输电线路无人机精细化巡检自动驾驶系统研发与应用
2019-09-10陶雄俊阮峻王飞李红盛
陶雄俊 阮峻 王飞 李红盛


【摘 要】受输电线路精细化内容和要求的限制,人工操控无人机由于操作水平的不同,使得无人机精细化巡检的拍摄位置、高度、部位、顺序、质量等因人而异,规范性较差,这不仅增加了巡视的安全风险,还加大了缺陷分析的难度。本文针对输电线路精细化巡检的内容和要求,采用智能飞行控制技术和机器学习算法,自主研发了一款针对输电线路无人机精细化巡检的自动驾驶系统。该系统通过利用搭载RTK的无人机,可自动记录无人机巡检的起飞位置、杆塔部位的选定位置、拍摄角度等全过程信息,形成全自动化杆塔精细化空中飞行巡视采集作业流程,实现无人机输电线路的自动精细化巡检。
【關键词】输电线路;精细化巡检;自动驾驶系统
随着高等级输电线路的不断发展,输电线路的精细化巡检作业对维护区域电网的安全、稳定和高效运行越来越重要,也是电网运行的当务之急。输电线路跨区域分布,点多面广,所处地形复杂,自然环境恶劣,输电线路设备长期暴露在野外,受到持续的机械张力、雷击闪电、材料老化、覆冰以及人为因素的影响容易造成倒塌、断股、磨损、腐蚀和舞动等现象,绝缘子还存在被雷击损伤、树木生长引起高压放电以及绝缘劣化而导致输电线路事故,杆塔存在被偷盗等意外事件。传统的人工输电线路精细化巡检工作强度大、时效差、巡视效果差,难以多方位观察线路本体、线路附属设备、杆塔本体、塔上附属设备的状况,需要巡检人员爬塔,并借助辅助器材对电力设施进行近距离巡视,对人身安全构成很大威胁。无人机技术的发展和通航领域政策的逐步放开,有效地解决了电力巡检的难题,推进了传统人工巡检模式向机巡模式的转变。
1.无人机精细化巡检现状
随着无人机市场的不断扩大和无人机精细化巡检的不断深入,多旋翼无人机由于灵活快速、安全性高、操作简单、具有中、近距离的定点和机动巡查等特点,通过搭建RTK高精度定位模块,可实现输电线路的精细化巡检。无人机飞手通过采用人工操控多旋翼无人机的方式进行精细化巡检,由于操作水平的不同,无人机的拍摄位置、高度、部位、顺序等均会有较大差异,每次的拍摄质量也因人而异,规范性较差,这不仅增加了巡视的安全风险,还使得后续缺陷分析的难度加大。为有效地解决上述问题,本文基于输电线路精细化巡检的内容和要求,采用智能飞行控制技术和机器学习算法,自主研发了一款针对输电线路无人机精细化巡检的自动驾驶系统,以减少人工操作,降低职业门槛,保证飞机的飞行安全,减少事故率,实现无人机输电线路的自动精细化巡检。
2.输电线路精细化巡检方法及内容
2.1 输电线路精细化巡检方法
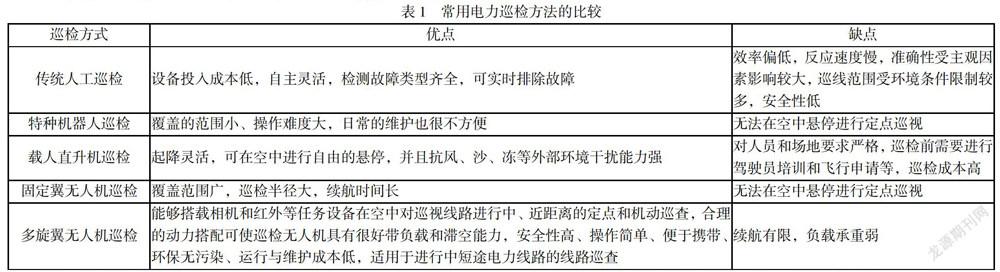
电力巡检是指对电力线路及附属设备的运行状态以及对电力线路走廊周边环境状况进行及时和准确的巡视检测,通过排查发现故障点及危及电力安全的潜在隐患并进行有效排除,确保输电线路安全可靠运行。目前,常用的电力巡检方法有传统人工巡检、特种机器人巡检、载人直升机巡检、固定翼无人机巡检、多旋翼无人机巡检等,各种巡检方法的优缺点对比如下。
通过对比分析可知,将无人机应用于电力巡检,可以大幅度减轻电力巡检方面的各项投入,降低人工成本和劳动强度,提高工作效率,保障作业安全,解决传统巡线中所遇到的困难,有利于推动智能电网数字化建设,实现安全、高效、精细、经济的电力巡检目的。电力巡检主要包括线路外界环境巡视、线路通道巡视、线路设备巡视等。其中线路设备巡视包含杆塔基础、接地装置、杆塔本体、导地线、绝缘子、金具及附件、标志牌等非常多的设备部件,为了保证这些部件的良好状态运行,需要线路运维工作人员对这些设备进行精细化巡视,发现缺陷、及时检修、消除隐患。由于线路设备主要分布在铁塔和导地线上,需要运维巡检人员翻山越岭到达塔位、导地线下,爬上铁塔逐一查看,工作量极大。
多旋翼无人机能够搭载相机和红外等任务设备在空中对巡视线路进行中、近距离的定点和机动巡查,通过搭建自主研发的RTK高精度定位模块,可实现输电线路的精细化巡检。该方法灵活、快速、安全性高、操作简单、便于携带、环保无污染、运行与维护成本低、不受地形、环境等条件制约。因此本文采用多旋翼无人机进行输电线路精细化巡检的研究,具体参数如下。
2.2 输电线路精细化巡检内容
无人机技术的发展大大减轻了电力巡检人员的作业负担,通过多旋翼无人机精细化巡检可以清楚判断输电线路的重要部件是否受到损坏,保证输电线路的安全,保障居民用电。多旋翼无人机精细化巡检通常用于220kV及以上输电线路的架空输电线路巡检,主要巡检方式为拍照、录像等,巡检对象为线路本体、线路附属设备、杆塔本体和塔上附属设备。巡检内容具体如下:1)输电线路本体导地线损伤、松股、断股、跳股、补修、绑扎、线松散、弧垂偏差过大等;2)杆塔本体倾斜、倒塌、塔材被盗缺失、塔基灾害、移动等;3)塔上线路金具线夹断裂、裂纹、磨损、销钉脱落或严重腐蚀;均压环、屏蔽环烧伤、螺栓松动;防震锤跑位、脱落、严重锈蚀、阻尼线变形、烧伤;间隔棒松脱、变形或离位;各种连扳、连接环、调整板损伤、裂纹等;金具锈蚀、变形、磨损、裂纹,开口销及弹簧销缺损或脱出;4)塔上绝缘子与瓷横担脏污,瓷质裂纹、破碎,钢化玻璃绝缘子爆裂,绝缘子铁帽及钢脚锈蚀,钢脚弯曲;合成绝缘子伞裙破裂、烧伤;绝缘子与绝缘横担有闪络痕迹和局部火花放电留下的痕迹;绝缘子串、绝缘横担偏斜;绝缘横担绑线松动、断股、烧伤;绝缘子槽口、钢脚、锁紧销不配合,锁紧销子退出等;重要交跨是否采用了独立悬挂点的双串绝缘子;5)防鸟装置、监测装置缺失、破损、变形、螺栓松脱等。
多旋翼无人机精细化巡检分为正常巡检、故障巡检和特殊巡检。其中,正常巡检主要对输电线路导线、地线和杆塔上部的塔材、金具、绝缘子、附属设施、线路走廊等进行常规性检查。巡检时根据线路运行情况、检查要求,选择性搭载相应的检测设备进行可见光巡检、红外巡检;故障巡检主要是线路发生故障后,根据故障信息,确定重点巡检区段和部位,采用无人直升机查找故障点及其他异常情况;特殊巡检主要是根据季节特点、设备内外部环境及特殊生产需要做出的加强性、防范性及针对性巡检,如鸟害巡检、树竹巡检、防火烧山巡检、外破巡检、灾后巡检等。除正常巡检、故障巡检、特殊巡检外,还可将无人机应用在电网灾后故障巡检。当灾害导致道路受阻、人员无法巡检时,无人机可以发挥替代作用,开展输电线路巡查,准确定位杆塔、线路故障,且视角更广,能避免“盲点”。无人机巡检提高了电力维护和检修的速度和效率,使许多工作能在完全带电的情况下迅速完成,比人工巡检效率高出数十倍。
2.3 输电线路精细化巡检要求
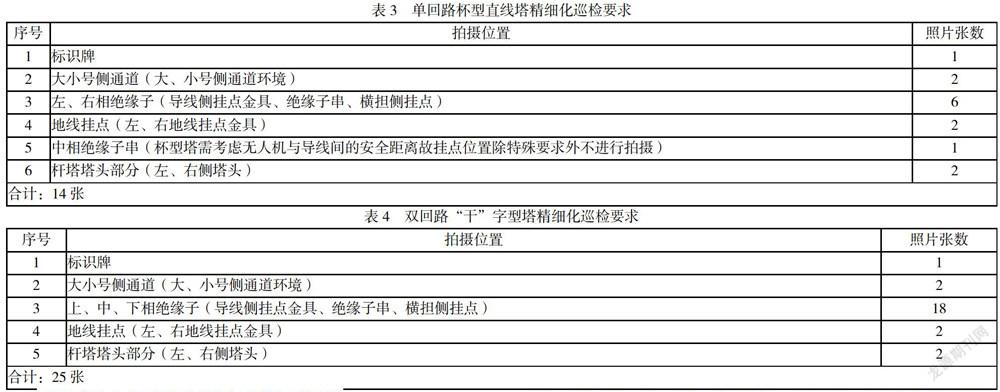
多旋翼在保证最小安全距离的情况下,通过无人机对杆塔各个巡检部位进行可见光拍摄,照片像素为2400万,最终成像效果能清晰分辨出螺栓及开口销细节。根据架空输电线路实际运行情况,结合不同塔型作业经验,本文将架空输电线路精细化巡检的照片数量划定为单回路直线塔至少14张、单回路耐张塔至少27张、双回路直线塔至少25张、多回路耐张塔至少40张、单回路换位塔至少30张、双回路换位塔至少50张。下面仅以单回路杯型直线塔(表3)及双回路“干”字型塔为例详细说明拍摄部位及巡检效果(表4)。
3.输电线路无人机精细化巡检自动驾驶系统研发
输电线路无人机精细化巡检通常采用人工操作RTK高精度定位多旋翼无人机的方式进行,但由于人为操作的影响,无人机的拍摄位置、高度很难准确地到达指定位置和高度,每次的拍摄质量因人而异,规范性较差,受到人员操控技术的限制,拍摄的部位、顺序等均会有较大差异,这不仅增加了巡视的安全风险,还导致后续缺陷分析的难度加大。为有效地解决上述问题,本文基于输电线路精细化巡检的内容和要求,采用智能飞行控制技术和机器学习算法,研发了输电线路无人机精细化巡检自动驾驶系统。
输电线路无人机精细化巡检自动驾驶系统是基于Android移动操作系统和大疆SDK自主研发的、针对输电线路精细化巡检的作业特点深度定制的无人机自动驾驶系统。系统首先采用智能飞行控制技术人工操控无人机进行精细化巡检,无人机控制程序将自动记录人工操控无人机巡检的起飞位置、杆塔部位的选定位置、拍摄角度等全过程信息,详细记录巡视路径节点,并通过优化处理剔除无效飞行,优化拍摄方法,调整每个位置相机方向、角度、拍摄顺序,删除多余拍摄,形成每个点位的最佳采集方案,存贮在系统中,形成机器学习的全自动化杆塔精细化空中飞行巡视采集作业流程。后续可通过程序控制实现无人机自动进行输电线路的精细化巡检,实现无人机的自动化、智能化操作控制,減少人工操作,降低职业门槛,保证飞机的飞行安全,减少事故率。此外,还可以一个架次巡视多基铁塔,实现超视距飞行,避免依靠人工视觉定位。系统功能分为数据采集、模式切换、任务管理和飞行记录四大模块,具体功能如下。
3.1 数据采集模块
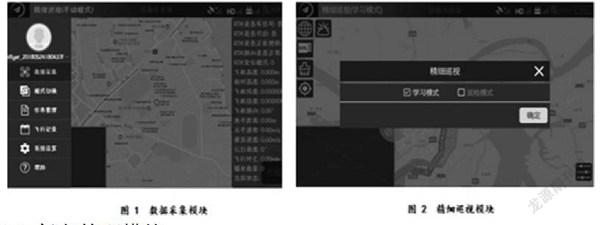
数据采集模块主要用于精细化巡检作业的显示,内置Google地图和高德地图两种互联网主流地图,每种地图均包含常用路网地图或卫星影像地图,可通过地图切换完成转换显示。提供快速定位功能,当设备连接时,定位功能进行的是无人机定位;当设备未连接时,定位功能进行的是手机定位。在无人机的飞行过程中,可实时显示无人机在飞行过程中的位置、视频以及各种姿态参数等信息,并提供GPS信号强度、卫星数量、图传信号强度、遥控器信号强度、电量、云台角度、飞行高度、飞行距离、飞行速度、垂直速度、飞行时长、曝光数量、曝光补偿、相机模式等参数的显示功能。此外,还提供实时天气预报功能和禁飞区提示功能(图1)。
3.2 精细巡视模块
精细巡视模块分为学习模式和巡检模式。学习模式可以记录飞行的轨迹和拍摄位置,记录下来的信息将会在巡检模式中作为飞行依据,而巡检模式可以按照学习模式记录下来的信息进行自动飞行。该模块具备KML或者Excel格式的杆塔坐标位置导入功能,可以新增杆塔、追加杆塔、删除杆塔、保存单点杆塔的飞行路径,还可同时保存多个杆塔的飞行路径,并将其保存为KML文件。为确保每个巡视人员能够安全操作无人机进行精细化巡视,可以在学习模式下由有经验的巡视人员先控制无人机进行巡视,完成之后由其他的非专业巡视人员在巡检模式下按照学习模式记录的轨迹和拍照位置进行自动化巡检(图2)。
3.3 任务管理模块
任务管理模块用于记录所有飞行任务的名称、日期、高度、重叠度、航线规划以及完成状态,支持任务的预览、删除、编辑、上传、断点续飞等功能。提供影像预览、上传图像、拼接图像、删除任务等功能,可以通过蓝牙将任务的信息同步到其他移动端,也可以将影像数据上传到云端或者传输到深度影像处理系统中进行处理(图3)。
3.4 飞行记录模块
飞行记录模块具有飞行记录预览、飞行信息统计、飞行记录查看、飞行记录删除等功能,可查看每次飞行任务的日期、经度、纬度、里程、飞行时长等基本信息,提供该架无人机的总飞行时间、里程、次数等统计信息,并可浏览、删除飞行记录(图4)。
4.输电线路无人机精细化巡检自动驾驶系统应用
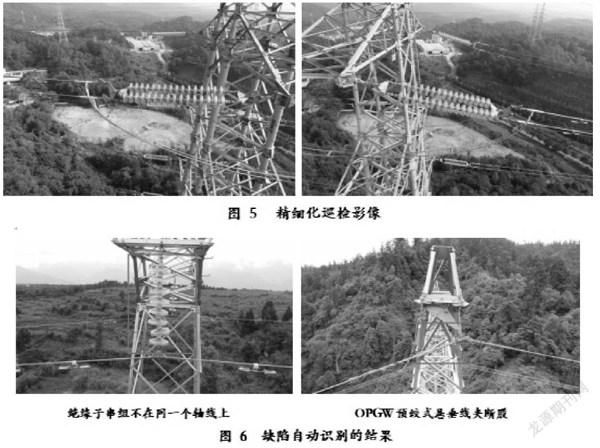
基于多旋翼无人机,利用研发的输电线路无人机精细化巡检自动驾驶系统,在广东省广州市黄浦区冲坑尾对某220KV的输电线路进行精细化自动巡检测试应用,获取的精细化巡检影像如图5所示。输电线路精细巡检数据的获取是进行杆塔缺陷隐患分析的前提和基础,将本文获取的精细化巡检数据应用于杆塔的缺陷隐患分析中,可实现缺陷隐患的自动识别与分类,缺陷自动识别的结果如图6所示。
结果表明,输电线路无人机精细化巡检自动驾驶系统具有高精度定位、航线自动规划、一键起飞、自主作业、自动返航、断点续飞、智能避障等特点,可有效地完成精细化的输电线路无人机巡视作业,保证作业安全。利用无人机自动驾驶系统采集得到的影像数据质量好,距离杆塔近,能够清楚的展示杆塔的部件信息,将其应用于缺陷隐患识别软件中,可实现缺陷的自动识别,具有较高的效率。由此可知,本文研发的输电线路无人机精细化巡检自动驾驶系统对于无人机输电线路的精细化巡视作业具有良好的适用性。
5.结论
本系统具有高精度定位、航线自动规划、一键起飞、自主作业、自动返航、断点续飞、智能避障等特点,可有效地解决受无人机飞手水平影响而造成的拍摄位置、高度、质量、顺序等不一致的问题,保障作业安全。输电线路无人机精细化巡检自动驾驶系统具有数据采集、模式切换、任务管理和飞行记录四大模块,可自动记录人工操控无人机巡检的起飞位置、杆塔部位的选定位置、拍摄角度等全过程信息,详细记录巡视路径节点,形成每个点位的最佳采集方案,并存贮在系统中,形成机器学习的全自动化杆塔精细化空中飞行巡视采集作业流程。利用输电线路无人机精细化巡检自动驾驶系统对在广东省广州市黄浦区冲坑尾某220KV的输电线路进行精细化自动巡检测试应用。结果表明,利用无人机自动驾驶系统采集得到的影像数据质量好,距离杆塔近,能够清楚的展示杆塔的部件信息,将其应用于缺陷隐患识别软件中,可实现缺陷的自动识别,具有较高的效率。
参考文献:
[1]吴洪昊.基于电力巡检的无人机导航系统[D].安徽理工大硕论,2017.
[2]王志刚.旋翼无人机应用于高压输电线路的巡检[J].技术与市场,2018(10):140-141.
[3]李建峰等.无人机在输电线路巡检中的应用[J].电网与清洁能源,2017(08):62-65.
[4]刘典安.输电线路无人机巡检作业管理系统[J].农村电气化,2017(08):46-47.
[5]程耀鸿等.无人机巡检精细化管理[J].中国新技术新产品,2016(19):120-121.
作者简介:
陶雄俊(1983-),男,汉族,湖北孝感市人,学士学历,中国南方电网有限责任公司超高压输电公司昆明局输电管理所班长,主要研究方向:特高压直流输电线路运行与维护工作。
(作者单位:1.中国南方电网有限责任公司超高压输电公司昆明局;2.广州地理研究所)