马铃薯联合收获机发展现状及趋势
2019-09-19杜木军王晋王伟刚于文波杨华
杜木军 王晋 王伟刚 于文波 杨华


摘 要:根据我国马铃薯主粮化产业不断提升的现状,综合介绍国内外主流的马铃薯联合收获机的发展现状,预测未来马铃薯联合收获机的发展趋势,为马铃薯联合收获机械产品本身及市场存在的问题,提出相应的对策和建议。
关键词:马铃薯;联合收获机;发展现状;趋势
中图分类号:S225.71 文献标识码:A
doi:10.14031/j.cnki.njwx.2019.08.005
0 引言
马铃薯在我国分布广泛,已经正式被确定为国家的主粮之一,农业部提出2020年马铃薯种植面积扩至1亿亩以上。在中国粮食产量近年来屡创新高的情况下,将马铃薯作为主粮产品进行产业化开发,这一粮食战略颇受全球关注,但是相应的我国马铃薯机械化水平发展还很滞后,尤其是联合收获机械的紧缺成为其产业发展的最大障碍。
目前,年人均消费马铃薯前六名的国家有白俄罗斯、乌克兰、波兰、爱沙尼亚、俄罗斯、哈萨克斯坦,这些国家马铃薯收获机主要以马铃薯挖掘机为主;德国、美国和比利时等国家主要以应用马铃薯联合收获机为主,这些国家的马铃薯种植机械化程度发展也相对较高。然而,我国的马铃薯种植机械化程度相对落后,在马铃薯收获阶段基本依靠劳动力,成本高、效率低、工人劳动强度大,耗费大量的人力物力。因此,开发和研究马铃薯联合收获机是马铃薯主粮化战略设备供应的后续力量[1]。
1 国内外马铃薯联合收获机发展现状
1.1 国外马铃薯联合收获机发展现状
国外马铃薯联合收获机起步早、发展快、技术含量高。马铃薯联合收获机一次作业可完成去秧、挖掘、输送、去土、清选、收集、装车等环节。整机融合了机、电、液、仪技术并配套系统,作业过程中在驾驶室内可随时监测收获情况并进行设置和调整,智能化程度高。但是国外的设备并不能完全适合我国国情,由于其价格高昂、运输距离远、配件不及时以及售后服务不能及时得到保障,使得国外设备在国内市场占有率并不是很高,仅占市场份额的10%左右,而且随着国内马铃薯收获技术水平的提高,研发产品的质量和售后均能得到有效保证,进口的马铃薯收获机有逐渐淡出我国市场的趋势。
德国格力莫公司生产的马铃薯联合收获机技术处于全球领先水平,自动化程度高,格力莫EVO 280(如图1)在性能和效率方面树立了新标准。该机配备三个分离器,独特的无级变速驱动器和8 t的料斗,可以在保护作物的同时实现最大输出。
AVR公司生产的马铃薯联合收获机(如图2),设计合理,结构紧凑,功率小,速度快,可靠性强。筛分网可有效的将茎秆与块茎分开,从薯流中去除多余的松散土壤和茎秆。三排旋转梳可以清除薯流中的石块。捡拾台便于人工目视检查并捡除杂物和土块,将马铃薯引流至料斗,料斗一旦装满,卸货平板可以在一分钟内将其清空。
DEWULF两行牵引式马铃薯料斗收获机(如图3)基于众所周知的收获和筛分原理,配备收获网,大型环状升降电梯,一个或两个刺状带和大型料斗,增加生产能力,该机操作简单,可提供较大生产能力,专为大型农场而设计。
1.2 国内马铃薯联合收获机发展现状
我国马铃薯的收获方式以人工收获或半机械化挖掘为主,主要依靠小型挖掘机挖掘后,铺放在地表,再由人工捡拾装袋,这种收获方式效率低下。随着人工成本逐年提高、雇工难等问题,在黑龙江、内蒙古、新疆等地开始使用大型马铃薯联合收获机械。国内的农业机械研究部门及马铃薯设备生产厂家已经将研发方向瞄准在马铃薯联合收获机上。
目前,国内马铃薯收获机种类繁多,但大型联合收获机基本完全依靠进口,国内研发主要以中小型挖掘机和自动化程度不高的小型收获机为主。
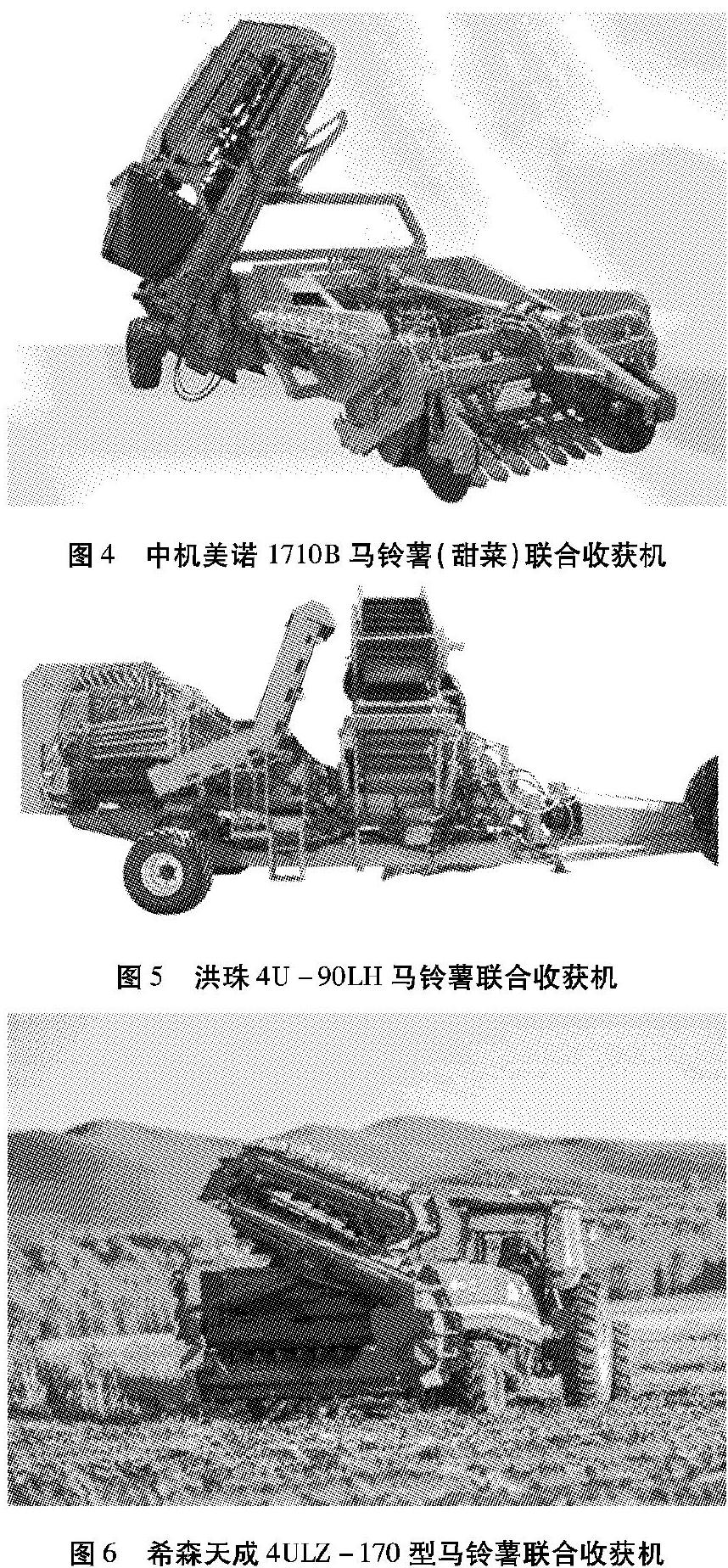
中机美诺马铃薯收获机(如图4)适用于沙性或中性土壤,一次性完成挖掘、输送分离、除秧、升运装车作业,通用性强,可以收获马铃薯,也可以收甜菜,行走轮后置,轮距调整方便,分离筛坡度较缓,便于上薯,伤薯率低,浮动圆盘刀设计,更有效切断杂草,减少挖掘阻力,采用国际先进工艺,铸胶驱动轮,较小链条磨损,提高机器寿命,作业效率高,成本回收快。
洪珠4U-90LH马铃薯联合收获机(如图5)采用先进工艺,联合收获、抖土、分离、集装多项功能于一体,大大节省了劳动力,无论在沙土、沙壤土、中黏土等不同土质条件下都能发挥优良的性能,去皮率低,分离性好,适应性强。
希森天成4ULZ-170型牵引式马铃薯联合收获机(如图6),先由挖掘铲进行挖掘,同时仿形限深轮进行薯土疏松与挖掘限深,挖掘后通过输送网筛进行薯土分离与薯块输送,在薯块输送的过程中进行薯秧分离,薯土、薯秧分离后,干净马铃薯进入集薯输送装置,最后通过集薯输送装置将干净的马铃薯输送至运输车中,通过运输车将收获后的马铃薯转运走。该马铃薯联合收获机能实现马铃薯的一次性挖掘、薯土分离、薯秧分离、集中收集输送等作业,一次可收获两垄,作业效率达到0.33 hm2/h以上,且损失少、破皮率低、伤薯轻、含杂少。
德沃公司生产的4UML-180型马铃薯联合收获机(如图7)是根据我省和国内马铃薯规模化种植情况,结合土壤环境,具体研究相应的收获技术,一次作业完成仿形挖掘、去土、分秧、升运、除杂、入料斗、装车等功能,解决马铃薯规模化种植收获难、人工劳动强度大、成本高、效率低、雇工难以及在不同土壤状况下实现马铃薯收获的问题。新型分秧机构和多模式清薯机构,解决现有分秧机构复杂、分秧效果不佳和净薯率低以及黏土情况下土薯分离不彻底和杂物多的问题,整机电、液、仪一体化协调操控,整机智能控制。
2 存在的问题及发展趋势
2.1 存在的问题
(1)自动化程度不高,还需要人工分拣;
(2)清薯机构模式单一,设备净薯率低;
(3)马铃薯在收获过程中破损率高,链条使用寿命短;
(4)收获设备多种驱动轮使用寿命短,更换频率高;
(5)分秧机构复杂,分秧效果不佳。
2.2 发展趋势
在马铃薯主粮化的大背景之下,加强农机和农艺的结合,力争通过几年的努力,促进马铃薯装备的结构调整,提高收获效率,降低人工劳动强度,增产增收,减少损失。
研究适合不同土壤状况下的马铃薯联合收获技术,研究人工辅助除杂技术及料斗系统,实现马铃薯清洁技术。整机电、液、仪一体化系统,实现智能控制,促进向机电一体化发展。马铃薯机器的工作条件比较恶劣,容易导致零部件的腐蚀或断裂,因此在研究和设计马铃薯收获机器时要从结构、工艺和材料方面分析,以先进制造工艺保证机器的高强度,以提高零件的使用性和可靠性,优化联合收获机整体结构,提高使用性能,开发一种更适合中国技术的仿形挖掘、去土、分秧、升运、除杂、落料、装车等功能于一体的马铃薯智能联合收获装备,促进马铃薯收获机技术创新和马铃薯种植业的快速发展;为提高作业效率,可研发根据不同的地况,作业时自动仿形的挖掘系统;增加收获行数,由两行向四行或多行作业发展;结构部件多功能模块化,适用不同的作业环境,同时便于生产和检修维护;配置作业监控系统,可在驾驶室内对作业状况一目了然;改进链条设置,减少破皮率的产生。
3 结论
我国马铃薯联合收获机的研究与设计起步相对国外较晚,主要以小型设备为主,机械联合收获水平相对较低,但随着马铃薯种植面积的不断扩大和机械化水平的不断提高,必须提高马铃薯联合收获机的技术水平,提高作业效率,降低成本,减轻劳动强度,提升收获品质,实现马铃薯的规模化收获作业[2]。
参考文献:
[1] 王福义.马铃薯收获机械发展研究[J].农业科技与装备,2010(12)
[2] 单爱军,刘俊杰,崔冰冰.马铃薯收获机现状与发展趋势[J].農机化研究,2016(4)
