基于CATIA软件的交叉臂式玻璃升降器设计
2019-09-10曹献计刘颖陈凯歌徐西永
曹献计 刘颖 陈凯歌 徐西永
【摘 要】文章首先介绍了汽车电动玻璃升降器的种类及特点,并对各种玻璃升降器进行了比较;然后又介绍了交叉臂式玻璃升降器在布置时的设计要点,最后利用CATIA软件对交叉臂式玻璃升降器进行了运动分析。
【关键词】玻璃升降器;交叉臂式;CATIA软件;设计
1 引言
车门玻璃升降系统是整车开闭件的重要组成部分,对开闭件系统乃至整车的质量起着重要的作用。玻璃升降系统一旦失效,就会给行车安全带来隐患,影响整车品质。由此可见其安全性、可靠性在整车中显得至关重要。所以该系统的设计必须要保证车门玻璃的平稳升降,同时要具备良好的密封性。本文重点介绍该系统的设计要点及如何借助计算机软件有效地进行设计阶段的校核分析。
2 交叉臂式玻璃升降器运动校核
2.1 运动模型的建立
作者在网上看到许多网友问到如何利用CATIA软件进行交叉臂式玻璃升降器的运动校核,作者现在以国内某款轿车的左前门玻璃升降器为例,介绍一下利用CATIA软件进行交叉臂式玻璃升降器运动校核的方法。运动模型建立的步骤如下:
(1)首先将玻璃升降器总成拆解成各个零件,
(2)建立驱动电机与升降臂的旋转约束,设定驱动条件为旋转角度,
(3)建立升降臂与平衡臂之间的旋转约束,
(4)建立固定臂滑块与固定臂之间的滑动约束,
(5)由于固定臂滑块始终是沿着固定臂滑动的,所以平衡臂与固定臂滑块之间建立球铰接副,
(6)建立玻璃托架前滑块与玻璃托架之间的滑动约束,
(7)在实际的运动过程中玻璃托架前滑块始终是沿着玻璃托架滑动的,升降臂及平衡臂会变形随玻璃托架一起运动,升降臂及平衡臂与玻璃托架滑块之间是球铰连接的。而CATIA软件中是无法模拟升降臂及平衡臂的变形量的,我们只能用玻璃托架滑块与升降臂及平衡臂在模拟运动过程中发生的位移量来表示升降臂及平衡臂的变形量,因此我们建立玻璃托架前滑块与平衡臂之间的点线副,
(8)玻璃托架后滑块与玻璃托架及升降臂之间的运动副与玻璃托架前滑块与玻璃托架及平衡臂之间的运动副是完全一样的,可以仿照步骤六及步骤七建立。
(9)建立玻璃托架与玻璃总成之间的刚性连接约束,
(10)建立玻璃总成与玻璃导轨之间的运动约束时,需要注意的是玻璃总成与玻璃导轨之间一定要通过一个点线副及两个点面副约束,否则在运动模拟的过程中玻璃总成就会偏出玻璃导轨,模拟不了实际的运动情况。约束建立的方法是:首先提取玻璃的外表面,取出玻璃前后边界及上边界的中点,通过玻璃上边界的中点作与玻璃导轨平行的一个平面,求出此平面与玻璃面的交线;用玻璃上边界的中点与所求出的交线建立点线副;最后在用玻璃前后边界的中点与玻璃面建立两个点面副。
(11)建立驱动电机、玻璃导轨总成及固定臂之间的刚性连接副。可以仿照步骤九去建立。
(12)最后将驱动电机设为固定零件,至此整个运动分析模型建立完毕。
2.2 运动模型的分析
運动模型建立后需要对运动结果进行分析,检查一下所布置的玻璃升降器挠度的布置是否满足要求。
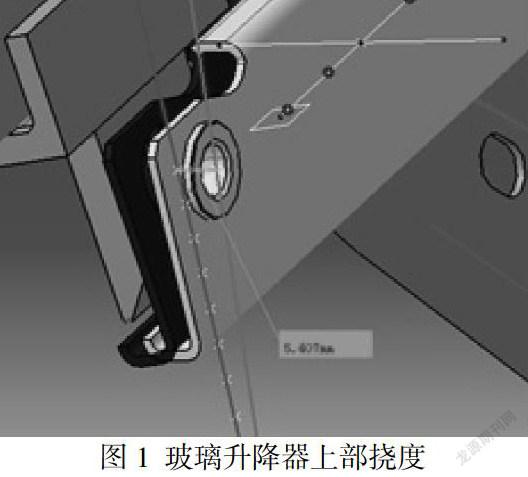
首先利用CATIA软件生成出玻璃托架的理论运动轨迹及实际的运动轨迹,如图所示。图中的黄色玻璃托架是没有安装玻璃情况下的理论位置,蓝色的玻璃托架是安装玻璃情况下的实际位置;紫色的线是玻璃托架的理论运动轨迹,红色的线是玻璃托架的实际运动轨迹,图中的数值5.41mm就是挠度A。在此位置升降器受到玻璃向内的拉力,升降器向车内弯曲变形。
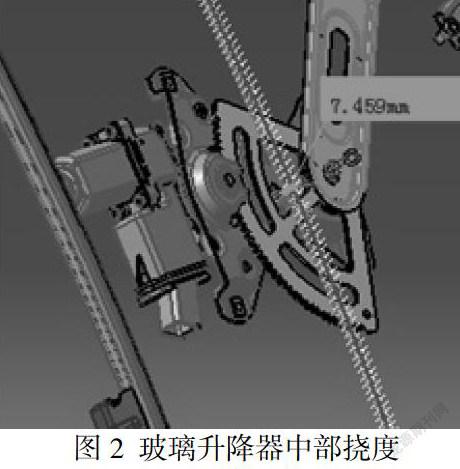
图2中的数值7.46mm就是挠度B。在此位置升降器受到玻璃向外的拉力,升降器向车外弯曲变形。
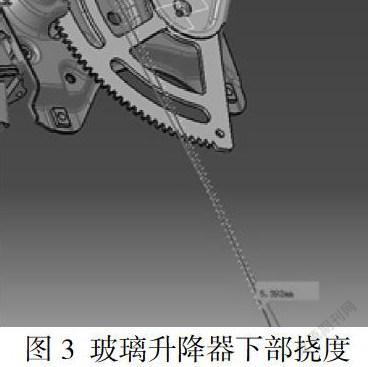
图3中的数值5.39mm就是挠度C。在此位置升降器受到玻璃向内的拉力,升降器向车内弯曲变形。
由上面的分析可以看出此款交叉臂式玻璃升降器的布置满足B>A≈C的要求,升降器的最大变形量为7.46mm。。
参考文献:
[1] 郭竹亭.汽车车身设计[M].吉林:吉林科学技术出版社,1994.
[2] 《汽车工程手册》编辑委员会.汽车工程手册设计篇[M].人民交通出版社,2001.
[3] 莫建伟,韦乐侠.汽车交叉臂式玻璃升降器设计要点讨论[D].柳州:柳州五菱汽车联合发展有限公司,2008.
[4] 谷志竑.基于车门系统的电动玻璃升降器布置和仿真[D].上海:上海交通大学,2006.
(作者单位:济南吉利汽车有限公司)