分布式驱动电动汽车行驶状态估计综述*
2019-09-11樊东升李刚
樊东升,李刚
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
前言
分布式驱动电动汽车作为新能源汽车的一种,符合当下节能环保的潮流,可以显著提高汽车的操纵稳定性和主动安全性。必将成为下一代新能源汽车的重要发展趋势[1-2]。在这个信息科技技术大力发展的社会形势下,也深刻影响着汽车科技领域的不断发展与运用,人们生活质量的不断改善,开始逐渐追求更卓越的汽车操纵稳定性和主动安全性。而汽车的操纵稳定性很大程度上取决于汽车的主动安全控制系统。配备了主动安全控制系统的汽车,其操纵稳定性可以显著得到改善,大大降低交通事故的发生率。而车辆的行驶状态如何准确并实时的获取,成为主动安全控制要解决的首要问题[3]。
1 车辆行驶状态估计算法研究现状
在车辆行驶状态参数估计的算法研究中,大多数算法采用卡尔曼滤波的方法进行估计,卡尔曼滤波的优点在于,它可以求解出线性最小均方误差估计。由于测量过程中不可避免有噪声和干扰,所以对系统的最优估计也可认为是滤波过程。在卡尔曼滤波算法中,估算过程分为时间更新和量测更新两个系统,其中对系统噪声和测量噪声均假设为高斯白噪声。
卡尔曼滤波算法可用以下方程进行描述:

式中:A 和B 表示系统参数矩阵;W(k)表示过程激励噪声。H 表示量测变量对状态变量的雅可比矩阵,V(k)分别表示和量测噪声。
卡尔曼滤波时间更新方程:
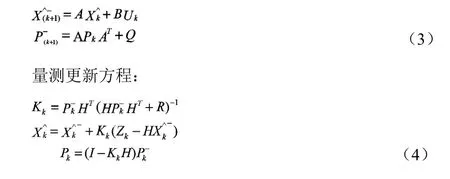
式中:Q,R 分别表示误差协方差矩阵。
1.1 基于扩展卡尔曼(EKF)滤波的车辆行驶状态参数估计算法
扩展卡尔曼滤波(EKF)算法的核心思想,是将系统方程利用泰勒一阶展开法则,求解一阶偏导,将非线性转化为线性进行求解。
文献[4]提出了一种估计轮胎 -路面摩擦系数的有限记忆自适应扩展卡尔曼滤波器(LM-AEKF),通过将扩展卡尔曼滤波器(EKF)与有限存储器滤波器相结合,该算法可以降低旧测量数据对滤波的影响,提高估计精度。引入自适应调节因子来权衡评估误差的协方差矩阵。同时,通过模糊推理动态调整测量的噪声协方差矩阵,准确跟踪系统的破坏状态。文献[5]研究了一种基于扩展卡尔曼滤波器(EKF)的分布式驱动电动汽车状态估计方法。 建立了七自由度闭环车辆仿真平台,包括预测跟随方法的驾驶员模型和“魔术公式”轮胎模型。考虑到高斯测量白噪声,建立了一般的2 输入、1 输出和3 状态估计系统。在双车道变换过程中,应用于四电机驱动的车辆。文献[6]使用扩展卡尔曼滤波(EKF)算法设计估计器。所提出的估计器使用轮胎上的转向角和垂直力作为输入。随后,根据七自由度车辆模型、纵向和横向加速度、转向角、横摆率和车轮速度的测量传感器信号,EKF 算法用于识别不可测量的状态变量,例如横向速度,车辆侧滑角和侧向轮胎力,实现对状态变量的准确估计。
扩展卡尔曼滤波(EKF)算法,对于高度非线性滤波问题,可能使状态估计结果发散,并且计算非常复杂的雅可比矩阵(有时矩阵可能无解)会严重影响状态估计的实时性。对于算法估计的结果精度较低,稳定性也很差。
1.2 基于容积卡尔曼(UKF)滤波的车辆行驶状态参数估计算法
容积卡尔曼滤波(Cubature Kalman filter, CKF)是基于三阶球面径向容积准则,根据系统变量采用一组容积点,逐渐逼近带有高斯噪声的系统均值和协方差。理论上是当前最接近贝叶斯滤波的近似算法,是解决非线性系统状态估计的强有力工具。
文献[7]建立了汽车动力学模型,轮胎模型和车轮速度耦合模型,并根据离散车辆模型设计了鲁棒的卡尔曼滤波器,用于车辆行驶状态的估计。提出了鲁棒容积卡尔曼(CKF)滤波器的自适应测量更新解决方案,以提高估计的鲁棒性,然后将轮速耦合关系引入鲁棒CKF 滤波器的测量更新方程和自适应侧滑角融合估计。由于系统状态噪声和测量噪声都存在不确定的系统统计特性,文献[8]运用交互式多模型(IMM)和容积卡尔曼滤波器(CKF)算法,实现对车辆状态的估计。其中IMM 算法模型数据集采用系统状态噪声和测量噪声作为系统统计特性的输入,每个子模型采用CKF进行估计,将获取的融合输出结果不断跟踪子模型的输出。
容积卡尔曼滤波(CKF)通过一阶精确积分的角度求解非线性积分问题[9],不需要计算复杂的雅克比矩阵(对于高度非线性滤波问题,很难求解系统的雅可比矩阵,甚至有些系统不存在雅可比矩阵)。基于奇异值分解(SVD)代替Cholesky 分解方法,利用矩阵奇异值分解把数据集映射到多维空间中[10],解决了估计过程中的四舍五入等误差,使误差协方差矩阵失去非正定性。CKF 在计算多维函数积分时具有高效特性,使其在非线性滤波方面具有更大的优势,并且计算精度高、实时性好。
1.3 基于联邦卡尔曼(FKF)滤波的车辆行驶状态参数估计算法
联邦卡尔曼滤波器是一种两层信息融合的结构,运用信息分配的原理,将整个系统中的各个部分动态信息分别分配给每个子滤波器,经子滤波器处理后再传给主滤波器进行融合,从实现信息的最优融合估计。
文献[11]对车辆行驶状态估计采用联邦卡尔曼滤波理论,构建两个基于扩展卡尔曼滤波理论的子滤波器,再通过主滤波器对两个子滤波器进行融合,实现对车辆行驶状态的估计。同时运用扩展卡尔曼滤波理论,实现对路面附着系数的估计,将车辆状态估计器与路面附着估计器联系在一起,形成闭环反馈系统。文献[12]采用联邦-容积卡尔曼滤波结合的方法对车辆行驶状态进行估计,通过信息融合技术对低成本传感器的信息进行融合,对车辆行驶状态作出实时准确估计。解决了实际应用在车辆行驶过程中,采用单一卡尔曼滤波算法容错性差、稳定性差等问题。
联邦卡尔曼滤波(FKF)算法多用于精度要求比较高的定位导航中,在对车辆状态参数估计中很少用到,随着信息技术的发展,汽车主动安全对车辆行驶状态参数的精度与稳定性要求越来越高,基于联邦卡尔曼滤波的多信息源融合的车辆状态参数估计逐渐引起国内外学者的高度关注。联邦卡尔曼滤波中可以有多个子滤波器,每个子滤波器可以根据实际的应用需求采用不同的估计算法,最后通过主滤波器进行融合,这使得它相对单一的卡尔曼滤波器具有设计灵活、容错性好、精度高和稳定性好的优点。
2 结论
(1)深入分析了扩展卡尔曼滤波、容积卡尔曼滤波和联邦卡尔曼滤波算法在车辆状态参数估计中的研究现状,根据各类算法在实际中的应用,分析了各自的优缺点。
(2)综合对比了各类算法在估计过程中的精度,以及算法适用场景,总结出基于联邦卡尔曼滤波的多信息源融合的车辆状态参数估计,可以有效提高估计的精度,成为目前主流的研究方向。
