靶机阵地发射及回收航拍方法研究
2019-09-10王雷计世勋
王雷 计世勋



设计了一种基于多旋翼无人机的靶机阵地发射回收的航拍方法,对高速后上方拍摄、高速侧方拍摄、常速后上方拍摄、常速侧方拍摄四种拍摄模式进行了计算,对搭载的摄录平台进行了选型比对,对类似目标拍摄具有借鉴意义。
靶机是一种动态实物模拟器,替代真实的空中飞行器,用于防空武器系统的试验鉴定、部队演习等。靶机的使用贯穿于各型防空武器系统科研试验和军事训练的始终,不仅为武器系统试验提供一个攻击目标,其性能更具有一个尺度作用,直接关系到对武器装备的正确评价与应用,对部队防空武器的发展和防空能力的提高起着至关重要的作用。目前靶机发射回收观测方法主要基于地面的长焦摄像机及操控人员目测,其观测范围较近且在靶机回收时不易捕捉到目标。利用多旋翼无人机搭载高速摄录设备进行航拍将大为提高观测视场范围,利于观察整个发射阵地态势,同时便于更早发现回收返航的靶机。本文对基于多旋翼无人机的靶机阵地发射及回收的航拍方法展开研究。
基本模型建立
以现有某型靶机基本为例,该机长3m,翼展1.6m,发射初速度为87m/s。陆上发射时,发射场风力情况:年平均风速5m/s,4-5月平均最大为6m/s.1月和12月平均最小为4m/s,最大风力33m/s;发射场气温情况:最低温度-25.40C,最高温度34.30C;发射前15min锁定目标,发射后2min悬停跟踪摄像,目标从视场中消失后停止摄像。目标回收前10min升空至回收区域待命,发现回收目标后跟踪摄录,顺利回收后停止摄录。要求拍摄分辨率达到能够识别目标的程度,拍摄时间希望尽可能长。在靶机发射段,其运动轨迹可认为是仰角15。的直线,设TO时刻助推器点火,(TO+2)时刻目标脱离助推器(加速度为59),之后目标继续以4m/s加速度加速运动。靶机回收过程为飞临预定回收地域上空后空中停车,然后开伞飘落到预定回收位置或者附近位置,飘出范围通常为2-3km。整个回收过程中,目标的速度很低。
拍摄方案设计
由于回收过程的拍摄对载荷要求相对较低,只需要载荷具备搜索跟踪功能并满足分辨率要求即可,因此,下面重点针对发射过程制定拍摄方案。侧方拍摄时,必须与发射弹道垂面保持300m以上的水平距离,后上方拍摄时,必须在发射点后方30m以外进行拍摄。初步设定拍摄目标为:至少拍摄到目标脱离助推器之后2s的运动轨迹(直线距离约182m,仰角15。),先分两种情况进行方案论述,再综合对比拍摄效果选取最终的拍摄方案。
后上方拍摄
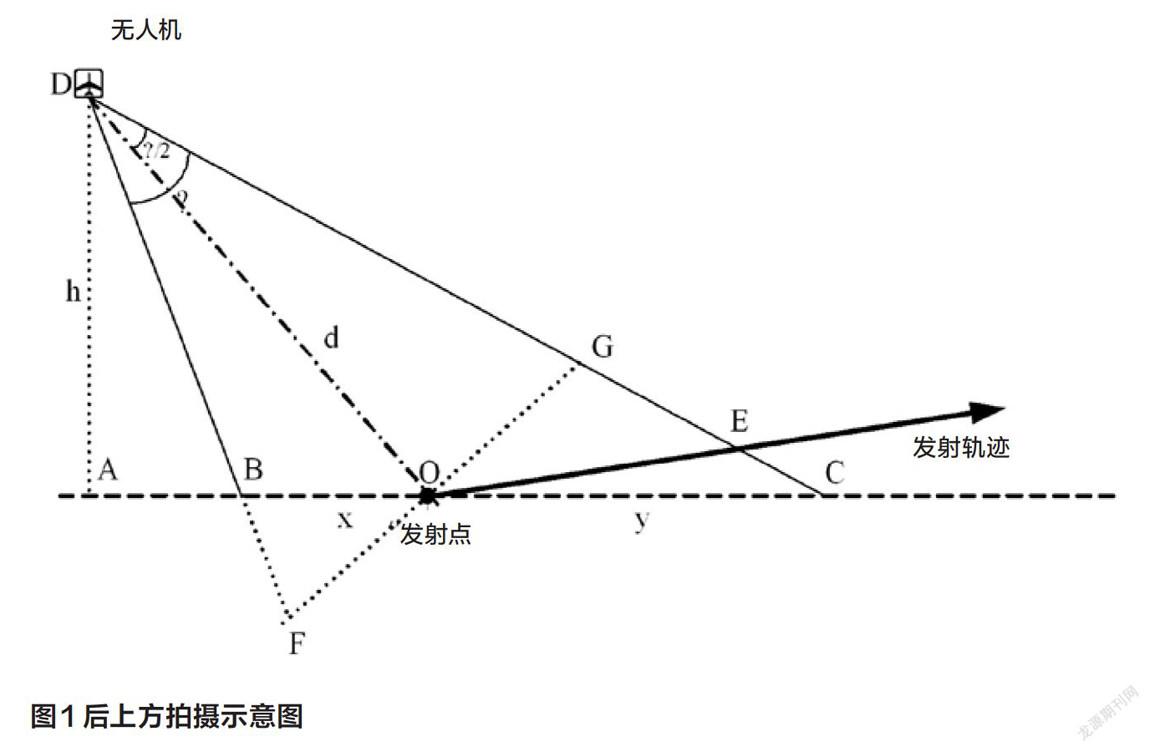
后上方拍摄时,拍摄示意图如图1所示。
其中,AO=s为无人机离开发射点后方的水平距离(≥30m),h为无人机拍摄的相对高度,设定拍摄时摄像机的光轴对准发射点O、横向视场(图中未示出)为w,则FG=v为等效纵向视场,BC=(X+y)为实际拍摄到的纵向视场大小,OE段为实际能够拍摄到的发射过程。实际载荷选型时,给定AO=s的距离、作业高度h以及期望的横向视场大小,即可根据图1的几何关系计算出各项参数或指标。
侧方拍摄
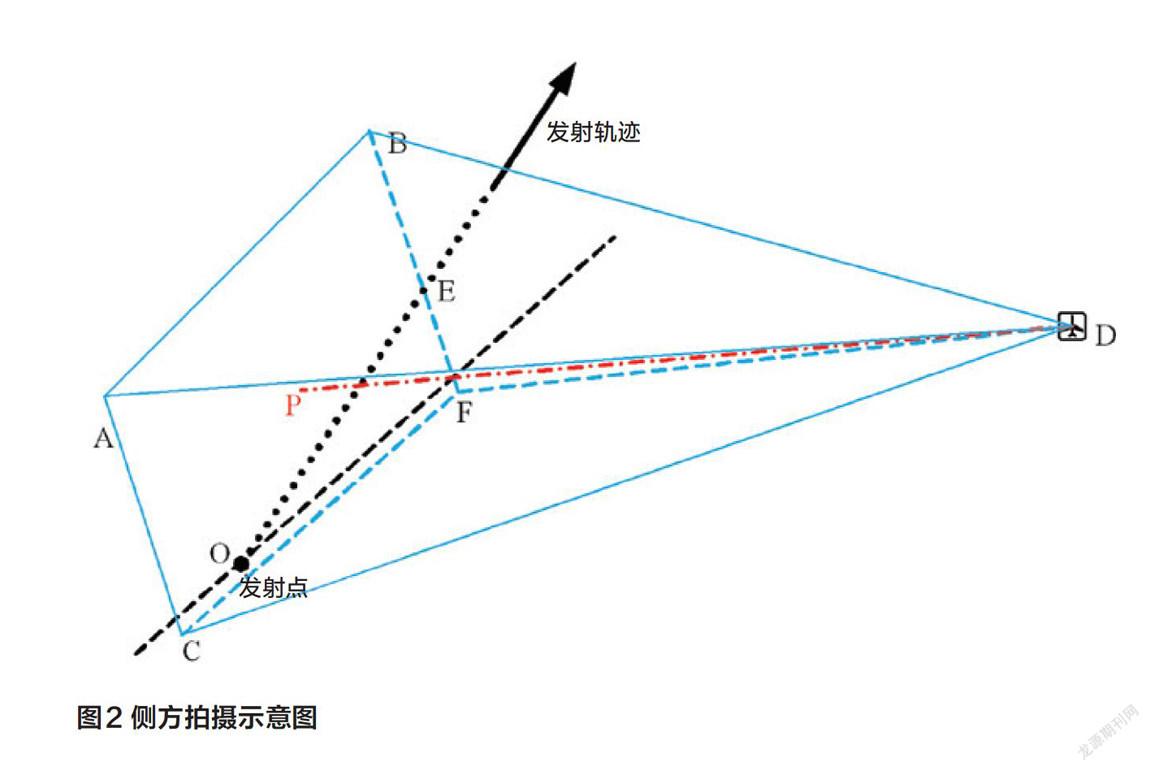
侧方拍摄时,拍摄示意图如图2所示。其中,DP为拍摄的光轴,同时也近似为无人机离开发射弹道垂面侧方的水平距离(≥300m),ABFC为拍摄时截止到发射垂面的视场大小,OE段为实际能够拍摄到的发射过程。
实际载荷选型时,给定DP=d的距离、期望的横向视场w大小,即可根据图2的几何关系计算出各项参数或指标。
载荷选型
考虑旋翼机的带载能力现状,按照高速摄录装置和常速摄录装置两种配置分别进行选型。
高速摄录装置
(1)后上方拍摄
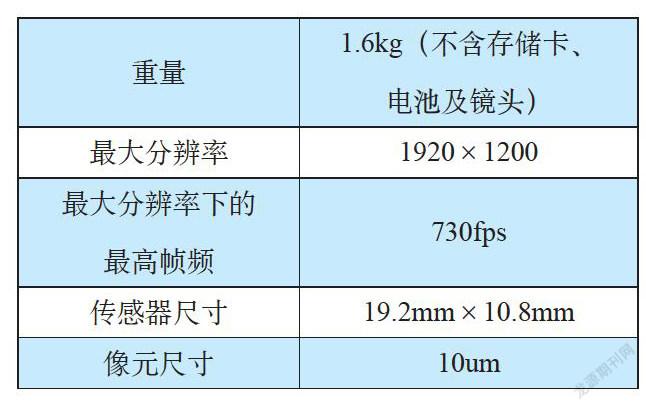
要实现对目标的精确识别,目标翼展方向至少要在传感器上占到8个像元以上,因此,系统分辨率至少要优于1 .61 4m/8≈0.2m。如果横向视场达到100m,则传感器横向的分辨率至少为100/0.2=500,由此初步选定美国VisionResearch公司R系列Micr0 120型高速摄像机.性能指标如下所示。
根据图1的几何关系,选定不同的AO=s距离、作业高度h和横向视场,判别条件为:所计算的视场是否已经覆盖目标脱离助推器后2s的运动轨迹。在计算过程中,选定Micr0120型高速摄像机的分辨率为1024×1024,对应的帧频为1530fps,计算结果表明只有两组数据满足上述判别条件,因此拍摄方案为无人机离开发射点后方水平距离100m,悬停高度100m,摄像机焦距7.2mm,光轴与水平线夹角45°,视场角为70.5°,拍摄到的实际视场大小为200m×565.7m,横向分辨率为0.2m,纵向分辨率为0.55m。目标脱离助推器2s内,将可拍摄约3000帧图像。
(2)侧方拍摄
侧方拍摄仍选定美国VisionResearch公司R系列Micr0120型高速摄像机,根据图2的几何关系,给定不同的DP=d距离,可得到表1的计算结果。
判别条件为:所计算的视场已经覆盖目标脱离助推器后2s的运动轨迹。在计算过程中,选定Micr0 120型高速摄像机的分辨率为1280×800,对应的帧频为1600fps,拍摄方案为无人机离开发射弹道垂面侧方的水平距离300m,悬停高度75m,摄像机焦距16mm,横向视场角为43.6°,拍摄到的视场大小为240m x150m,分辨率为0.19m。目标脱离助推器2s内,将可拍摄约3200帧图像。
常速摄录装置
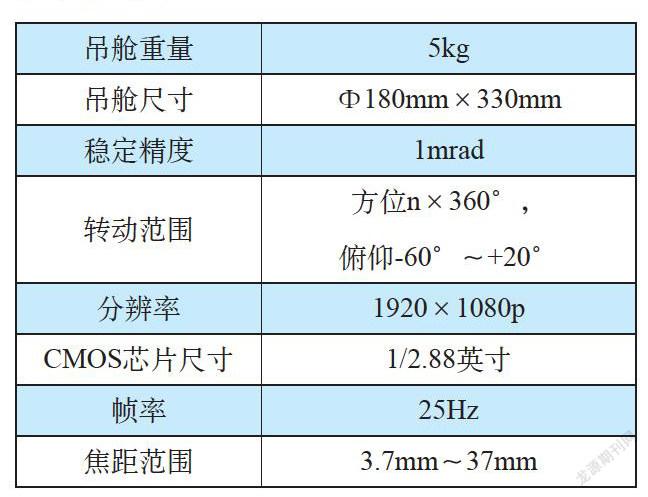
如果考虑实时回传,则只能选择常速摄录装置,此时载荷选型尽可能保证传感器的分辨率较高、吊舱的稳定精度较高,以达到较好的摄录效果。考虑到无人机的带载能力,选择某型光电吊舱,其性能指标如下:
(1)后上方拍摄
根据图1几何关系,选定不同的AO=s距离、作业高度h和横向视场,可以得到表2的计算结果,其中的判别条件同上。在计算过程中,选定摄像机的分辨率为1920×1080,對应的帧频为25fps,计算结果显示只有一组数据满足上述判别条件,无人机离开发射点后方水平距离300m,悬停高度100m,摄像机焦距6.1mm,光轴与水平线夹角18.4。,视场角为25.1°,拍摄到的实际视场大小为250m×801.2m,横向分辨率为0.13m,纵向分辨率为0.74m。目标脱离助推器2s内,将可拍摄约50帧图像。
(2)侧方拍摄
根据图2的几何关系,给定不同的DP=d距离,可得到表2的计算结果。
判别条件同上。在计算过程中,选定摄像机的分辨率为1920×1080,对应的帧频为25fps.拍摄方案为无人机离开发射弹道垂面侧方的水平距离300m,悬停高度75m,摄像机焦距5.4mm,横向视场角为47.9。,拍摄到的视场大小为266.7m×150m,分辨率为0.14m。目标脱离助推器2s内,将可拍摄约50帧图像。
结束语
综合对比上述4种拍摄方案(即高速后上方拍摄、高速侧方拍摄、常速后上方拍摄、常速侧方拍摄),从拍摄效果来看,可以得出以下结论:如果可以进行机载录制,不要求实时回传,推荐高速拍摄,能够拍到足够多的帧数,视频非常连贯。后上方拍摄能更清楚地观察目标的翼展方向,而侧方拍摄可以更清楚地观察目标的机长方向。如果必须进行机载录制,则只能选取常速拍摄,只能拍到很少的帧数,很可能还会出现拖尾现象。拍摄方位的选取则与高速装置情况下有相似的结论。
(参考文献:略。如有需要,请联系编辑部)
