成都INDRA自动化系统4D轨迹与管制权限更新机制研究
2019-09-18张翀阮敏
张翀 阮敏

摘 要:2019年2月以来成都英德拉自动化系统多次出现个别航迹4D航迹更新及管制扇区权限异常。针对此异常现象,通过自动化系统回放,4D轨迹解析结果前后对比以及自动化系统处理特性分析,对疑似异常现象进行了解释,并对INDRA系统4D轨迹及管制扇区权限更新机制进行了研究,为今后相似问题处理或扇区划设等工作提供了有指导价值的材料。
关键词:INDRA;4D轨迹;管制扇区;管制权限
中图分类号:V355 文献标识码:A 文章编号:1671-2064(2019)14-0011-02
0 引言
2019年2月以来,成都区域管制中心多次反映英德拉自动化系统(以下简称INDRA系统)出现航迹4D轨迹未按照预期更新导致航迹的后续管制席位发生管制权限提示错误的异常现象。以2019年2月14日为例,航班QDA9879从成都区域北扇进入,预计飞越扇区依次为AC16、AC09、AC11L、AC17……在AC09至AC11L存在管制移交过程。正常情况下,航班在AC16、AC09扇区按管制要求飞行时,对具有AC11L及AC17指挥权限的管制员应显示为预管制状态,提示管制员该航班即将进入本席位管制扇区。但在本案例中,其4D轨迹更新并未按照预期演变,反而变为黑色不关注状态,即系统认为该航迹下个扇区非本席位管辖,不予提示。
成都区域目前日均起降架次已超900次,日均飞越架次超过2000次,空管保障压力巨大,自动化系统如不能按照预期向管制员提供航迹预进入提示功能,可能影响管制员进行冲突预判;扇区间管制权限如不能按预期完成移交,则会明显增大管制协调工作量。以上风险源均不可接受,为此,技术保障部门针对案例进行了详细分析,从现象解释到实验验证,最后提出解决建议。
1 现象分析
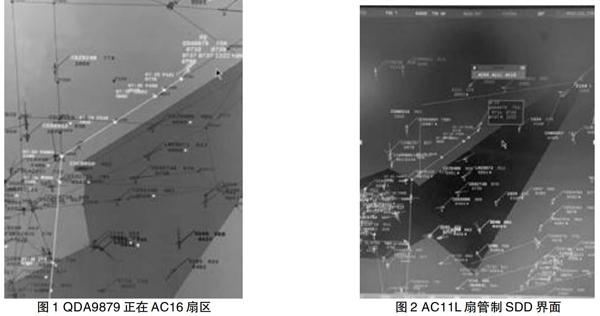
在对管制申报记录进行汇总后,选取了2月14日案列进行回放,对航迹从出现到发生异常再到恢复的全过程进行了场景还原。如图1所示,UTC时间07:22,航迹QDA9879正位于成都AC16扇区,该扇区管制员拥有AC16、AC09、AC11H指挥权限,航迹标牌显示为全绿色。管制员输入移交高度7800米,按照计划航线将于PANKO移交AC11L扇区。但同一时刻,AC11L扇管制员的SDD上(如图2所示)该航迹标牌显示为黑色不关注状态,管制员没有如期收到预进入提示。观察发现,航迹4D轨迹解析正常,后续航路点依次为P191、P490、LUBDI、P248、PANKO、P489、ZYG……,但过点高度并未按管制员设想保持在7800米,而是逐渐上升,在PANKO预计达到11000米,随后在ZYG又下降至7800米。按照以上过点高度推测:航迹在过PANKO时,将直接进入AC11H扇空域且保持11000米高度,直到接近ZYG航路点时,才开始下降并飞越ZYG。是否有可能系统根据此4D轨迹预测结果,不认为航迹将进入AC11L扇?通过Indra系统工具解析该航迹实时4D轨迹计算属性,如表1所示:系统推测航迹依次飞越扇区AEXA、AC16、AC09、AC11H、AC11L、AC17……但在AC11L扇区飞行时间仅为23秒,低于有效判断阈值,推测得到证实。那么该航迹为什么在管制正常操作环境下,没有按照预想的状态演变?存在高低扇划设的空域,航迹垂直穿越扇区边界时系统又如何判断?带着以上疑问,利用成都Indra测试验证平台,进行了推测和实验。
2 INDRA 4D轨迹更新机制研究
INDRA系统中,管制扇区基本单元为basic sector,由其组成的与管制实际指挥空域形状一致的是logic sector,在此之上,由管制主任席根据流量及管制负荷进行分合扇后,将1个或多个logic sector划分至某固定OPS,管制员对其OPS所含logic sector具有管制权而指定XFL操作将影响该航迹离开其OPS时过扇区边界高度。在本例中管制员修改XFL,试图让航迹在过PANKO前下降至7800米,但实际执行结果影响的是过ZYG高度(见图3)。这时,如要立即使4D轨迹下降至预期高度,可选的管制操作是修改航迹ECL,则航迹剩余航路检查点过点高度将立即全部变为ECL高度。
另一个问题与Indra 4D轨迹高度剖面相关,Indra自动化系统轨迹推测采用的是基于航空器性能模型及航路模型初始建模,使用机组意图及大气环境数据参与调整的模拟计算方法,其航空器性能使用Eurocontrol Experimental Center制作的BADA航空器性能数据库。初始4D轨迹的高度剖面采用最佳燃油经济性模型,总是按尽早加入巡航高度,最迟离开巡航高度的方式进行4D轨迹预测。这对于具有高低扇划分的管制空域,可能面临的问题是:系统推测的穿越高低扇垂直边界的轨迹与管制员设想不一致。如图4所示,以成都区域为例,相邻的AC11H、AC11L、AC18、AC17四个扇区分别为两组高低扇,且垂直边界高度不同。在未指定ECL的条件下,系统将使用FPL里的初始巡航高度进行4D轨迹计算,并尽可能晚的考虑下降高度,导致AC11H移交AC11L的推测时刻偏晚。除此之外,对于低扇的最高可用高度层,系统采取扇区垂直边界高度(含)下取整1000英尺的方式进行实际计算,在本例中,虽然11扇高低边界高度为267HF,但系统认定的AC11L扇最高可用高度层为260HF,导致4D轨迹进入时刻进一步推迟。通过验证平台进一步实验发现,如果指定XFL等于267HF,则系统将判定航迹不进入AC11L扇区,管制权限判定将变为AC11H直接移交AC17扇区。相似问题,在成都区域与贵阳区域边界也会发生,导致个别航迹未按管制预期从AC17通过AIDC移交贵阳,而是移交给了AC18扇区,只不过4D轨迹高度剖面变为从低扇穿越边界上高扇。
3 结语
2019年2月以来,成都区域管制中心多次反映英德拉自动化系统(以下简称INDRA系统)出现航迹4D轨迹未按照预期更新导致航迹的后续管制席位发生管制权限提示错误的异常现象。主要原因来自以下几个方面:管制分合扇后,OPS管制扇区变化导致XFL生效位置变化;Indra 4D轨迹计算模型与扇区划分存在微妙关系,导致系统对航迹与管制员预期存在差异。此种现象为个别航迹出现的偶发现象,不能定义为系统故障或问题,但通过分析和实验所掌握的INDRA自动化系统4D轨迹与管制权限更新机制可以为管制指令、扇区划分,管制移交操及航路航线程序设计等提供更准确的系统理论支撑。
参考文献
[1] Eurocontrol Standard Document for Surveillance Data Exchange Part 2a: Category 001 Transmission of Monoradar Data Target Reports, Edition 1.2[S].2011,9.
[2] Revised Chengdu Automation System Subsystem Specification, INDRA, Edit/Rev: A/0[S].2012,03:13.
[3] 李小鵬.INDRA空管自动化系统技术操作手册[Z].民航西南空管局,2013.
