15给出了降维系数随声源频率的变化曲线,其中阵列深度为200 m,可以看出当声源频率增大时,降维系数减小.当频率增大到一定值时(如频率为400 Hz,VLA,d=4 m),降维系数减为零,DR-GLR不再具有降维的作用.
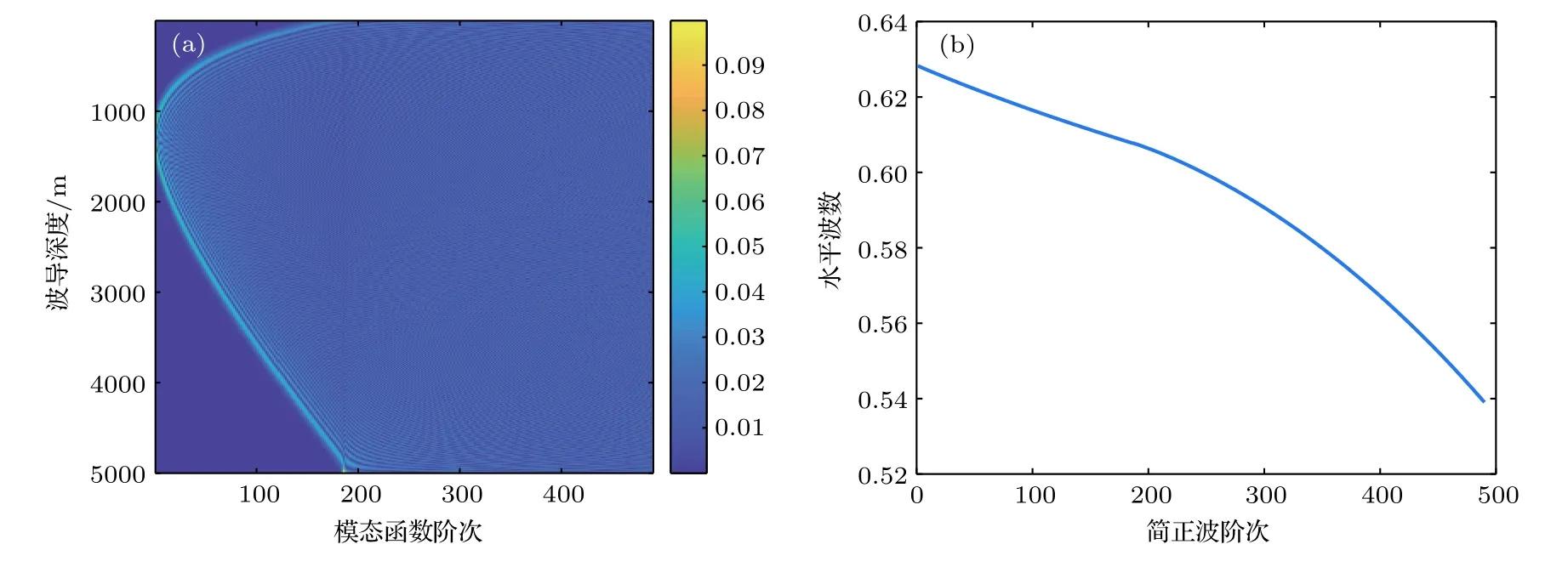
图13 声源激发的各阶简正波模态函数和水平波数 (a)各阶模态函数幅值随波导深度的变化; (b)各阶水平波数分布Fig.13.Modal functions and horizontal wavenumber of various normal modes excited by the acoustic source: (a) Modal functions along with various depths; (b) distribution of various horizontal wavenumbers.
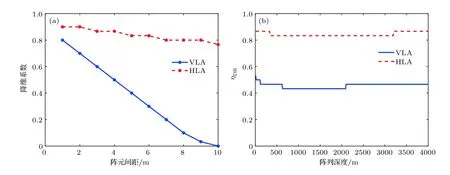
图14 阵列配置对降维程度的影响,N=40 (a) 阵列深度100 m; (b) 阵元间距4 mFig.14.The influence of array configuration on the degree of dimension reduction,N=40 : (a) Array depth of 100 m; (b) hydrophone spacing of 4 m.
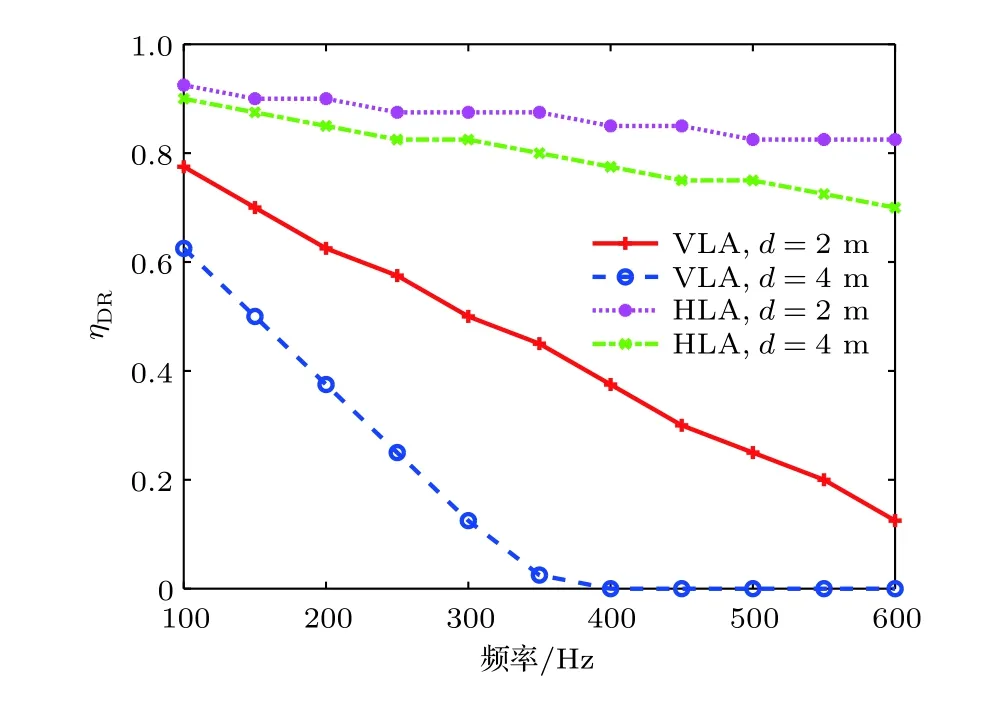
图15 降维系数随声源频率的变化曲线Fig.15.The dimension reduction coefficient varying with increasing frequency.
6 结 论
本文研究了深海波导中的水下窄带声源检测,利用GLR方法推导并得到了两种检测器EVD和CEVD,在此基础上提出了一种基于简正波模态采样信息降维处理的广义似然比检测方法.通过理论分析与仿真实验得到了如下结论: 1)多快拍下的GLR检测统计量是基于对SCM最大特征值的处理,相较于EVD,CEVD以牺牲部分检测性能的代价获得了恒虚警特性,即在噪声功率不确定情况下仍能实现稳健的检测性能; 2) 理论分析表明,在相同信噪比下,GLR检测器的输出信噪比随接收数据快拍数的增大而增大,随空间维度的减小而增大,因此可考虑通过对接收数据的降维处理改善GLR检测的检测性能; 3)通过舍弃冗余模态空间获得有效模态空间,利用保留的有效模态空间构造降维矩阵并对接收数据进行降维处理,可在几乎不损失阵列接收信号能量的前提下降低接收数据的空间维度; 4)由于接收简正波模态信息的差异性,VLA和HLA的DR-GLR检测统计量具有不同的形式(后者需要在角度上扫描),并且由于HLA采样各阶行波信息之间的强相关性,使得HLA接收声场位于更低维的有效模态空间; 5) 降维处理对GLR检测器的检测性能改善程度与降维程度呈正相关,降维程度随阵元间距和声源频率的增大而减弱.
