基于无人机遥感可见光影像的农作物分类*
2019-09-19吴文斌段玉林赵立成
刘 斌,史 云,吴文斌,段玉林,赵立成
(中国农业科学院农业资源与农业区划研究所/农业农村部信息技术重点实验室,北京 100081)
0 引言
无人机遥感具备高分辨率、操作简单、获取数据快及低成本等特点,可以快速针对某一区域进行影像采集工作,获取更精确的作物分布信息,成为卫星遥感和航空遥感的重要补充,对作物监测技术的发展和应用具有重大意义[1-2]。
准确的作物分类仍然是一项具有挑战性的任务,有效进行多种特征变量结合并使用是提高农作物遥感分类精度的关键。目前已有学者基于无人机影像针对农作物分类信息提取作了大量的研究,并提出相关的技术和方法。利用无人机影像进行农作物分类方法主要分为光谱特征及纹理特征两类。基于光谱特征的农作物分类方法主要是通过计算各类别光谱统计量,构造植被差异指数,并在这些植被差异指数的基础上通过统计学习实现农作物遥感分类。其中,汪小钦等[3]提出了一种新的可见光波段差异植被指数,实现了健康绿色植被信息的提取。李鑫[4]提出了基于红绿波段的增强型红绿差值指数,对蓝藻信息识别可信度高。针对多光谱数据,刘伟等[5]结合NDVI、NDWI、及均值特征确定了最佳特征组合,改善了裸地与沙石的区分。Pena等[6]使用六波段多光谱影像,实现了在玉米生长早期的杂草制图。Doi[7]对多光谱影像进行彩色合成,增加了相似像元的可区分性。由于单纯依赖多光谱特征的农作物遥感分类存在同物异谱及同谱异物的现象,此类研究多适用于分类对象单一,分类特征针对特定对象的情形。
另外,通过影像滤波提取纹理特征,可以实现在遥感影像中对特定作物的识别或分类。如李蕴雅等[8]建立相应的纹理规则集,对无人机影像进行树冠的提取。郭鹏[9]使用可见光影像,选取亮度、饱和度和红色二阶矩作为最优分类特征对农田作物进行分类,分类精度明显高于颜色指数方法。李宗南等[10]选取最适宜区分正常和倒伏玉米的特征为灰度共生矩阵的红、绿、蓝色均值特征。通过比较基于色彩特征或纹理特征的倒伏玉米面积提取结果,基于纹理特征分类结果更准确,提取误差显著低于基于色彩特征提取方法。但是,农作物纹理特征随着农作物、遥感影像空间分辨率及波段的变化而变化,因此在复杂种植结构区域影像中存在纹理特征确定困难等问题。
此外,不同农作物间的冠层结构差异非常明显,作物理性状也可用于分类,如高度、形态、叶倾角等。但传统遥感无法获得高分辨率冠层结构数据,随着无人机遥感及摄影测量技术的快速发展,从而能够获取更多类型的数据,为农作物遥感分类提供了新的发展空间,因此如何从无人机影像中提取作物物理性状成为新的研究热点[11]。其中,Kim等[12]通过手动采集地面控制点生成TIN(Triangulated Irregular Network)模型进而生成DEM(Digital Elevation Model)数据,计算了DSM和DEM的差值nDSM(normalized DSM),选择RGB波段、nDSM和改进NDVI为特征,实现了地表覆盖类型分类。杨琦等[13]采集了蔗糖全生育期的高清数码影像,建立各生育期作物表面模型CSMs(crop surface models),并提取株高,该方法表明CSMs提取的株高拥有较高的精度。Bendig等[14]证实了从CSMs提取的株高具有良好的精度,并建立了大麦株高与生物量的估算模型。研究表明,利用无人机获取的数字表面模型可以提取地表信息,如作物株高信息等。在农田区域下,提取分类特征nDSM需要DEM,控制点布控及量测较难,难以生成高精度DEM。同时,目前利用DSM数据提取分类特征的研究较少。
基于此,文章的核心思路是围绕如何利用作物在光谱和空间维度上的联合特征尤其是作物高程特征以提高农作物分类精度。在该研究中,通过无人机搭载可见光相机获得高分辨率图像和数字表面模型,进而利用两个不同时期作物的DSM数据,生成差异数字表面模型(DDSM),突出作物生长差异特征,并将该特征引入农作物分类中。同时,分析并提取农作物在光谱及空间维度上的联合特征,通过比较分析变异系数和类间差异系数,构建了基于色彩、纹理、高度特征组合的SVM分类模型用于农作物精细分类。
1 研究区与数据
研究区位于黑龙江省农业科学院民主研究基地,基地面积约为7.5km2,地形有较大起伏,测区内包含水稻、玉米、大豆及马铃薯等多类农作物。测区面积适中,作物类型多样,种植结构复杂度高,是检验作物分类算法的理想实验区域。该研究中所涉及的实验数据分两期在该区域进行采集,分别是2017年8月及2018年6月。图像获取设备为SONY单反相机,选用固定翼无人机作为相机的搭载平台。无人机获取的影像为RGB图像,且在无人机航拍过程中,旁向、航向上图像的重叠率均达到80%,满足生成RGB正射影像的要求。采用Smart3D软件对获取的图像进行处理,输出实验对象区域的RGB正射影像和数字地表模型。实验基地如图1。
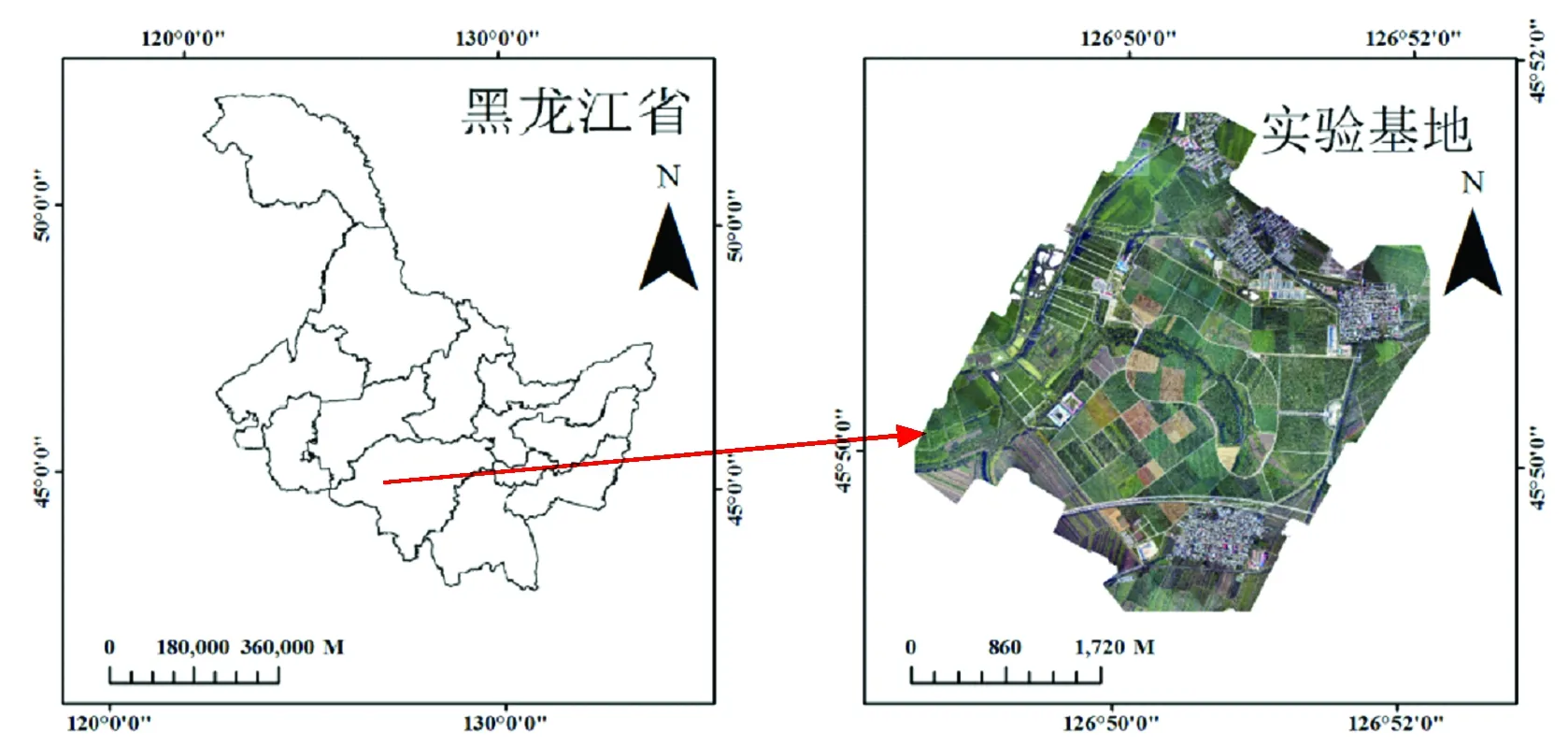
图1 研究区域
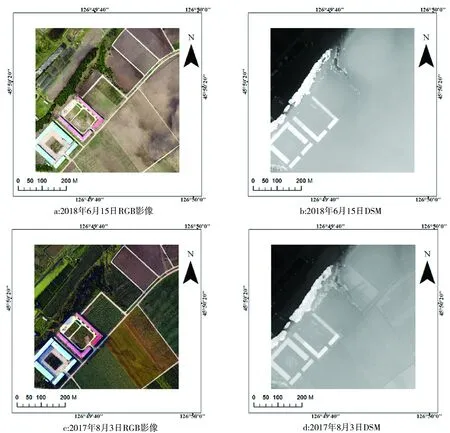
图2 原始RGB影像及DSM
2 基于无人机影像的农作物分类方法
2.1 RGB正射影像及数字地表模型获取
该研究中研究对象区域的RGB正射影像及数字地表模型见图2。其像大小为6 000×6 000像素,地面分辨率为0.1m。其中,在2018年6月采集实验数据时,试验区域作物尚处在作物生长初期,苗高较低,可视为实验区域的背景数据。
2.2 无人机影像农作物分类方法
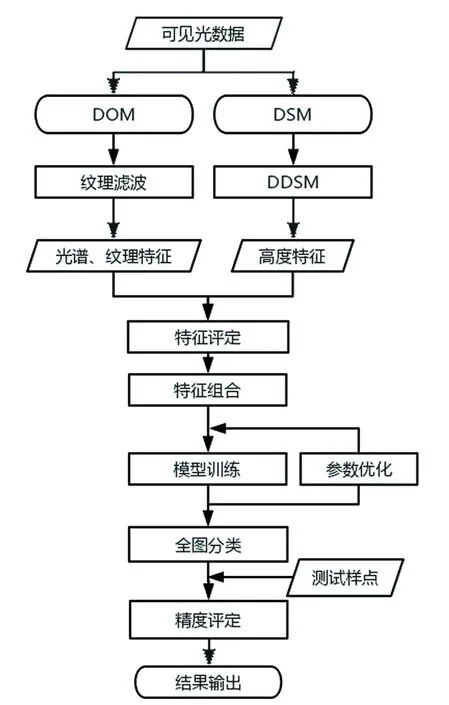
图3 技术路线
表1 农田地物样本数
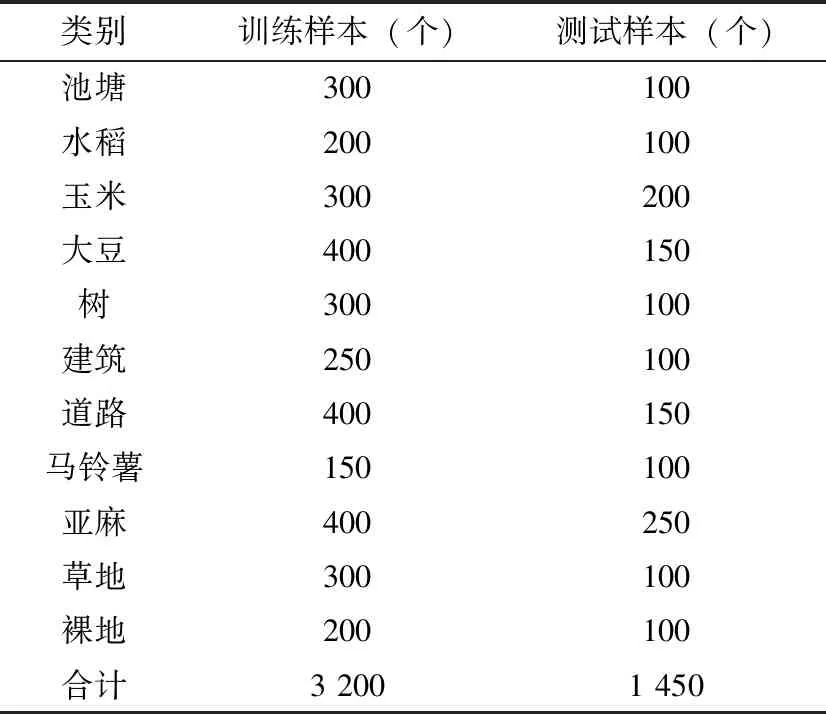
类别训练样本(个)测试样本(个)池塘300100水稻200100玉米300200大豆400150树300100建筑250100道路400150马铃薯150100亚麻400250草地300100裸地200100合计3 2001 450
由于无人机遥感可见光影像仅含有红、绿、蓝3通道的灰度信息,难以实现对农作物类别的区分,因此该研究首先通过纹理滤波获得研究区域农作物纹理信息; 然后利用两个不同时期作物的DSM数据,生成差异数字表面模型(DDSM,Difference of DSM),分析并提取农作物在光谱及空间维度上的联合特征,通过比较分析变异系数和类间差异系数,构建了彩色特征、纹理特征、高度特征组合; 分别基于的组合训练SVM分类器,进行农作物分类; 以地面真值结合目视解译所得到的样点农作物类别的实测值,以检验分类结果的精度。技术路线如图3所示。
2.3 分类样本选择
根据目视分析和地面实际调查,确定研究区域内地物分为11类,包括池塘、水稻、玉米、大豆、树、建筑、道路、马铃薯、亚麻、草地和裸地。根据地物的面积比例大小选取样本点数,如表1所示。
2.4 特征分析及选取
该文通过提取无人机影像中的光谱、纹理、高度等特征,分析并筛选适于农作物分类的特征。滤波处理可以获得农作物的纹理特征,有助于解决同谱异物和同物异谱的问题,进而提高农作物的分类精度。该研究中滤波处理在ENVI5.3环境下进行,滤波窗口大小为27×27。通过滤波处理,可得到相应波段的均值、方差、协同性、对比度、相异性、信息熵、二阶矩和相关性等特征信息。
进一步地,利用两个不同时期作物的DSM数据,生成差异数字表面模型(DDSM),突出作物生长差异特征,并将该特征引入农作物分类中。在该研究中,在2018年6月采集实验数据时,在东北地区该时期为常见农作物生长初期,苗高较低,可视为裸地。2017年8月份是常见作物生长中后期,因此,将两个时期的数字表面模型进行差值计算,可获得差值数字表面模型DDSM,得到不同作物生长高度信息。
同时,考虑到不同作物株型不同,成片种植的作物在空间上呈现的局部邻域高度信息不尽相同,因此再将DDSM影像进行滤波处理,获得邻域波动信息,并进行特征评价挑选出适合农作物分类的特征。
DDSM=DSM1-DSM2
(1)
式(1)中,DSM1为2018年6月15号DSM数据;DSM2为2017年8月3号DSM数据。根据双时相DSM计算的DDSM,其处理结果如图3所示。图片中颜色越深代表高度差异越大。DDSM随机误差出现在树木、房屋边缘,以及水体表面漏洞。

图4 差异数字表面模型(DDSM)
统计RGB影像及DDSM影像共32项滤波影像中各类样本的均值,方差(D),变异系数(V)和类间差异系数Dw。计算公式为:
D=S2
(2)
(3)
(4)
式(2)~(4)中:D为方差,S为标准差,Dw为类间变异系数,M为均值,M1为第一类均值,M2为第二类均值。
3 农作物分类结果
3.1 农作物分类特征
分析各类样本的均值,方差(D),变异系数(V)和类间差异系数Dw。亚麻与其他作物可见光纹理特征比较结果如表2,图5所示。
亚麻与其他作物DDSM滤波特征比较结果如表3,图6所示。
如表2、表3所示,各项特征的变异系数和相对差异有很大差异,在纹理滤波中,亚麻最大变异系数为0.76,最小变异系数为0.10,亚麻与大豆类间差异系数最大为930.12%,
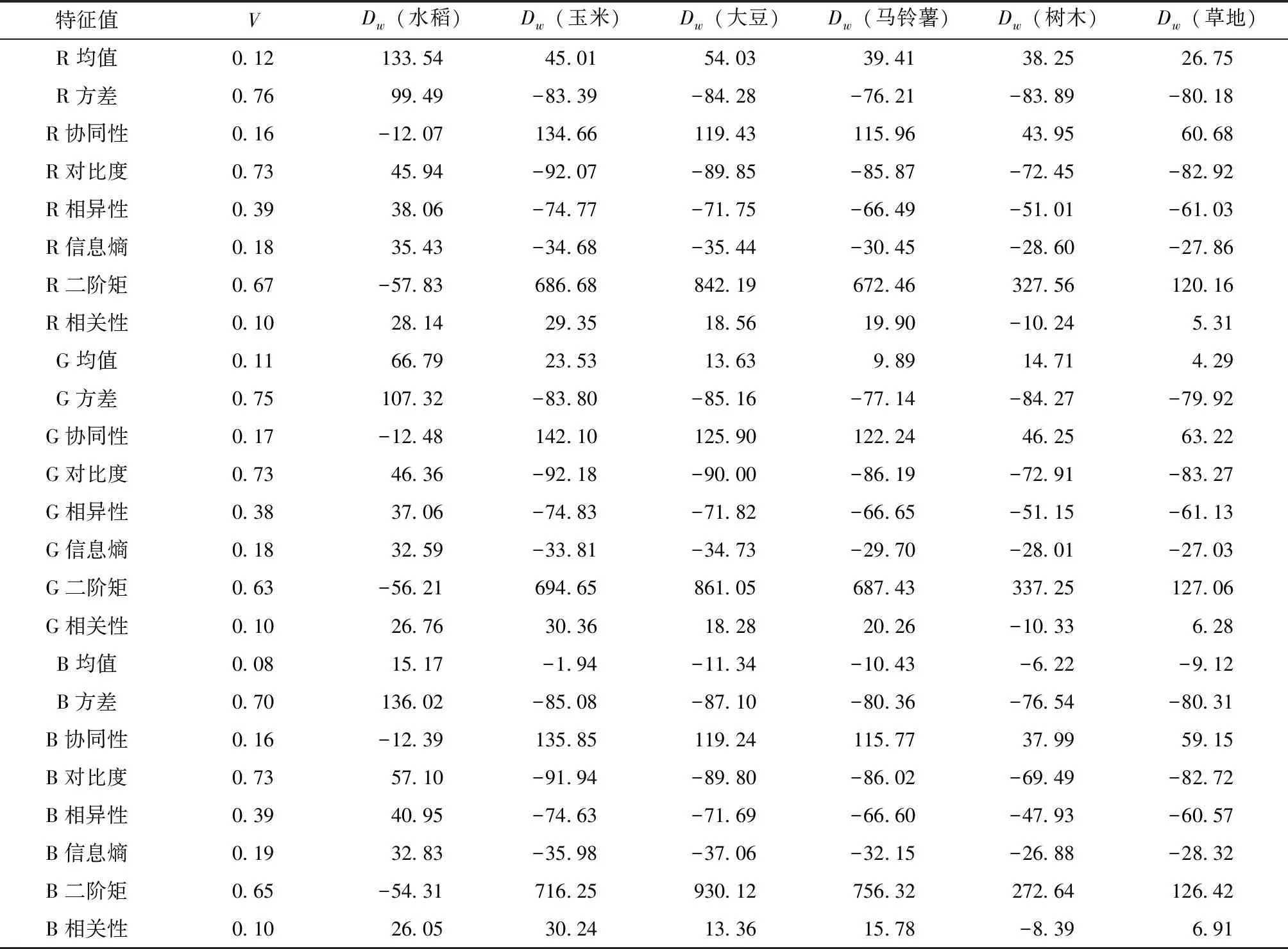
表2 亚麻与其他作物可见光纹理特征比较 %
与建筑类间差异系数最小为0.23%; 在DDSM滤波中,亚麻的特征变异系数最大为2.34,最小为0.01,与树木类间差异系数最大为209.20%,最小为-0.89%。部分滤波特征变异系数较大或类间差异系数较小,并非所有滤波特征都能增强农作物之间的差异。
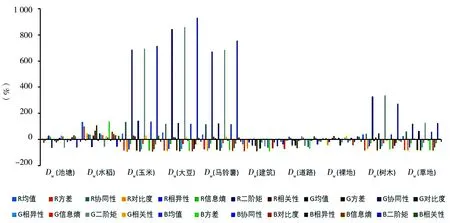
图5 亚麻与其他作物可见光纹理特征比较

表3 亚麻与其他作物DDSM滤波特征比较 %
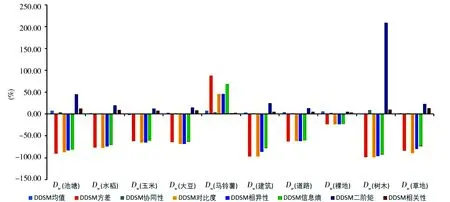
图6 亚麻与其他作物DDSM滤波特征比较
区分不同作物的特征存在交叉,适用于分类的特征需要具有较小的变异系数和较大的类间差异系数。变异系数反应的是离散程度,变异系数越小,越能根据该特征区分该类地物。类间差异系数反应两种地物在该特征上的差异,差异越大越能区分两种地物。如图5所示,以亚麻为例,RGB影像的二阶矩纹理滤波变异系数较小,与其他作物类间差异系数较大。其中相比红波段、蓝波段二阶矩滤波特征,亚麻的绿波段二阶矩与其他作物类间差异系数较大并且变异系数较小,能够较好区分11类不同类型地物,可作为有效特征。
如图6所示,作物在同一时期高度不同,DDSM可以作为高度特征参加分类。因作物的株型不同,作物表层波动情况表现为DDSM方差滤波特征和DDSM对比度滤波特征。
因此,该文分为3类组合特征:
①直接使用红波段(R)、绿波段(G)、蓝波段(B)特征进行分类;
②将作物的可见光光谱信息和纹理特征进行组合,即使用红波段(R)、绿波段(G)、蓝波段(B)和绿波段(G)二阶矩滤波为组合特征进行SVM分类;
③将作物的可见光光谱、纹理及高度特征进行组合,即使用红波段(R)、绿波段(G)、蓝波段(B)、绿波段(G)二阶矩滤波和DDSM方差、DDSM对比度滤波特征进行分类。
3.2 实验结果
基于以上特征组合,对2017年8月无人机影像进行分类,并采用总分类精度和Kappa系数两项指标评价分类结果。上述3种组合的分类结果及统计数据见图7、表4。

图7 基于特征组合的分类
表4 不同特征组合的分类精度及Kappa

特征精度KappaRGB76.000.73RGB、G二阶矩82.890.81RGB、DDSM86.550.85RGB、DDSM、G二阶矩、DDSM方差、DDSM对比度91.900.90
首先,基于可见光RGB波段的支持向量机分类的分类精度为76.00%,kappa系数为0.73,其中马铃薯未能分出,裸地、水稻错分较少,而马铃薯、玉米、树木、草地错分较多,其中马铃薯错分为玉米和树木。其次,在添加绿波段二阶矩滤波特征后精度分类精度为82.89%,Kappa为0.81,总体精度提升,玉米、树木、水体分类中椒盐现象减少,能区分出马铃薯,但仍存在马铃薯和大豆存在错分情况; 再次,由RGB添加DDSM形成RGB-DDSM的 4维特征分类精度为86.55%,Kappa为0.85,其中玉米和树木的区分效果明显提升,地块边界更明显,各类地块内椒盐现象减少,并减少了马铃薯的错分; 最后,在RGB-DDSM波段基础上添加绿波段的二阶矩滤波特征和DDSM方差、对比度滤波特征后,分类精度为91.90%,Kappa系数为0.90,玉米、亚麻、大豆、水稻地块边界区分明显,玉米、大豆内噪点现象减少,草地及树木因阴影导致的错分减少。尽管在添加绿色波段二阶矩滤波、DDSM及DDSM方差和对比度后总体分类精度最高,但是分类时把部分树的边缘错分为了建筑。
4 结论与讨论
在该研究中,采用无人机搭载数码相机以获取研究区域的RGB图像,与侧重于从高分辨率RGB图像中提取纹理特征的分类方法所不同,该研究中利用两个不同时期作物的DSM数据,生成差异数字表面模型DDSM,突出作物生长差异特征,并创新性地将该特征引入农作物分类中。进一步地,该研究对RGB及DDSM数据进行滤波,详细分析并提取了农作物在光谱及空间维度(特别是作物高度)上的联合特征,采用SVM分类模型用于农作物分类。实验结果表明,相比于仅采用光谱特征,在采用光谱、纹理、高度特征等多维特征组合时,农作物的分类总体精度从76.00%提高到91.90%,Kappa系数由0.73提高到0.90。特别是在加入高度差这一空间特征时,整体分类精度得到显著提高,证实了作物高程特征对提高农作物分类精度的有效性。
通过实验结果发现,作物高程特征在农作物分类中的主要贡献如下。
(1)除了提高整体分类准确性外,各类分类结果中椒盐现象减少;
(2)当引入高度特征时,在RGB影像中难以分离的类,例如树木,草地和玉米分类精度提升;
(3)借助高度特征,RGB图像中的由阴影引起的错分减少。
尽管采用该文所提出的方法取得了较高的分类精度,但仍存在以下几个问题。例如,在该文的实验结果中,在树的边缘误分类现象较明显。通过分析发现,在图像处理过程中生成地物数字表面模型时,通常在物体的边缘即高差发生显著变化的区域,所生成的高度值的误差显著增加,因而导致了误分类现象。因此,如何提高地物数字表面模型数据的质量是今后需要进行进一步的研究的课题。同时,在该研究中仅使用了可见光相机,所获取的作物特征有限,在今后的研究中将进一步尝试与其他类型的传感器相结合,如低成本多光谱传感器,增加光谱维度上的特征,以进一步提高农作物的分类精度。
