三维激光扫描仪在红色古建筑建模的应用——以龙江书院为例
2019-09-18付青
付 青
三维激光扫描仪在红色古建筑建模的应用——以龙江书院为例
付 青1,2,3
(1. 井冈山大学电子与信息工程学院,江西吉安 343009; 2. 流域生态与地理环境监测国家测绘地理信息局重点实验室,江西,吉安 343009;3. 同济大学测绘与地理信息学院,上海 200092)
红色古建筑因其形状独特、结构复杂,传统的测绘方法难以精确还原其真实空间三维场景。三维激光扫描仪能完整的获取红色古建筑的整体结构和细节形态特征,快速、自动、准确地获取目标物体表面的点云信息,具有传统测量无法比拟的优势。运用天宝 TX8三维激光扫描仪,以井冈山市的龙江书院为研究对象,阐述红色古建筑的外部和内部点云数据采集和处理,提出一种分步的古建筑精细模型的三维重建方法,探讨了三维激光扫描技术在古建筑建模中的应用。结果表明:三维激光扫描技术能够极大节省工程时间,提高测量精度,降低数据处理的复杂程度,能够快速、精确的获得红色古建筑的三维模型,为红色古建筑三维重建提供借鉴和参考。
三维激光扫描仪;红色古建筑;三维模型;龙江书院
传统红色古建筑测量方法存在作业人员多、后期内业费时、费力等不足,特别是针对复杂异形红色古建筑时已很难满足测量精度的要求[1]。传统的古建筑测量方法是技术人员通过对二维图纸或文献进行手工量测后,将古建筑的信息绘制记录成册[2]。该方法费力、耗时、精度较低,不能直观表达古建筑的信息,并且在测量过程中会造成古建筑的“二次伤害”[3]。三维激光扫描技术能够快速、精确地获取古建筑的表面点云信息,是一种非接触式测量方法[4],能够准确采集、记录、管理古建筑的各类信息,对其进行数字化过程中可有效保护古建筑,已成为古建筑数字化的一种极具发展前景的技术[5]。三维激光扫描技术能够快速、准确地采集古建筑表面的点云数据[6],在不接触古建筑表面的前提下自动、连续、快速获取其表面密集的点云数据[7],并将外业采集的点云数据导入计算机,通过专业的建模软件先将点云数据提取生成古建筑线划图,然后使用3D Maxs、Maya等建模软件生成三维模型,可以有效克服传统古建筑测量的局限性[8-9]。
三维激光扫描仪可以实现对大型异形红色古建筑的表面进行非接触式扫描作业,并利用高清数码相机采集其对应的精细纹理信息,然后利用专业的建模软件生成精细的三维模型,最终可用于后期文物归档,管理,修葺等工作[10-11]。本文采用天宝TX8三维激光扫描仪,以井冈山市的龙江书院为例,采用 Trimble Realworks点云数据处理软件,研究红色古建筑点云数据的外业数据采集与内业模型生成的方法,并应用专业的建模软件将点云数据生成精细的三维模型。
1 点云数据处理
1.1 天宝TX8三维激光扫描仪
天宝TX8三维激光扫描仪具有扫描速度快、测量距离远等优点,从而大大地减少野外红色古建筑点云数据获取所需的时间。其高效的扫描速度能够有效地减少每次扫描目标物体所需的时间,而其较远距离测量的能力则可以减少整个扫描任务所需的测量次数,其具体扫描参数见表1所示[12]。地面三维激光扫描仪主要是采用像栅格编码器角度自动高精度识别、CCD传感器技术、HDR等技术。

表1 天宝TX8三维激光扫描仪系统参数
1.2 数据获取与预处理
数据获取主要包括采集点云数据及其相应的纹理信息等,点云数据预处理主要包括点云数据的去噪、配准、重采样等步骤,最后需要验证点云数据的精度。
1.2.1 数据获取
在进行三维激光扫描作业时,不但需要采集目标物体的表面点云数据,同时还要收集其它数据,如高清数码影像、全景摄影等。采集目标物体的纹理信息需要保证目标对象的完整性,还要强调其细节的准确性,当采集某对象的相同类型的纹理数据时应尽量在时间间隔较小内完成,应尽量采集含有较少其它杂物的纹理信息。当某对象的同一纹理面积过大时,采用“先整体后局部”的方法。采集目标物体表面纹理信息时,应采用正视拍摄与多角度拍摄相结合的方法,以确保每个对象纹理特征的完整性。针对地面或墙面铺装等纹理,其拍摄面积不能太小,防止进行纹理拼接时出现较多的重复。
点云数据配准主要包括两种方法:带标靶和不带标靶控制的点云配准方法。带标靶控制的配准方法是通过标靶获取相邻点云之间的公共点,并以此作为控制信息进行配准转换参数的求解;不带标靶控制的配准方法是通过在相邻点云之间选择特征明显的同名点,采用“先粗后精”的配准方法。点云粗配准方法是对同名点特征进行变换参数求解,得到精度一般的点云配准变换参数;点云精配准方法则是在粗配准的基础上,进一步提高配准精度,最后获取较好的配准变换参数。
标靶的布设方法主要可以分为两种:第一种方法需要保证每个相邻测站之间至少布设3个公共标靶,将可识别的标靶作为相邻点云数据的公共控制点。第二种方法只需设置2个公共的标靶,但要求每个测站需要整平三维激光扫描仪,以保证在垂直方向上每个扫描站点上点云数据都是平行[13]。
1.2.2 点云数据去噪
点云去噪是点云配准后的最为重要的步骤,是进一步优化点云质量的有效途径。三维激光扫描仪进行外业测量时,诸如行人、树木和车辆等无关地物都会被其采集,故增加整体数据冗余性,还会影响后期目标物体的特征识别与提取。通过人工判读的方式删除噪声点云,以单个古建筑表面为单位,将点云分割成不同的点云区,分别进行点云去噪处理。利用 Trimble Realworks 软件,采用人工交互式方法,不断调整不同视角,进一步剔除粗差与噪点数据,实现点云数据质量的提升。
1.2.3 点云数据重采样
由于外业采集点云数据时通常采用分站式扫描方法,相邻测站之间会存在部分的重叠区,在进行点云数据拼接时,会造成一定的数据冗余。扫描距离的不同也会对点云数据量造成较大的影响,随着扫描距离的不算增大,点云数据量也逐渐减小,故在不影响点云建模精度的条件下,对点云数据设置某一阈值进行重采样显得尤为必要。点云重采样不但可以有效地简化点云数据量,而且能较好的保留有用的点云特征信息。在Trimble Realworks 软件中,采用“取样”菜单操作命令。
2 红色古建筑三维建模
红色古建筑的三维模型重建主要分为建筑本身及其附属周边环境模型。根据古建筑和附属环境的复杂性和覆盖范围,对古建筑的重要性和精度要求进行了分类和建模。具体分类如下:
(1)精细显示模型:古建筑的内外结构(包含柱、角、梁等部件)及其纹理;
(2)一般精细的模型:门前桥、地面的形状和纹理;
(3)粗略环境模型:围栏、公告牌等。
基于数学模型和曲面构造理论,Realworks提供了丰富的点云处理、曲线提取和编辑功能。Maya软件操作简单,功能强大,可以快速方便地构建、显示和编辑三维模型。Realworks和Maya建模软件分别对红色古建筑的内、外表面及其附属场景组件(尖顶、围栏等)进行建模。三维激光扫描仪进行红色古建筑建模内外业一体化作业流程如图1所示:
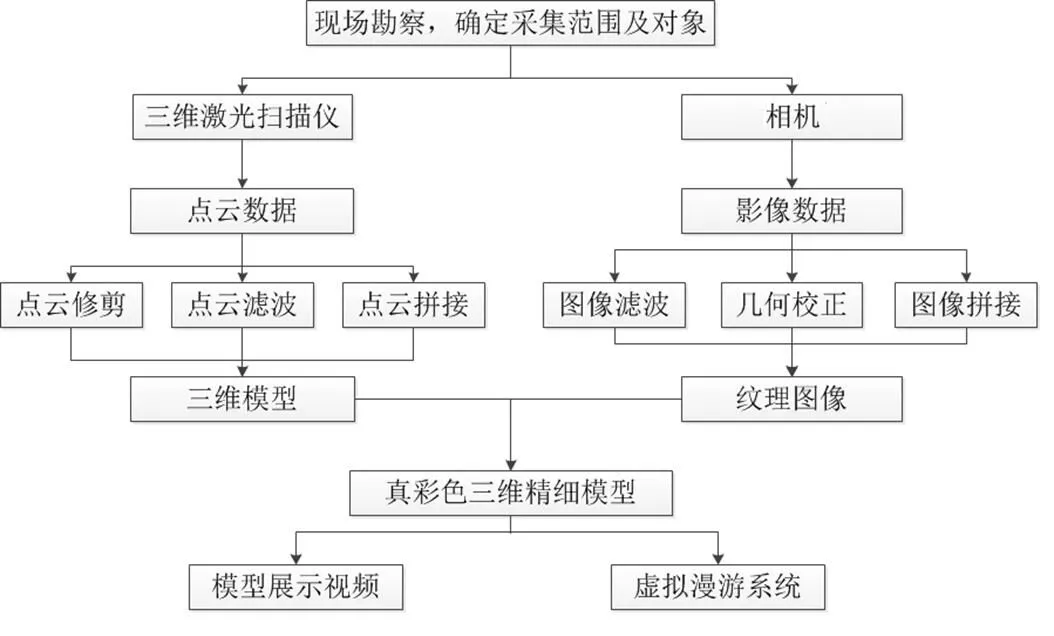
图 1 三维激光扫描仪内外业一体化作业流程
2.1 轮廓线提取
红色古建筑轮廓线的提取一般采用AutoCAD软件,也可以采用专业的点云处理软件或三维建模软件。本文采用 Trimble Realworks 软件下的“快速轮廓曲线工具”的命令,选择最佳横截面菜单工具,可以得到建筑物的平面位置。采用软件中的“测量工具”命令实现提取柱、梁、枋等构件的长度。采用分层切片技术对局部缺失的点云数据进行拟合,并对应现场拍摄的高清数字照片提取缺失的点特征和线特征。
2.2 基于几何特征构建三维模型
基于几何模型进行三维模型的构建不但需要提取点云数据中的特征点、线、面,然后根据这些特征利用如3d Max、Maya等建模软件进行建模。并且还可以使用专业的建模插件直接拟合生成对象的各个组成部分。
在Trimble Realworks 进行红色古建筑三维建模主要包括以下几步:1)点云数据重采样。原始点云数据量巨大,存在较大的冗余性,需要对其进行删减,进而有效地减少模型化的生成时间。2)三角网生成。三维模型的重建是将重采样后点云数据进行自动、快速、精确地生成三角网格。3)漏洞修补。外业采集点云数据时受各种噪声的影响,造成扫描的红色古建筑表面点云信息存在一定的漏洞,最终导致三维建模后的目标物体表面出现黑洞现象。故需要采取一定的人工编辑,如删除不必要的三角网格、修补漏洞等。
2.3 纹理贴图
生成红色古建筑的“白模”后,再对其进行纹理贴图处理可以得到更具有真实感的三维模型。通过对红色古建筑的“白模”进行表面贴图处理,可以很好地表现目标物体的细节信息,还可以对模型添加反射、折射等多种效果,使得三维模型具有更加精细和真实感。故在外业扫描处理作业过程中需要对红色古建筑的细节信息用数码相机进行拍摄记录。由于外业采集的图像不是完全正射图,需要利用专业的图像处理软件,如Photoshop,对纹理图片进行剪切、纠正、变换等操作,使用画笔、印章等工具进行纹理图像中的无关紧要杂点的去除;采用对比度、亮度、颜色替换、色彩平和等工具进行纹理图像色调的统一。
3 应用实例
本文以井冈山市的龙江书院为例,其位于江西省井冈山市龙市镇,始建于公元1840年(清道光二十年),是由原宁冈、酃县、茶陵三县的客籍绅民捐款集资修建的,是当年三县客籍人的最高学府[14]。然后简要介绍天宝TX8三维激光扫描仪在红色古建筑建模中的应用。
3.1 站点设置与扫描
首先对研究测区现场环境进行详细的勘察,科学地、合理地布置扫描测站不仅可以减少站点总数,而且可以获取详细的古建筑表面数据。架设好三维激光扫描仪后需要进行仪器参数设置,在扫描作业过程中,点云数据量并不是越多越好,在满足项目成果精度的情况下,以最优的扫描参数获取点云数据可以有效的提高整体的工作效率。
3.2 点云数据配准
在天宝RealWorks软件中将导入原始外业采集的扫描点云数据,如图2所示:

图 2 原始点云数据
由于每个测站都采用测站坐标系,需要对其进行坐标统一处理,故采用无目标站点整体拼接方法。对于大范围复杂情况下的扫描作业往往需要几十站甚至上百站点,故点云配准精度直接影响后期三维模型重建。本文对外业采集的龙江书院点云数据进行实验,实现测站拼接,其效果如图3所示,点云数据的配准精度为1.8 mm。

(a) 点云配准全图

(b) 点云配准细节
图3 龙江书院点云配准图
Fig.3 The point cloud registration of Lingjiang academy
3.3 红色古建筑三维模型重建
3.3.1 古建筑内部表面模型构建
由于古建筑内部重建的复杂性、不规则性和点云数据量大,RealWorks软件对点云数据进行去噪和简化,生成了不规则三角形网模型(TIN)。根据古建筑内部结构和规模要求,本文以20 mm间距为步距,建立了TIN模型。由于数据采集中一些客观条件的限制,容易出现漏洞,需要填补漏洞。填充漏洞后的TIN模型需要平滑和锐化处理,使模型更逼真和美观。
3.3.2 古建筑附属周边环境重建
红色古建筑的三维场景以其自身内外几何模型为主,其周边环境要素如围墙、地面、公告牌等,能更真实、完整地还原古建筑的现状。由于外部场景的非主体元素,使得模型的信息和准确性要求并不高,因此利用Maya软件可以简单、快速地生成相应的三维模型。通过对点云数据的精确尺寸测量,可以得到其相应的实际高度。对于较为规则模型,如楼梯和门洞,可以在RealWorks软件中使用测量工具来测量点云模型的宽度、高度和半径等信息。根据上述量测参数,可以使用Maya软件中常用的绘图工具进行建模。建模中一些复杂的模型,如梁、背等是不规则的,需要根据相应的点云数据独立导入到Maya软件中进行建模。
3.3.3 模型整合
在建立各部分的实体模型后,将处理后的纹理信息映射到模型表面,生成初始纹理模型,然后渲染纹理模型。将所有已建立的古建筑模型转化为不规则三角形网格,导入Maya 软件,并进行整合。在点云模型的基础上,将各种模型通过空间变换到相应的位置,最后生成整合后的模型结果。经过上述步骤处理后,添加纹理图像后使得红色古建筑三维模型更加自然、精细,龙江书院的精细三维模型如图4所示。

(a) 龙江书院三维模型全景

(b) 龙江书院三维模型细节
图4 龙江书院精细三维模型图
Fig.4 The fine three-dimensional model of Longjiang academy
4 结语
随着三维激光扫描仪技术日益成熟,作为测绘行业发展的热点方向之一,其市场发展需求巨大。三维激光扫描仪采集外业点云数据具有速度快、精度高等优势,有效地解决传统古建筑测量无法解决的问题。本文运用天宝 TX8三维激光扫描仪,采用专业的点云处理和三维建模软件,采用一种分步的古建筑精细模型的三维重建方法,实现快速、准确红色古建筑三维模型的建立,初步探索三维激光扫描技术在数字红色古建筑中的应用。
[1] 王峰,林鸿,李长辉. 地面三维激光扫描技术在城市测绘中的应用[J]. 测绘通报, 2012(5):47-49.
[2] 刘昊. 基于点云的古建筑信息模型(BIM)建立研究[D]. 北京:北京建筑大学,2014.
[3] 索俊锋,刘勇,蒋志勇,等. 基于三维激光扫描点云数据的古建筑建模[J]. 测绘科学,2017,42(3):179-185.
[4] 范张伟,邢昱. 基于数字化技术的古建筑保护研究[J].北京测绘,2010,35(3):18-21.
[5] 王琳琳.三维激光扫描技术在古建筑测绘中的应用与问题分析[D]. 长春:长春工程学院,2015.
[6] 张庚涛. 地面三维激光扫描技术在建筑立面图制作中的应用[J]. 测绘技术装备, 2013, 15(4): 82-84.
[7] 李德江,董明清,孙凤弢. 三维激光扫描仪在城市外立面采集成图中的应用[J]. 测绘与空间地理信息, 2014(9):29-31.
[8] 吕宝雄. 基于三维激光扫描的建筑立面测绘关键技术[J]. 西北水电, 2015, (5): 30-32.
[9] 张平,黄承亮,朱清海,等. 基于三维激光扫描技术的异型建筑物建筑面积竣工测量[J]. 测绘与空间地理信息, 2014(5):222-224.
[10] 李超. 三维激光扫描技术在城市特殊结构测量中的应用[J]. 测绘通报, 2014, (1): 71-73.
[11] 刘盈. 浅谈地面三维激光扫描技术在市政工程测量中的应用[J]. 北京测绘, 2008, (1): 67-68.
[12] 徐凯,郝红美,郭亚兴. 基于三维激光扫描仪的三维文物模型的建立[J]. 北京测绘, 2014, (4): 120-122.
[13] 朱庆伟,马宇佼. 基于三维激光扫描仪的建筑物建模应用研究[J].地理与地理信息科学,2014,30(6): 31-35.
[14] 百度百科.龙江书院[EB/OL]. https://baike.baidu.com/ item/ 龙江书院, 2018-06.
Application of 3D laser scanner in red ancient architecture modeling: a case study of Longjiang academy
FU Qing1,2,3
(1. School of electronics and information engineering, Jinggangshan University, Ji’an, Jiangxi 343009, China; 2. Key laboratory of watershed ecology and geographical environment monitoring, NASG, Ji’an, Jingxi 343009,China; 3. College of surveying and Geo-informatics, Tongji University, Shanghai 200092, China)
Duo to red ancient architecture’s unique shape and complex structure, the traditional surveying and mapping method is difficult to accurately restore its real space three-dimensional scene.The 3D laser scanner can get the whole structure and the detailed shape characteristic of the red ancient building, get the point cloud information of the object surface quickly, automatically and accurately. In this paper, using Trimble TX8 3D laser scanner, taking Longjiang academy in Jinggangshan as the research object, the data acquisition and processing of the facade of the exterior and interior of red ancient buildingsare analyzed, and a step-by-step method for three-dimensional reconstruction of fine models of ancient buildings is proposed. The results show that the 3D laser scanning technology can greatly save the engineering time, improve the measurement accuracy and reduce the complexity of data processing, which provides reference for three-dimensional reconstruction of red ancient buildings.
3D laser scanner; red ancient architecture; 3D model; Longjiang academy
文献标识码:A DOI:10.3969/j.issn.1674-8085.2019.05.010
1674-8085(2019)05-0052-05
2019-03-09;
2019-05-27
江西省教育厅科技计划项目(GJJ170651),井冈山大学自然科学科研项目(JZ1703)
付 青(1990-),男,江西抚州人,实验师,博士生,主要从事红色古建筑三维模型重建与数字化保护等研究(E-Mail:fvqing@163.com).
