一种空管二次雷达性能测试系统的设计与实现
2019-09-10谢东颖
【摘 要】提出一种空管二次雷达性能测试系统,该系统通过PCI结合DMA的方式实现对天线信号的引接及传输,最终在终端PC机上通过C#编程对数据进行分析和显示,得出具体的雷达性能数据及相关曲线图。系统占用资源少,可以部署在笔记本电脑,为空管二次雷达的技术保障提供一种技术手段。
【关键词】二次雷达;性能测试;空管;C#
1 引言
空管二次雷达是当前空管系统主要的探测设备,其能够为管制自动化系统提供稳定可靠的目标信息。通常,一套即将投入运行的二次雷达需要经过多个步骤的测试,测试需要的设备和仪器也较为复杂,而且在运行过程中,相关标准还给予了定期维护、检修的具体要求,这对于一线技术保障而言是一项必须按时、按量、按质完成的基础工作。本文从实际出发提出一种二次雷达天线测试系统,该系统能够在二次雷达不停机的情况下接受雷达发射的询问信号实现对雷达的相关参数进行测量,提高技术保障效率。
2 系统总体设计
系统主要组成为测试天线、下位机、终端PC机。通过部署测试天线接收二次雷达L波段射频信号进行分析,下位机利用PCI结合DMA方式实现数据的完整传输,通过终端PC机进行雷达抗干扰、抗混叠处理,并最终实现雷达天线信息的动态显示(主要绘制天线水平方向图及测试结果,智能检测天线增益、计算馈线插损以及发射机功率等参数)。为了进行模数转换,PCI采用PCI1714高速数据采集卡,转换完毕的数据将存于板载FIFO中,当数据量达到50%时系统将会对DMA发送请教并通过内存存取直接将数据传输到终端PC机中。
3 设计的关键
3.1 数据采集软件模块设计
数据采集分析主要由波形检测、数据采集及DMA數据处理组成。其中,数据采集顶层将会接收DMA处理模块反馈的信息控制前两者的参数设置。
在数据的处理流程上,系统首先进行设备的初始化设置,并通过调用函数的形式使能事件通知,采用函数开启高速数据采样。整个过程,系统同时检测当前事件类型,判断缓存区是否达到50%容量,如若是则进行数据传输,反之则返回到高速数据采样步骤。本次数据采集传输完毕后(收到停止位)系统将循环继续执行下一次高速数据采样。系统在软件数据处理过程中,需要将设备句柄指向具体设备,并为DMA传输分配内存资源,释放空间则可以通过函数进行句柄空间释放。
正常工作时,在机场附近系统容易出现同时检测到多部二次雷达信号,因此必须对其他非检测的雷达信号进行去除。此处可以通过动态门限滑窗检测的方法计算出雷达周期内的动态门限值,获得有效脉冲信号序列,进而去除异步干扰信号得到关注的二次雷达信号序列。
系统统计一段时间内的数据值求出生成动态门限值,通过比较采样值和门限值确定脉冲的位置和宽度,检测具体的上升沿和下降沿,精确获取脉冲的位置和宽度,再进行数据滤波得出幅度值。在去除异步干扰上,系统可以任意取一个有效的脉冲信号,判断其是否为异步干扰脉冲,通过幅度值及初始化的P1、P2、P3的时间关系计算出动态门限并进行前后检测,如若有匹配的脉冲则判断其为异步干扰。在脉冲分组提取上,系统可以选取一个有效脉冲,并遍历获取到的数据进行是否有匹配的有效脉冲判断,如若有,则判断该脉冲为P1并同时确定P2和P3,将三者记录为某一雷达有效脉冲信号分组序列。当然,为了得到尽可能高的门限值,提高判断的性能,计算门限需要设置一个较大的脉冲重复周期,采用滑动方式即可,针对采取处理的数据长度并不需要过长的设置。
综上所述,系统在多雷达信息提取上,需要在多雷达信息中提取完整的每部雷达信息包括询问信号的主瓣宽度以及脉冲重复频率。设计上首先进行选择分组序列,判断P1和P3是否有幅度和时间的一致性,如若有则提取主瓣脉冲的具体位置和幅度信息进行多雷达的区分,实现对非主瓣分组标定和最佳主瓣(功率值最大,代表了雷达的发射功率)的提取。另外,雷达的天线旋转周期则可以根据检测两个同属一部雷达的最佳主瓣之间的时间间隔确定。
3.2 终端PC机软件的设计
终端PC机软件设计主要分为网络接收模块、数据分析模块和图形绘制模块。为提高开发效率,系统通过协议转换器,将数据转换为网络数据。实现上首先通过网络模块接收接收来自前端的数据,并将其提交给数据分析模块进行内部数据格式分析。数据分析模块则将分析结果进行数据显示以及提交绘制参数数据给绘制模块,最终在绘制模块中实现对界面曲线的绘制。实现中,数据单元将以具体雷达识别为准,建立其雷达天线数据性能列表,绘制模块只需要遍历具体的列表则可以快速绘制曲线图。为了开发便捷,雷达天线数据将建立天线类,C#对该类进行属性定义,后续的操作将转换为对天线类的对象的具体属性的操作。类的引入为程序的后期扩展和升级提供了良好的接口。而对于具体的曲线绘制,系统可以利用C#提供的丰富的系统函数进行,在C#中基础绘制函数部分代码如下:
Bitmap B = new Bitmap(1920,1080);//定义画布的大小
Graphics G = Graphics.FromImage(B);
FuncDrawBasePic(ref G);
FuncDrawDynamicPic(ref G);
Graphics g = Graphics.FromHwnd(MyBox.Handle);
g.DrawImage(B,new Point(0,0));//在内存中画完后显示在控件上,避免闪烁
4 测试效果
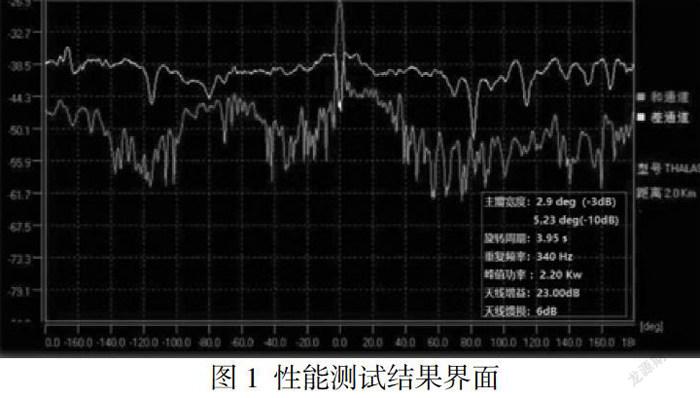
此处以民航汕头空管站梅岗山Thales二次雷达为例,在距离其20KM左右的测试点进行测试,得出天线,软件测试结果界面如图1所示。可以看出,该雷达在-3dB和-10dB的主瓣宽度分辨为2.9deg和5.23deg,天线的旋转周期为3.95s,峰值功率为2.2KW,天线增益为23dB,线损为6dB,与厂家给出的整机性能测试指标要求一致。
5 结束语
本文从实际出发,提出一种空管二次雷达性能测试的方案,并通过部署PCI结合DMA的方式实现数据的接收和发送,最终通过C#编程实现了终端PC对性能参数的获取和显示,为空管二次雷达的技术维护和保障提供一种手段。
参考文献:
[1]基于分布式计算的雷达显示系统设计[J].曾培彬.北京联合大学学报.2013(01)
[2]探究航管二次雷达天线测试系统的实现[J].陈兵.通讯世界.2017(17)
作者简介:
谢东颖,1995年3月,男,汉族,本科学士,助理工程师,研究方向:雷达信号处理。
(作者单位:民航汕头空管站)