无人驾驶速度控制算法研究
2019-09-17李志刚吴俞憬
文/李志刚 吴俞憬
车行驶速度实时控制系统的精度以及速度直接决定着无人驾驶汽车的性能好坏。现在速度控制算法通常是由常规PID控制器实现,它具有原理简单,使用方便等优点,但是也有调整时间长、超调量大等缺点,这些缺点使其成为限制汽车性能的瓶颈。研究如何控制自主车辆的速度是基础且十分重要的。速度控制器的快速性和稳定性直接影响智能驾驶系统和多车协同控制的效果,一种控制自主车辆速度的方法是根据车辆和环境的信息以速度控制追踪器计算出所需的速度,然后根据所需的速度和车辆状态控制电动机。由于车辆的强非线性、复杂的驾驶环境以及不同车辆输出特性的变化,速度控制器的性能必须更优越。传统的控制方法是比例积分微分(PID)算法。一般固定参数PID控制器虽具有较高的鲁棒性与简洁的结构,然而对于复杂工况的适应性较差。模糊PID控制器能够针对参数进行高效调节,然而必需的模糊规则应当得到构建。以有效处理这些问题为目的,本论文设计了能够提高参数的、稳定性与快速性均较强的单神经元间接结构PID控制器。
1 无人驾驶速度控制系统建立
1.1 无人驾驶速度控制系统工作原理
无人驾驶速度控制系统可有效调节汽车速度,内在机理如下:
(1)以车辆其余部件为依据,得出实时目标速度;
(2)将实际车速进行测定,得到和目标速度间的差;
(3)根据所得结果针对汽车牵引力进行调节,从而达成目标速度。
无人驾驶汽车在追踪预订速度时,通常会通过制动与油门综合控制法。以实际速度与目标速度差为依据,结合相应不同算法,制动控制器得出制动控制量,油门控制器得出油门控制量。切换规则则以上述参数为依据,进行制动控制与油门控制的选择。没有被选择的控制会处于初始点。通过该PID控制方法,能够满足平坦路面的速度跟踪,然而若路况比较复杂时,会明显增大跟踪效果误差。
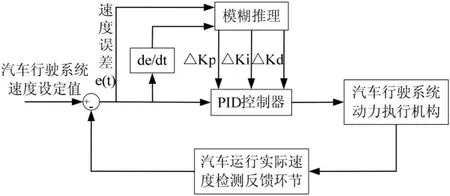
图1:速度控制系统设计
1.2 模糊PID控制器和汽车动力执行机构
1.2.1 模糊PID控制器
模糊PID控制器的功效在于获取到所检测目标速度和实际速度之差并实现向动力机构牵引力的转换,从而达到目标速度。和以往的PID控制比较起来,其特征在于可趋近于人工驾驶,制动踏板时都比较平缓,无论是减速还是加速都比较平稳。
作为控制方式的一种,将操作人员控制知识与经验为出发点,模糊控制以语言型控制规则为基础,在进行设计时是没有必要针对被控对象数学模型进行准确构建的,所以人们能够更容易的理解其控制策略与机理,同时可应用性与便捷性强。
模糊控制系统会呈现出显著的鲁棒性,因此控制效果受到来自参数变化与干扰的影响程度会明显降低,在控制纯滞后、时变与非线性系统时特别适用。
1.2.2 动力执行机构汽车动力执行机构可通过牵引力实现车辆运行速度的变更。牵引力与汽车运行速度的关系为:
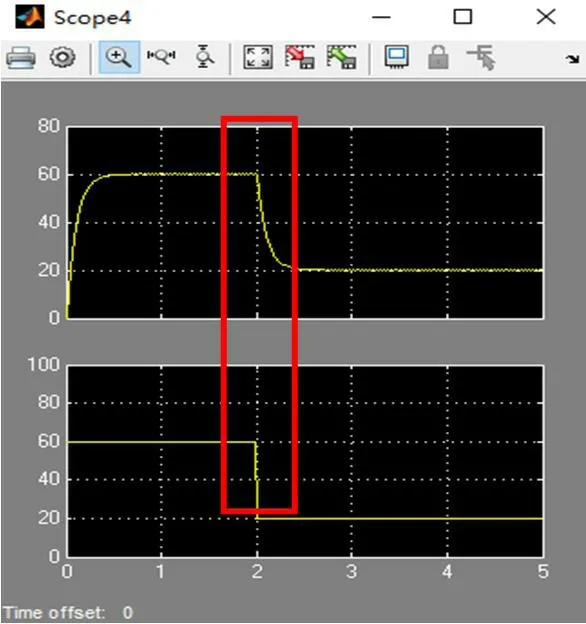
图2:为速度(km/h)从60降速到20仿真曲线图

式子中m为汽车的重量,单位为kg;a单位是m/s2,表示加速度;b 为汽车运行过程中的阻力因子;v单位是m/s,表示实际速度,同时和a之间关系为a=dv/dt。
1.2.3 关键算法
作为二维模糊控制器,模糊控制器有着三输出双输入,U、Ec与E为模糊集,△kd、△ki与△kp为输出量,速度偏差变化率ec与速度偏差e为输入量。通过正大(PB)、正中(PM)、正小(PS)、零(Z0)、负小(NS)、负中(NM)、负大(NB)等模糊状态描述输出论域U、速度偏差变化率ec与速度偏差e。
模糊算法的思想类似于连表查询。我们事先建立好放缩和区间划分规则,比如设定速度偏差E的七个模糊状态区间为(-20,20)七等分,将当前时刻的E和Ec的模糊状态得出后可通过一下三张表进行查询。查询得到的结果就是△kp,△ki,△kd的模糊状态,根据实现设定模糊状态对应的值,即可得到△kp,△ki,△kd。然后与PID控制器中的kp,ki,kd相减即可。速度控制系统设计如图1所示。
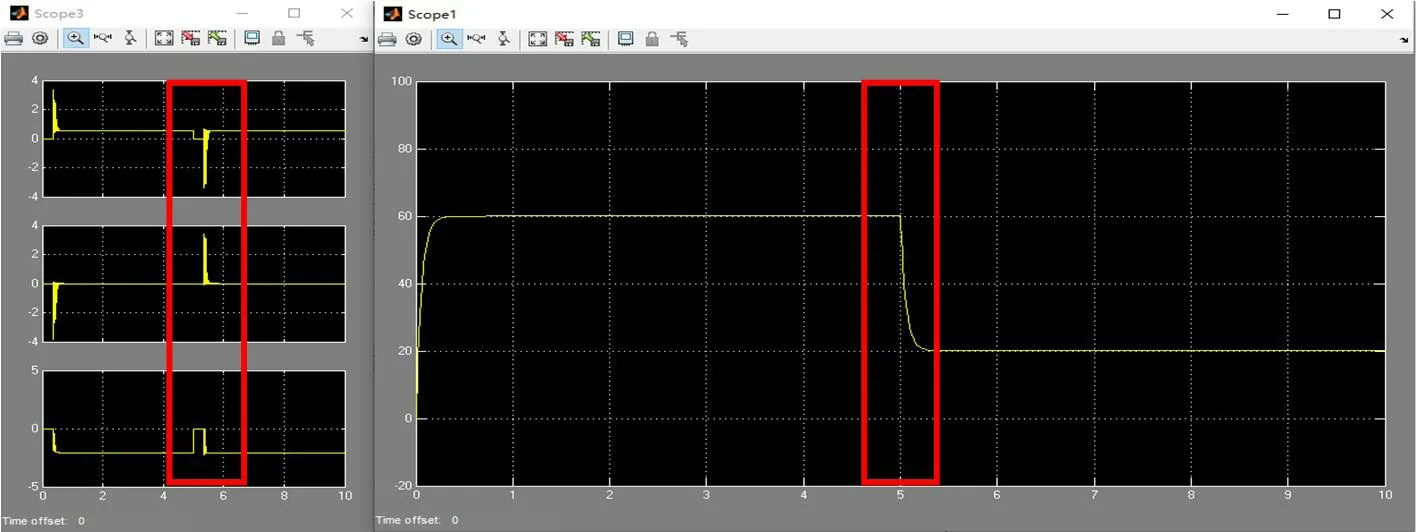
图3:5s反应时间后,从60-20的减速
2 在Matlab中使用simulink进行仿真
搭建一个离散闭环常规PID系统(采样时间为0.02秒)。
PID里的三个参数 Kp,Ki,Kd课通过一些论文的经验调参法来得到。
被控对象是汽车速度通过公式F=ma,a=dv/dt来表述,发动机提供的牵引力F和汽车重力和时间即可得到力输入和速度的时间关系。
用例:设置速度(km/h)从60降速到20常规PID,如图2所示。
看到符合预期值但是性能上仍有上升空间。
FLC输入有两个,一是速度误差E=vi-vr 二是速度变化误差Ec=E/dt
输出是PID的三个参数的调节量。
这五个参数需要模糊化再将其分割进行模糊推理建立规则库要根据模型来对照输入49个规则。
然后将Fuzzy Logic Controller加入到模型中在再次仿真。
如图3所示,从曲线大致走势上看,模糊PID控制与以往PID控制是基本一致的,不过也存在一些差异。若巡航时速是60公里,单一PID控制曲线响应时间是慢于模糊PID控制的,同时其稳定性不如后者,超调量也更大。试验结果证明,通过模糊PID控制,可将响应时间减少,超调量降低,稳定性增强。本次设计通过模糊控制,可将PID控制显著优化。
3 结论
为了实现无人驾驶技术,防止无人驾驶汽车在行驶的过程中出现超调,让无人驾驶技术实现加速、减速、超车、转弯的技术,同时还要考虑偏离程度、向中心线考虑快慢、持续偏离误差等等一系列安全问题,都要基于PID控制才能实现无人驾驶的稳定与安全,使得无人驾驶的自动控制性能较为优异。而模糊PID能使得无人驾驶自动控制性能更加优异,因此本文基于模糊PID的控制从而改变自动控制的算法。
在无人驾驶汽车速度控制系统中运用到模糊PID控制算法,相较于以往PID控制算法,其研究范围涉及到了控制速度,针对在DSP控制器中如何实现PID控制进行了阐述。在实现PID控制时,为了针对PID参数进行整定,选择了稳态边界法。为了提高舒适度,在选择PID算法时结合了加速度控制,并在试验的基础上针对算法有效性进行了确认。结果证实,可有效减少调整时间与超调量, 通过PID控制算法的有效运用可将汽车整体性能显著优化。
