3-CPS并联机器人的机构分析及仿真研究
2019-09-19
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
并联机器人具有精度高、承载能力强、刚度大、速度快的优点,逐渐成为国内外研究的热点,理论也逐渐成熟,尤其对六自由度并联机器人的研究越来越广泛[1]。传统Stewart平台具有支链运动耦合、工作空间小等缺点。因为实际应用中会有局部几个自由度精度高于其他的自由度的应用情况,例如大型望远镜的子镜运动中,其piston 和tilt/tip方向的运动误差对成像质量的影响远远高于其他自由度方向的运动误差,如果采用Stewart平台,由于平台的旋转对称性,为了获得稳定的精度和低程度的振动,需要Stewart平台的6个驱动器的精度保持一致,为保证子镜较高的运动精度而选择6个高精度的驱动器很不经济[2]。
1 机构介绍
1.1 机构模型简介
如图1所示,为该机构的Pro/E模型图,该机构在等边三角形底座的3个角上各设置一个与之垂直的立柱,在这3个竖直圆柱副的输出构件的末端各固定连接一个水平移动副,每个可伸缩的水平摆臂杆与底座的三边相应地成一定角度;每个水平移动副的输出构件末端再固定连接一个球副,用来与上方动平台连接。为了达到使机构运动解耦的目的,每组支链中的两个驱动器采用正交连接的方式,每组支链中的可伸缩立柱采用3个相同精度的线性步进驱动电机进行竖直方向驱动,3条水平伸缩摆臂杆采用3个相同精度的水平方向驱动的线性步进驱动电机,从而达到运动解耦的效果[3]。

图1 机构的模型示意图
1.2 机构自由度计求解
该机构具有3条相同的支链,每条支链是由运动副和构件按一定方式连接而成,组成闭环结构,从定平台到动平台的运动副依次为:圆柱副、移动副、球副,构成一种新型的3支链六自由度摆臂式并联机器人机构。
其自由度数可有下式核定:
(1)
式中,F为机构自由度数;n为机构中构件数;g为机构中运动副数;fi为机构第i个运动副的自由度数[4]。
根据上文描述,在此机构中n=1+3+3+1=8,g=3+3+3=9,∑fi=(2+1+3)×3=18。
可以算出:
F=6×(8-9-1)+18=6
该机构具有6个自由度。
1.3 机构坐标系的建立
为了便于后续的分析,建立机构的坐标系如图2所示。在机构底座上建立静坐标系O(X-Y-Z),静坐标系固连在定平台上,原点O位于ΔA1A2A3外接圆圆心,X轴沿OA1方向,Z轴垂直于三角形底座竖直向上,由右手螺旋法则可获得Y轴的方向。动坐标系O′(X′-Y′-Z′)固连于动平台上,原点O′位于ΔC1C2C3外接圆圆心,在初始位置时与静坐标系X轴方向一致,Z′轴垂直于动平台竖直向上,在初始位置时与静坐标系Z轴在同一直线上,Y′轴由右手螺旋法则获得。

图2 机构简图及坐标系示意图
2 机构运动学分析
2.1 机构反向运动学求解
对于分析机构反向运动学问题,要根据给定的3个位置的位移变换和欧拉角变换求出机构位置变化后连接点在静坐标系中的坐标,通过欧氏距离公式可以得到3条竖直可伸缩立柱杆和3条水平可伸缩摆臂杆的长度变化量[5]。因此,建立机构动平台运动前后的相对位置变化的示意图,如图3所示。

图3 机构动平台变化相对位置示意图

(2)
式中,Rn为坐标变换矩阵[6];点1′,2′,3′在静坐标系O(X-Y-Z)中的坐标表示为xn,yn和zn,则
(3)
式中,h0为并联机构竖直圆柱杆的初始高度,动平台的平移量由3个变量表示为Δx,Δy和Δz,则
(4)
式中,x,y,z为点1,2,3在静坐标系O(X-Y-Z)中的坐标。
由于该并联机器人的解耦特性,点1′,2′,3′的Z轴坐标只由竖直杆的高度决定,其次并联机构在不同姿态下水平摆臂杆的长度li为
(5)
式中,x0和y0分别代表点1,2,3在静坐标系O(X-Y-Z)中X轴和Y轴的分量,求相应杆长度时,分别代入杆端相应点的坐标,初始状态下3条水平摆臂杆的长度相同,所以3条水平摆臂杆的初始长度l0为
(6)
可以求得3条可伸缩水平摆臂杆的长度变化量Δli为
Δli=li-l0
(7)
2.2 机构正向运动学求解
对于机构的运动学正向运动学分析,是已知可伸缩竖直圆柱杆和可伸缩水平摆臂杆的长度h1,h2,h3和l1,l2,l3,求解机构动平台的位置姿态。通常情况下,给定一组竖直杆和水平杆的长度,将会有很多种平台结构,在数学问题中,多解是存在的,而在实践中,具体情况只有一种。为了解决运动学正解问题,已经研究出很多种方法,其中大多数是基于迭代的数值解法[7]。
其基本原理是,选取机构位姿坐标作为迭代变量,以某一个适当的近似数值作为初值,代入坐标转换公式,解出球副点C1、C2、C3的位置坐标。依据已知的支链长度修正点Ci(i=1,2,3)的坐标,重新求解迭代变量,如此反复,逐次逼近C1、C2、C3的真实位置。
2.2.1 初值的赋值
根据3-CPS六自由并联机构的结构特征,和已知的水平杆、竖直杆的长度,可以采用线性近似的方法,确定初值。这里采用一种简单的初值给定方法,称为中立位置赋值法[8]。比较粗糙的初值,既可以检验算法对初值的敏感程度,也可以看出算法的广泛适应性。求解近似位姿的初值选取如下:
α0=0,β0=0,γ0=0
式中,α,β,γ分别为机构动平台绕X轴、Y轴、Z轴转动的角度。
2.2.2 迭代求解过程
点Ci(i=1,2,3)在定坐标系O(X-Y-Z)中的坐标Ci0(i=1,2,3),用坐标转换公式求出Ci,新的Ci的坐标,不一定是真实的上平台球副中心位置坐标。对于六自由度并联机器人,需要修正Ci的3个坐标。为此做如下修正,修正后Ci的坐标为Ci0,设点Ai和Ci之间的距离为Li,则有

(8)

调整坐标后的C1、C2、C3更接近机构中对应的3个球铰的真实位置。利用修正后C1、C2、C3的坐标,计算得到新的迭代变量。已知不共线的三点构成一个平面,计算修正后的Ci0即可得到机构的新位姿为
(9)
新的迭代变量姿态坐标
(10)
式中,γ为机构绕Z轴转动的角度。
已知C1、C2、C3三点不共线,以此三点代替动平台平面,设该平面的法线方向为(NX,NY,NZ),由三维空间几何知识可得
(11)
式中,x1为C10x;y1为C10y;z1为C10z;以此类推。
进一步即可求得机构绕X轴转动的角度α和绕Y轴转动的角度β,则
(12)
(13)
迭代次数越多,误差越小,判断迭代收敛的条件为
Δmax≤δ
(14)
式中,Δmax为求出的每一个新参数与上一次参数差值的绝对值中的最大值,δ作为收敛条件用于控制计算精度。
如果不符合收敛条件,则令x0=x1,y0=y1,z0=z1,α0=α1,β0=β1,γ0=γ1并重新进行迭代。如果符合收敛条件则完成迭代。
3 机构速度和加速度分析
根据机构位置正解和逆解的分析,将点Ci和Ai的坐标设为已知量,进一步对机构的速度和加速度进行分析。
3.1 机构的速度分析
由向量AiCi并代入点Ci的坐标,则
Li=R[xciycizci]T+T-OAi
(15)
对式(15)两边分别求导,由于坐标原点O到点Ai的距离不变为常量,所以求导后为0,则
(16)
因为机构具有部分解耦特性,式(16)中点乘相应的方向向量便可得到机构水平杆和竖直杆的速度并整理,则可得

(17)
式中,ω和T的导数即为机构上部动平台的在静坐标系下的角速度和平移速度。
3.2 机构的加速度分析
在速度分析的基础上,继续作微分求解,即可得到机构的加速度,由于水平杆的矢量求导即为向量Li的x和y分量,则可整理得出

(18)
式中,方向向量ni的导数为
(19)
4 数值仿真
4.1 机构反向运动学模型的数值仿真
完成运动学求解后,对运动学的逆解进行数值验证[9],从并联机构的初始状态开始,在X轴和Y轴方向进行[-20 mm,20 mm]的平移和[-2.86°,2.86°]的旋转,Z轴方向进行[-10 mm,11 mm]的平移和[-2.86°,2.86°]的旋转,如图4~图7所示,为4个典型的上部动平台在X轴和Z轴方向的平移和旋转的运动学仿真非线性关系图,图中act1v,act2v,act3v和act4h,act5h,act6h分别代表3个竖直方向的驱动器和3个水平方向的驱动器。
从图4可以看出,在X和Y方向的平移运动主要由3个水平方向驱动器act4h,act5h,act6h提供。
从图5可以看出,绕X轴和Y轴方向的旋转运动主要由3个竖直方向驱动器act1v,act2v,act3v提供,而与Z方向的平移运动和绕Z轴的旋转运动无关。
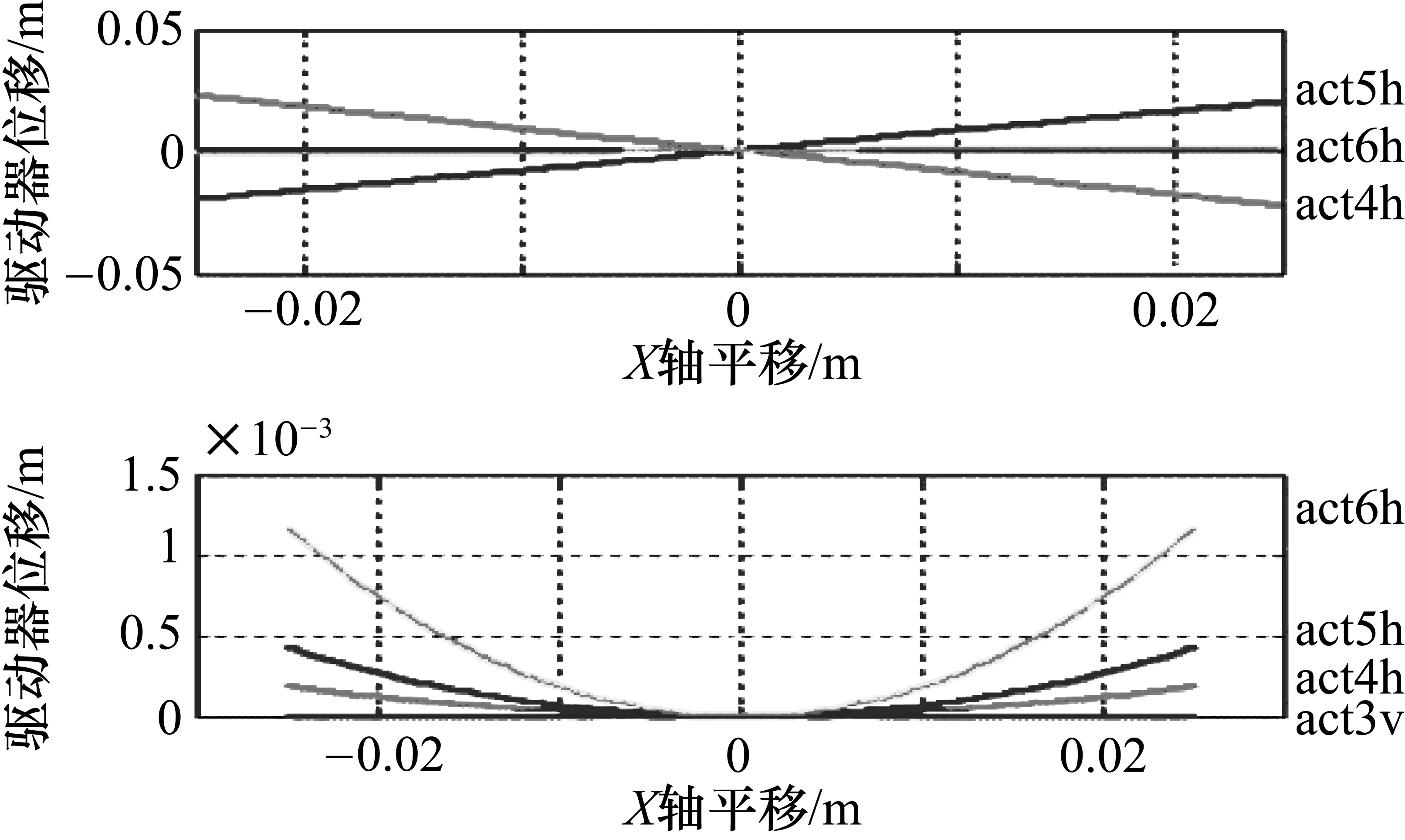
图4 驱动器在X轴方向直线运动非线性关系图

图5 驱动器绕X轴旋转运动非线性关系图

图6 驱动器在Z向直线运动非线性关系图

图7 驱动器绕Z轴旋转运动非线性关系图
从图6和图7可以看出,解耦特性主要在Z方向的平移和绕Z轴的旋转,Z方向的平移运动只由3个竖直线性驱动器act1v,act2v,act3v决定,而绕Z轴的旋转运动只由3个水平方向的线性驱动器act4h,act5h,act6h来决定,即便并联机构在任意其他姿态而不是初始状态,其他驱动器也不会对Z方向的平移和绕Z轴的旋转造成影响。
通过分析4个典型的上部动平台在X轴和Z轴方向的平移和旋转的运动学仿真非线性关系图,表明该并联机构按照预期运动解耦,具有良好的解耦和旋转对称性[10]。
4.2 机构正向运动学模型的数值仿真
在正向运动学求解的基础上,通过对每一个驱动器的位移范围进行扫描,分别对上部动平台进行6次位移输出,从而对机构的线性度进行了研究,竖直驱动器运动模拟仿真图如图8所示,机构运动的非线性影响如图9所示。

图8 竖直驱动器运动模拟仿真图

图9 驱动器运动线性关系影响图
从图8和图9可以看出,在实际位移跨度超过[0,11]mm的范围时,动平台的6个位移均呈现出超线性,其中线性度最大的偏差为2.5%。旋转中的非线性可以忽略不计,X和Y方向的旋转只有约0.1‰的偏差,而Z向旋转驱动11 mm只导致了小于1 arcmin的误差[11]。
5 误差分析
完成机构运动学仿真分析后,对该六自由度并联机器人驱动器的精度进行了误差分析。采用的是蒙特卡罗(Monte Carlo,MC)仿真分析方法,MC方法同时又可称为统计实验法或随机模拟法,是一种以概率论为理论基础的可靠性评估方法,MC分析方法在机构的精度评估中已经得到了广泛的应用[12]。
首先选定两种自由度组合,分别是X轴和Y轴方向的移动,绕X轴和Y轴的转动,基于高斯的中心极限定理,通过Matlab仿真软件进行仿真计算[13],得出并联机器人动平台在选定的两种自由度组合下的误差分布图,X轴和Y轴方向的移动误差分布图如图10所示,X轴和Y轴方向的旋转误差分布图如图11所示,可以以其标准偏差为评估值,1σ代表动平台在X和Y方向移动1.7 μm,绕X轴、Y轴旋转1.7 arcsec 的误差值。

图10 X和Y方向移动误差分布图

图11 X和Y方向旋转误差分布图
X和Y方向的移动是由3个水平方向的驱动器来控制的,因此从图10可以看出3个水平方向的驱动器的误差均匀地分布在[-7 μm,7 μm]范围内。
X和Y方向的旋转是由3个竖直驱动器来控制的,因此从图11中可以看出,3个竖直方向的驱动器的误差均匀地分布在[-5 arcsec,5 arcsec]范围内。
从图10和图11中可以看出每个驱动器的误差均匀地分布在一个有界范围[-5σ,5σ]内,并且根据正态分布的性质,正负误差具有对称性[14],所以传递到末端动平台位姿误差也是有界的。研究表明,该机构的3个相同竖直驱动器的精度与传统六自由度Stewart并联机器人中采用的高精度驱动器精度相同,而3个水平驱动器采用3个相同的普通精度的驱动器即可满足大型天文望远镜子镜较高的运动精度,相比传统六自由度Stewart并联机器人,3-CPS并联机器人可以用3个相同高精度驱动器和3个普通精度驱动器代替传统六自由度Stewart并联机器人中6个相同高精度驱动器,从而降低了生产成本。
6 结束语
本文运动学分析中应用了矩阵代数法和数值迭代法,进一步推广了这两种方法在并联机器人运动学分析中的应用,是运动学分析方便有效的工具。
通过运动学仿真分析,表明该三支链六自由度的并联机构具有独特的运动解耦优势,有利于运动控制,并且具有良好的线性和旋转对称性,允许动平台和底座平面共面和相互穿越,适用于工作空间高度小而位移及自转范围较大的场合[15],解决了传统Stewart平台支链运动耦合、工作空间小的问题。
由于该机构独特的构型设计,可以应用于大型天文望远镜支撑平台。通过误差分析表明,该机构的竖直驱动器采用3个相同的高精度驱动器,3个水平驱动器采用3个相同的普通精度驱动器即可,大大降低了生产成本,使得该机器人更适用于生产实践。
