无人机建模与仿真技术
2019-09-10吕晓林
吕晓林







无人机在地空武器系统的模拟演练和兵力推演过程中,扮演中重要的角色,在现代战争发挥着越来越重要的作用。通过建立无人机运动学和动力学模型,分析了欧拉法及改进欧拉法、龙格——库塔法(四阶)、Admas预报—校正方法等数值解算方法和它们的优缺点,研究了数字仿真、半实物仿真和物理仿真工作原理、系统组成和实现方法,对无人机建模和仿真进行了系统阐述,具有—定的借鉴意义和推广应用价值。
在地空武器系统地面模拟演练过程中,无人机扮演着蓝军的角色;在事关战争胜负的兵力推演中,无人机充当了空中来袭敌方,无人机能否逼真地模拟敌方,其建模与仿真是关键,因此有必要对无人机系统建模和仿真进行系统阐述。
無人机建模
无人机的运动学和动力学模型
常规气动外形的无人机运动学和动力学数学模型是十二阶非线性微分方程组(T-T体系)。当存在定值风扰动W时,此时无人机的地速V与空速U有以下的关系,即V=U+W,假设V、U、W在T-T体系中的各自的分量分别为:
四阶龙格——库塔公式是在离线仿真中最常用的微分方程算法,考虑到现在CPU性能大幅度的提高,也可应用在实时仿真中。
无人机仿真技术
数字仿真
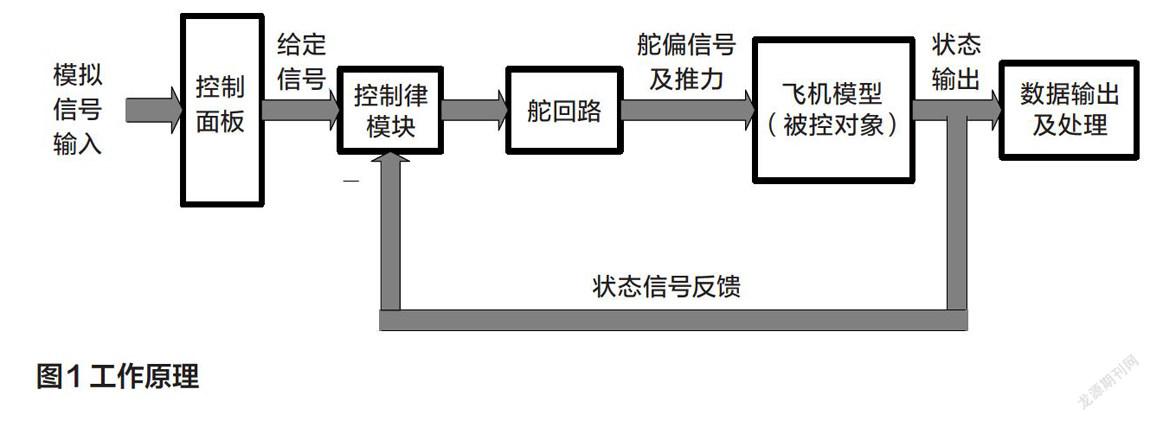
数字仿真主要是通过建立无人机系统数学模型,通过仿真计算机实时解算来对无人机飞行轨迹和三轴姿态、速度、高度等飞行参数进行仿真,模拟无人机真实的飞行状况。其工作原理和组成见图1。
半实物仿真
(1)半实物仿真原理和组成
半实物仿真系统由实物(飞控计算机和舵机)和仿真平台(无人机模型、传感器仿真模块)组成。在仿真过程中,飞控计算机主要进行控制律计算、接收遥控指令、控制舵机和发动机做出相应的响应,仿真计算机采集这些响应并进行无人机动力学解算,将解算出的数据传输到传感器仿真模块,飞控计算机根据传感器仿真模块提供的信息,解算出控制参数控制飞机稳定飞行,同时将飞行参数下传进行显示和存贮,从而构成完整的闭环飞行系统。仿真系统组成和工作原理见图3所示。
(2)半实物仿真实现
常规仿真
仿真系统主要由仿真软件和仿真硬件组成。硬件主要由仿真计算机、接口卡(串口、D/A、ND卡龃成。软件由无人机运动学和动力学模型解算软件、传感器仿真软件、人机交互界面等组成。仿真计算机主要用于对无人机模型解算、接口通信及仿真结果的可视化处理、显示和存储等,GPS、高度、垂直陀螺、角速度等数据可以通过实时解算靶机的动力学和运动学模型而得到,磁航向的仿真数据可以通过将飞机航向根据解算相关公式和无人机机姿态修正而得到。显示界面如图4所示。
基于Matlab/Simulink仿真
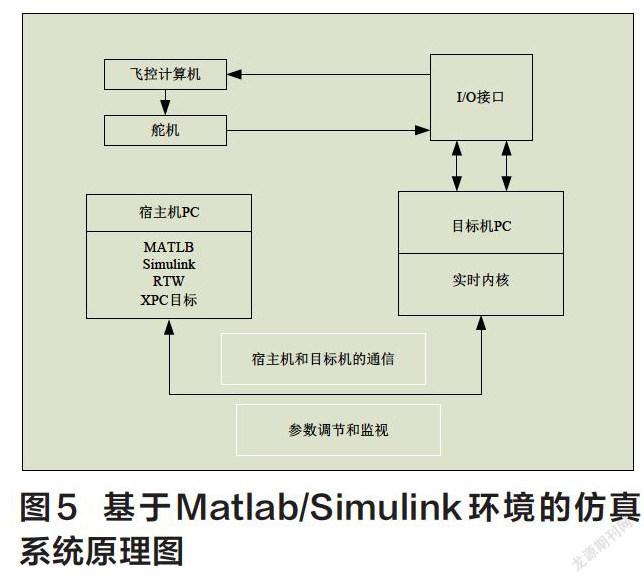
MATLAB可以方便地通过Simulink对无人机运动进行建模和数字仿真。在MATLAB环境下利用其实时工具箱RTW,通过目标链接的方式和Simulink联系在一起,通过单独的实时内核方式驱动外部硬件设备,完成系统实时控制。xPC半实物仿真目标是MathWorks公司提供和发行的一个基于MATLAB/Real-Time Workshop体系框架的辅助产品,可以将PC计算机转变为一个实时系统,支持许多类型的UO设备,提供S-function作为Simulink功能模块的扩展。xPC目标采用宿主机一目标机的技术途径,其中宿主机拥有运行MATLAB/Simulink,用Simulink模块图来创建模型经进行非实时的仿真,用RTW代码生成器和C编译器来生成可执行代码;目标机执行所生成的代码,通过以太网或串口连接实现宿主机和目标机之间的通信。系统原理如5图,仿真过程如图6所示。
宿主机安装了VC++和MATLAB系列软件,用于系统分析、数字仿真和实时仿真时的数据采集与监测;目标机安装了用于实时仿真的xPC内核。宿主机和目标机之间按照TCP/IP协议通过以太网连接。目标机和飞控计算机之间的GPS、高度和航向等信息用串口通信,陀螺和角速率信息用D/A卡通信;目标机和舵机之间为ND卡通信。
物理仿真
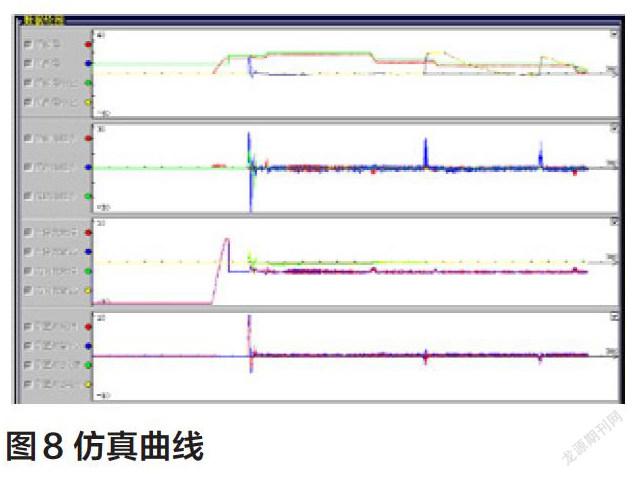
将陀螺平台、角速度陀螺和航向传感器安装在三轴转台上,仿真计算机通过解算输出信号控制三轴转台按照无人机的飞行姿态进行三轴转动,同时陀螺平台、角速度陀螺和航向传感器输出信号到飞控计算机,飞控计算机将控制信号反馈给仿真计算机完成闭环控制。仿真原理见图7,仿真曲线见图8。
结束语
通过建立无人机运动学和动力学模型,分析了十二阶微分方程的数值解算方法,研究了数字仿真、半实物仿真和物理仿真工作原理和实现方法,系统阐述了无人机模型数字解算和仿真方法,对无人机仿真具有一定的推广应用价值。
