基于RobotStudio的双机协同工作站仿真设计
2019-09-10李怡林
李怡林








摘 要:本文介绍了一种借助RobotStudio软件构建机器人搬运、焊接等多功能于一体的双机协作工作站虚拟仿真方案。首先,利用SolidWorks三维建模软件对机器人末端夹具进行三维设计,搭建基于RobotStudio仿真软件的双机协作虚拟仿真平台空间布局;其次,设计双机协作工作站工艺流程,完成动态Smart组件及工作站逻辑设定;最后,完成工作站系统离线编程与仿真优化。仿真结果表明,该虚拟双机协作工作站可实现搬运、焊接等作业,该方案可为焊接生产线设计提供可行性参考。
关键词:RobotStudio;双机协同;离线仿真
中图分类号:TP242 文献标识码:A 文章编号:1003-5168(2019)25-0014-05
Simulation Design of Two-machine Cooperative
Workstation Based on RobotStudio
LI Yilin
(Sichuan Technology & Business College,Chengdu Sichuan 611830)
Abstract: This paper introduced a virtual simulation scheme of two computer cooperative workstation, which was based on the RobotStudio software to build a multi-functional integration of robot handling and welding. First of all, 3D design of robot end fixture was carried out by using SolidWorks 3D modeling software, and spatial layout of dual computer collaborative virtual simulation platform was built based on RobotStudio simulation software; secondly, process flow of dual computer collaborative workstation was designed, dynamic Smart components and logic setting of workstation were completed; finally, offline programming and simulation optimization of workstation system were completed. The simulation results show that the virtual two machine cooperative workstation can realize the operation of carrying and welding, and the scheme can provide a feasible reference for the design of welding production line.
Keywords: RobotStudio;two computer collaboration;offline simulation
工业机器人应用仿真是指通过计算机软件对实际的机器人系统进行模拟和检测,其间可以在仿真软件中进行与实际一致的全部工业机器人应用编程与调试[1]。为提高编程效率,使编程者远离危险的工作环境,改善编程环境,当前可以采用机器人虚拟离线编程[2]。离线编程在实际机器人安装前,通过可视化及可确认的解决方案和布局来降低风险,并通过创建更加精确的路径来获得更高的部件质量。
在传统的工业机器人逐渐取代单调、重复性高、危险性强的工作之时,协同作业的机器人也将会慢慢渗入各工业领域,其具有提高生产效率和生产稳定性的作用。为此,本文分别选用ABB IRB 1410型机器人和ABB IRB 4600型机器人构建了可以进行搬运、装配、焊接的多功能一体的双机器人协同仿真工作站。
1 搭建仿真平台
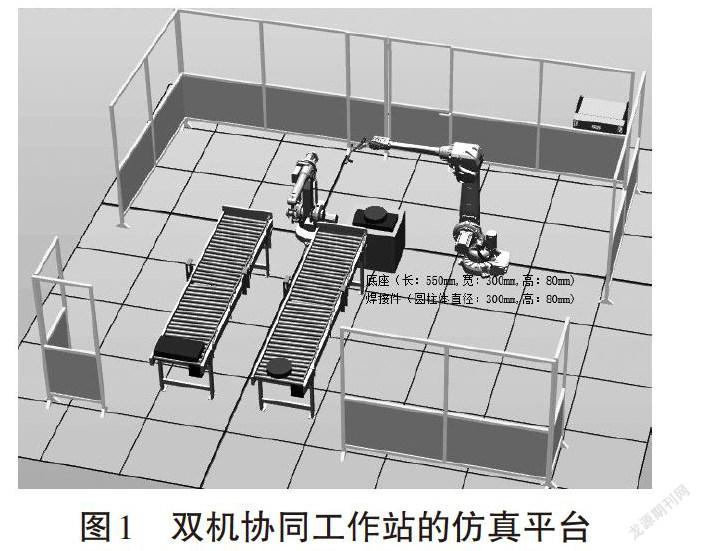
工作站布局如图1所示,工作站以一台IRB1410型机器人和一台IRB4600型机器人为核心。IRB1410型机器人末端配备手爪,用于搬运和装配零件。IRB4600型机器人末端配备焊枪设备,用于组合零件的焊接。焊接零件如图2所示,焊接工艺参数如表1所示[3]。当底座零件到达输送链的末端时,面传感器检测发出信号反馈给IRB1410型机器人,夹取零件,将底座摆放在焊接台上,机器人回到等待位置,紧接着焊接零件通过输送链到达末端,面传感器检测并反馈信号给IRB1410型机器人,夹取焊接零件,将其放在底座零件上的固定位置。当IRB1410型机器人回到等待位置时,IRB4600型机器人进行焊接,焊接完成后回到等待位置。
另外,焊接工艺的技术要求为:焊前准备,在坡口及坡口边缘各25mm范围内,将油、污、锈、垢和氧化皮清除,直至呈现金属光泽;焊缝表面无裂纹、气孔及咬边等缺陷为合格;焊缝余高[e1]≤1.5mm。
2 仿真系统设计
虚拟仿真技术是目前机器人柔性制造研究的热点,尤其在设计阶段,最直观的效果是利用专业软件仿真实际的机器人制造、装配等过程,以可视化的方式展示并改进系统的性能[4]。
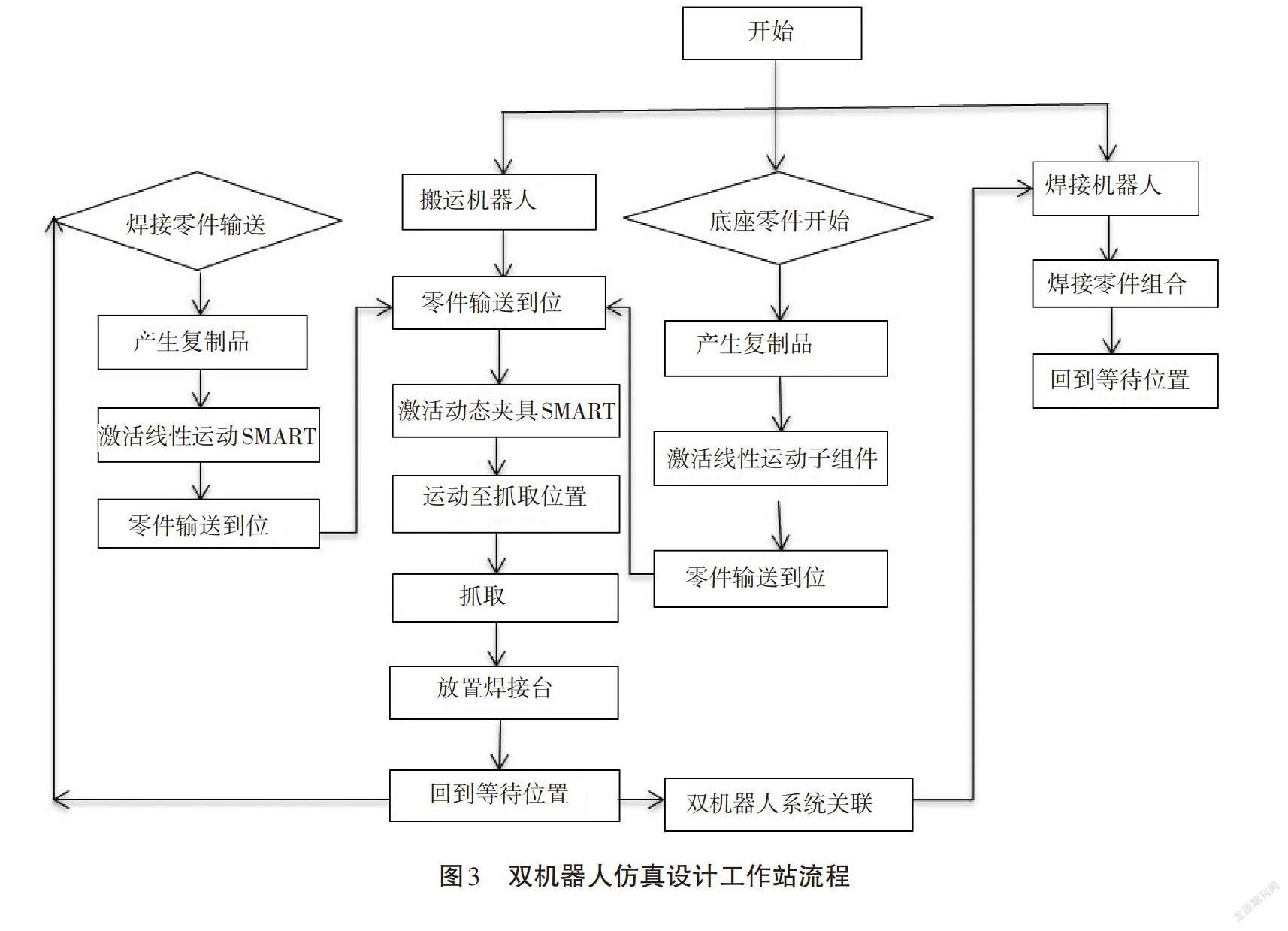
2.1 仿真系统设计流程
双机器人仿真设计工作站流程如圖3所示。
2.2 Smart组件设计
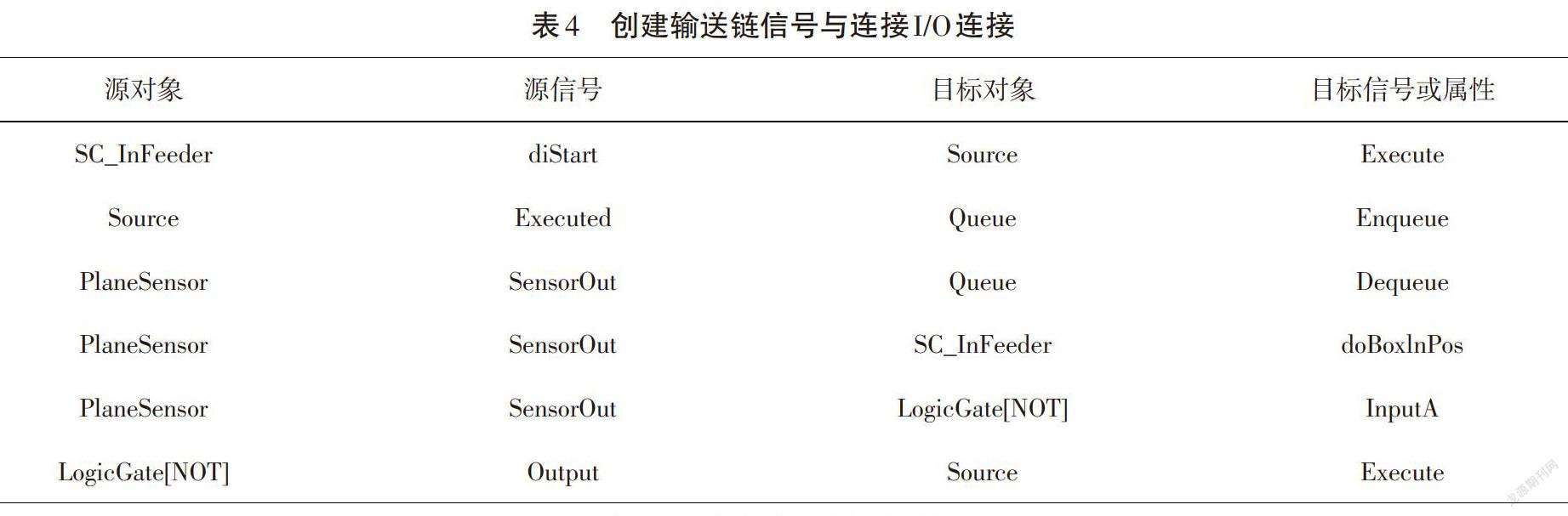
2.2.1 用Smart组件创建动态输送链SC_InFeeder。Smart组件是RobotStudio的一种仿真功能,专门用于仿真模拟ABB型号机器人,因此在本研究中具有良好的应用价值[5]。在RobotStudio中,Smart组件是实现动画效果的高效工具。Smart组件输送链的动态效果包含:输送链前端自动生成复制品、复制品随着输送链向前运动、复制品到达输送链末端后停止运动、复制品被移走后输送链前端再次生成复制品,依次循环。
本文以底座零件为例,介绍如何创建属性与连接以及创建信号与连接,如表2至表4所示。属性连接就是指各Smart子组件的某项属性之间的连接。I/O信号指的是在本工作站中自行创建的数字信号,用于与各个Smart子组件进行信号交互。I/O连接指的是创建的I/O信号与Smart子组件信号的连接关系,以及各Smart子组件之间的信号连接关系。
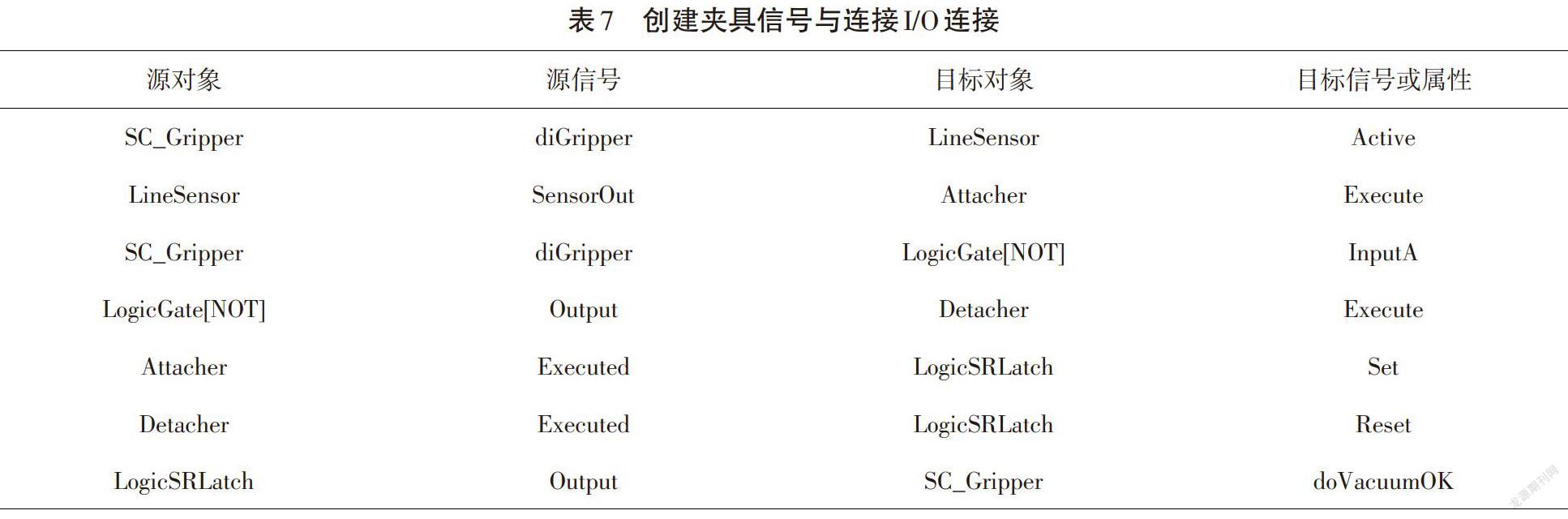
2.2.2 用Smart组件创建动态夹具SC_Gripper。夹具动态效果包含三个方面,即在输送链末端夹取复制品、在放置位置将其释放、自动置位复位真空反馈信号,如表5至表7所示。
2.3 工作站逻辑设定
2.3.1 机器人I/O信号。将Smart组件的输入/输出信号与机器人端的输入/输出信号作信号关联,这就是工作站逻辑设定。Smart组件的输出信号作为机器人端的输入信号,机器人端的输出信号作为Smart组件的输入信号,这样也可将Smart组件当作一个与机器人进行I/O通信的PLC。ABB IRB 1410型机器人I/O信号和ABB IRB 4600型机器人I/O信号分别如表8和表9所示。
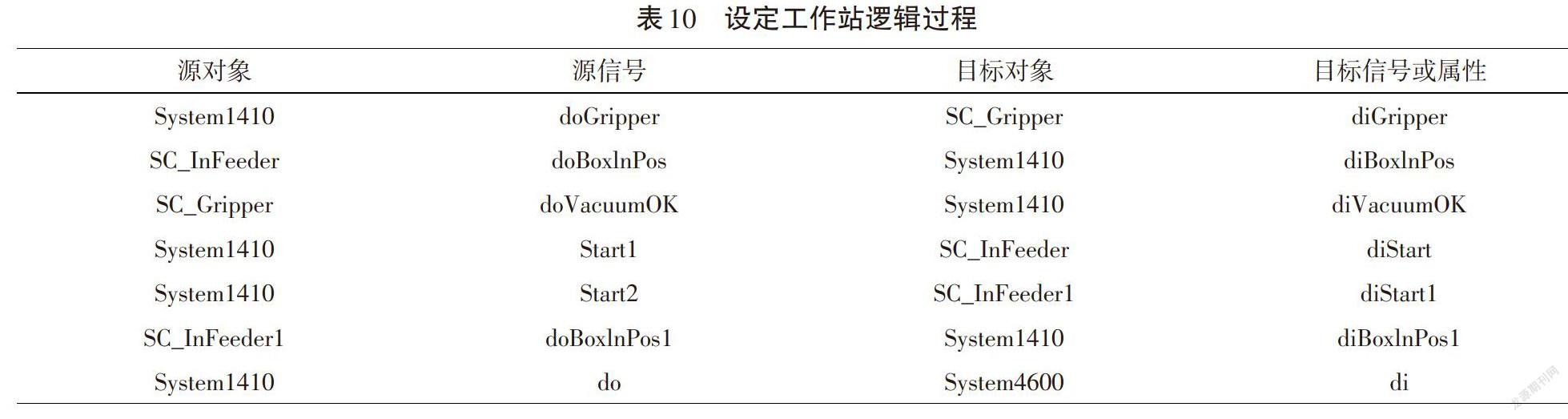
2.3.2 设定工作站逻辑。在本任务中,创建I/O信号连接的过程中,需要注意的是,在选择机器人信号时,选的是机器人系统,而不是默认于列表首位的工作站,如表10所示。
3 系统编程与仿真
3.1 程序编制
ABB IRB 1410型机器人程序如下:
PROC main()
Reset start1;
Reset do;
Reset start2;
Set start1;
WaitDI diBoxlnPos, 1;
MoveAbsJ [[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]\NoEOffs, v1000, fine, tool0;
MoveJ p10, v1000, fine, tool0;
Set doGripper;
WaitDI diVacuumOK, 1;
MoveJ p20, v1000, fine, tool0;
MoveJ p30, v1000, fine, tool0;
Reset doGripper;
WaitDI diVacuumOK, 0;
MoveJ p20, v1000, fine, tool0;
MoveAbsJ [[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]\NoEOffs, v1000, fine, tool0;
Set start2;
WaitDI diBoxlnPos1, 1;
MoveJ p40, v1000, fine, tool0;
Set doGripper;
WaitDI diVacuumOK, 1;
MoveJ p50, v1000, fine, tool0;
MoveJ Offs(p60,79.70,55.03,0), v1000, fine, tool0;
Reset doGripper;
WaitDI diVacuumOK, 0;
MoveJ p50, v1000, fine, tool0;
MoveAbsJ [[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]\NoEOffs, v1000, fine, tool0;
Set do;
ENDPROC
ENDMODULE
ABB IRB 4600型機器人程序如下:
PROC main()
!Add your code here
WaitDI di, 1;
MoveAbsJ [[8.20053,-35.5002,35.5932,-7.38807,48.207,11.0297],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]\NoEOffs, v1000, z50, tool0;
MoveJ p10, v1000, fine, tool0;
MoveC p20, p30, v1000, fine, tool0;
MoveC p40, p10, v1000, fine, tool0;
MoveAbsJ [[8.20053,-35.5002,35.5932,-7.38807,48.207,11.0297],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]\NoEOffs, v1000, z50, tool0;
MoveJ p130, v1000, z50, tool0;
ENDPROC
ENDMODULE
3.2 仿真分析及优化
工业机器人仿真因具备安全、快速、程序优化方便等优点已经成为工业机器人应用领域重要的研究方向之一[5-7]。本研究搭建了双机协作仿真工作站,其主要包括Smart组件的运用、I/O通信的设置、工作站逻辑设定以及机器人离线编程等内容,经检验,该工作站能正常工作。在建立双机器人协作工作站时,要重点突破两点:Smart组件的应用及工作站逻辑设定。同时,要注意在设置I/O信号时理清思路、关系一一对应,理解各个信号存在的意义。在编辑程序时,要一步衔接一步、层层递进,提升程序的可理解性和易修改性。
4 结论
工业机器人在现代制造行业中应用广泛,在RobotStudio中离线编程、操作仿真,能够有效地辅助设计人员进行机器人虚拟示教、机器人工作站布局、机器人工作姿态优化。但双机器人协作,载重能力和刚性更优,适应性更强,效率更高。本文在仿真软件中进行与实际一致的全部工业机器人应用编程与调试,并通过离线编程创建更加精确的路径来获得更高的部件质量。
参考文献:
[1]叶晖.工业机器人工程应用虚拟仿真教程[M].北京:机械工业出版社,2014.
[2]邱雪松,肖超,谭候金,等.大型机器人冲压生产线多软件联合仿真[J].中国机械工程,2016(6):772-777.
[3]汪励,陈小艳.工业机器人工作站集成[M].北京:机械工业出版社,2014.
[4]刘振宇,谭建荣.面向过程的虚拟环境中产品装配建模研究[J].中国机械工程,2013(3):1690-1693.
[5]郝建豹,许焕彬,林炯南.基于RobotStudio的多机器人生产线仿真设计[J].组合机床与自动化加工技术,2017(11):122-125.
[6]侯仰强,龙洋.基于RobotStudio的自动冲压生产线仿真与优化[J].中国重型装备,2017(3):6-8.
[7]金自立.工业机器人的离线编程和虚拟仿真技术[J].机器人技术与应用,2015(6):44-46.
