电动助力转向系统转向性能的客观评价
2019-09-10丁玲
丁玲

摘要:在国外,电动助力转向 (electric power steer-ing ,简称 EPS)已部分取代液压动力转向 (hydraulicpow er steering ,简称 HP S) ,并已成为汽车技术发展的研究热点。 汽车电动助力转向与液压动力转向在技术上有很大的区别,其对转向轻便性、转向回正性等带来了新的影响。因此,传统的液压动力转向评价指标已不能完全适用于电动助力转向,有必要建立一套电动助力转向系统性能评价指标,用于指导电动助力转向助力控制规律和基本设计参数的确定等
关键词:电动助力转向系统;转向轻便性;转向回正性
1电动助力转向的结构特点
在液压动力转向系统中,选定参数完成设计之后,动力转向系统的性能就确定了,不能再对其进行调节与控制。因此传统的液压转向系统难以兼顾汽车低速行驶转向性能和高速行驶转向性能,若原地转向力小,高速行驶时转向力往往会过轻、“路感”差,而按高速性能要求设计转向系统时,低速时转向力往往过大。
折衷方案设计结果是低速和高速性能都不太理想。EPS由电动机提供助力,助力大小由电控单元(ECU)实时调节与控制。所以EPS能在各种行驶工况下提供最佳助力,减小由路面不平引起的对转向系统的扰动,改善汽车的转向特性,减轻汽车低速行驶时的转向操纵力,提高汽车高速行驶时的转向操纵稳定性,进而提高汽车的主动安全性。
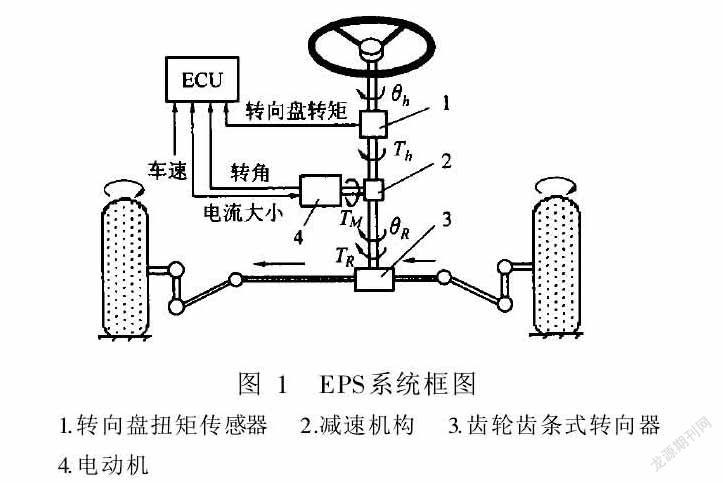
EPS系统框图如图1所示。其基本原理是:扭矩传感器与转向轴(小齿轮轴)连接一起,当转向轴转动时,扭矩传感器把输入轴和输出轴在扭杆作用下產生的相对转动位移变成电信号传给ECU,ECU根据车速传感器和扭矩传感器的信号决定电动机的旋转方向和电流的大小,从而完成实时控制助力转向。因此它可以很容易地实现在车速不同时提供电动机不同的助力效果,保证汽车在低速行驶时轻便灵活,高速行驶时稳定可靠。
2EPS对转向性能的影响
2.1 转向轻便性
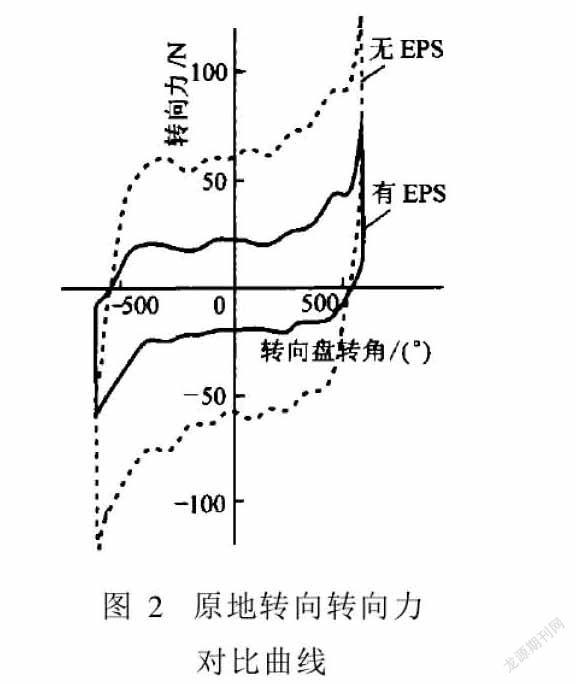
EPS的基本目标是提高汽车停车泊位和低速行驶时的转向轻便性,以及高速行驶时的操纵稳定性。图2是Alto车原地转向的转向力对比曲线[1],EPS为转向柱助力式,前轴负荷为4kN,电动机最大电流为20A。由图可知,装有EPS后,原地转向的转向力下降40%
2.2 转向回正性
通过指定合适的控制策略,EPS能显著提高汽车转向盘的回正特性。
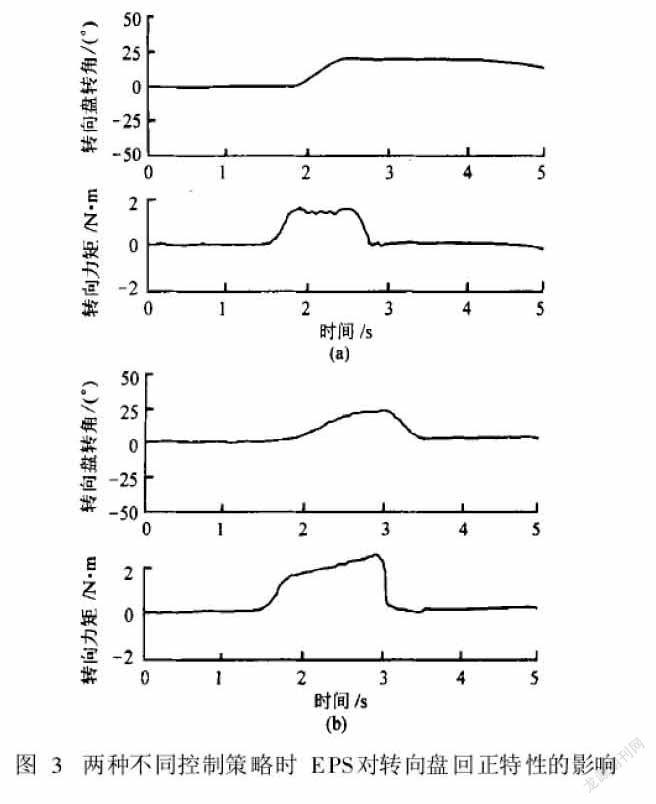
图3是汽车在30km/h左右行驶时的回正特性试验结果。试验中,微小转动转向盘后松开。图3a和图3b分别是EPS采用两种不同控制策略时的转向盘回正性测试结果。图3a表示转向盘卡住了,不能回到中间位置。图3b表示在松开转向盘后,转向盘能立刻回到中间位置。
2.3 操纵稳定性
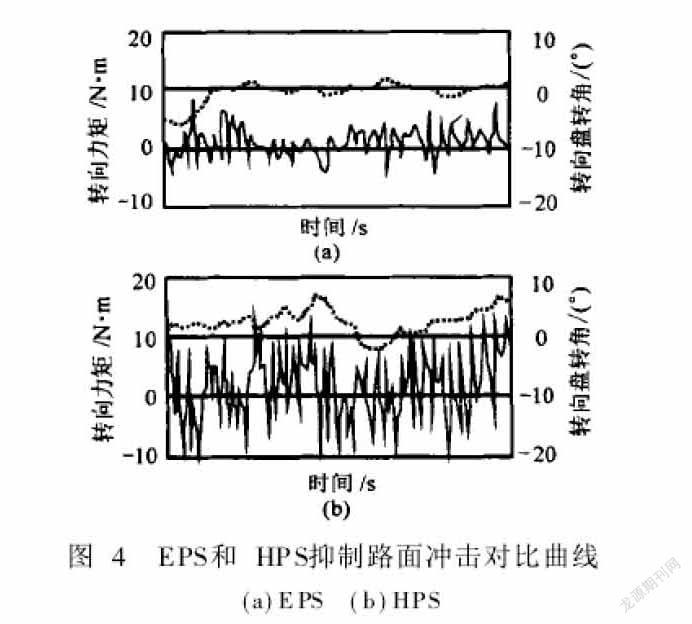
由于电动机具有弹簧阻尼的效果,EPS能减小不平路面对转向盘的冲击力和车轮不平衡质量引起的振动,图4a、4b分别是EPS和HPS抑制路面冲击能力的对比曲线,曲线表明在相同的路面冲击下,EPS的转向盘转角和转向力矩的振动幅值比HPS都有明显降低。
3EPS转向性能的客观评价
3.1 转向轻便性评价
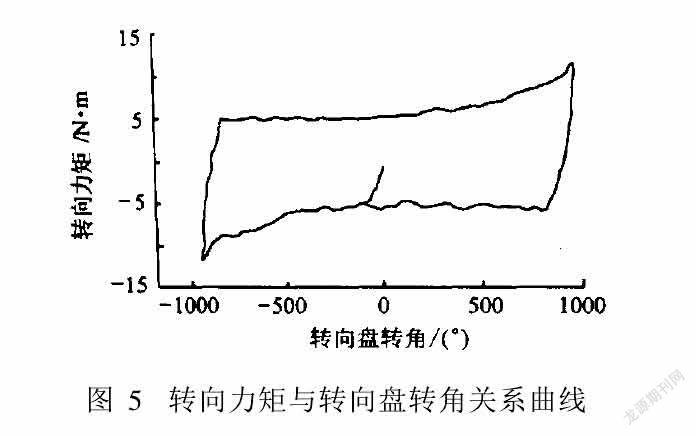
提高转向轻便性是电动助力转向的首要目标。在我国汽车行业标准QC/T480—1999中,采用了转向盘平均操舵力Fs(N)和最大操舵力Fm(N)两项指标来评价转向轻便性。此两项指标也适用于评价EPS的转向轻便性。图5是典型的转向力矩与转向盘转角的关系曲线,从图中可得到作用在转向盘上的平均操舵力和最大操舵力。
3.2 转向回正性评价
转向后转向盘应能自动回正,使汽车保持在稳定的直线行驶状态,这是汽车对动力转向的要求之一。转向机构中的摩擦力矩会降低转向盘的回正特性,常使驾驶员感到不舒适。动力转向在转向盘有转向力矩作用时才开始工作,除此之外,动力转向还必须满足在没有力矩作用在转向盘时的行驶要求。其一是在高速行驶时转向后松开转向盘的稳定性,其二是在高速行驶情况下微小的转向盘转动或车速相对较低情况下正常转向以后的转向盘回正特性。
根据我国汽车行业标准QC/T480—1999,可采用松开转向盘3s时的残留横摆角速度绝对值Δr((°)/s)和横摆角速度总方差Er(s)两项指标来评价转向回正性,此两项指标也适用于评价EPS的转向回正性。
3.3 转向盘中间位置区域性能评价
评价转向性能有一个重要的因素是转向盘中间位置区域的操纵性。转向盘中间位置区域的操纵性包含移线操作时的感觉和为精确跟随线路进行必要的转向调整时的感觉。为评价转向盘中间位置区域转向操纵,“转向力矩梯度”和“转向盘回正特性”非常重要。转向力矩梯度是转向力矩对汽车侧向加速度的微分,转向回正特性包含转向力矩为0时的侧向加速度。转向力矩梯度越大,转向回正特性越小,驾驶员的转向感觉就越好。
通过转向盘中间位置区域试验可得到与电动助力转向相关的两条曲线,即转向盘中间位置区域的转向力矩与侧向加速度关系曲线(见图6)、转向力矩与转向盘转角关系曲线(见图7)。
3.4 转向盘振动评价
路面不平度和电动机力矩波动往往会引起转向盘振动,这会使驾驶员感到紧张和疲劳。路面不平度引起的振动通常是高频振动,而电动机力矩波动引起的转向盘振动一般在低转速和低频时发生。特别是对转向柱助力式电动助力转向,由于电动机布置在转向轴上,电动机力矩波动更易造成转向盘振动。转向盘振动试验可以用转向力矩峰值、转向力矩均方根值、转向盘角加速度均方根值3项指标来评价。
3.5 随动灵敏度评价
随动灵敏度可以用开始助力时作用到转向盘上的手力和转角来评价。对液压动力转向,要求此力为20~50N,转角为10°~15°。这可以为电动助力转向提供参考。
3.6 助力特性评价
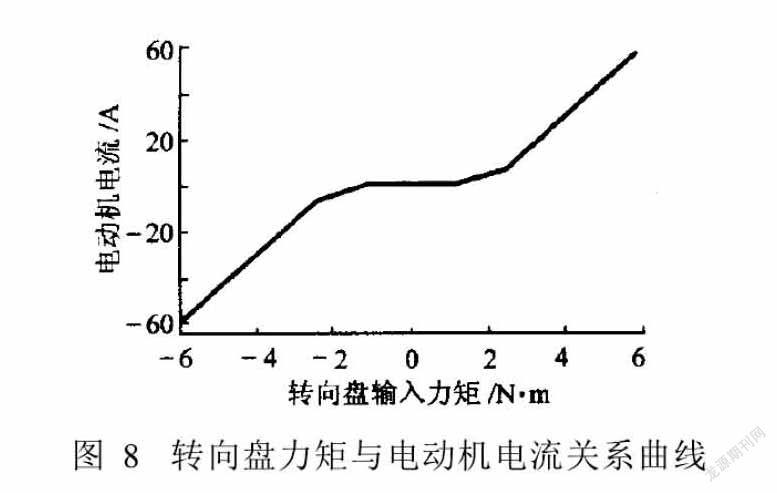
电动助力转向的助力特性是指在一定车速下,转向盘输入力矩与电动机输出力矩之间的变化关系。因为电动机输出力矩可以用电动机电流来表示,所以可以用一定车速下,转向盘输入力矩与电动机电流之间的变化关系来表示助力特性,如图8所示。这种助力特性反映了助力效果,同时也反映出路感强度。
4结论
本文通过对电动助力系统结构特点分析,通过与传统液压助力转向系统的对比,总结电动助力系统对转向性能的影响,最后,在转向轻便性、转向回正性、转向盘中间位置区域性能、转向盘振动、随动灵敏度、助力特性方面给出了评价方法,为进一步标准实施给予了理论指导方向,具有实际意义。
参考文献
[1] GB/T6323.5-94.汽车操纵稳定性试验方法一转向轻便性试验[S].
[2] GB/T6323.4-94.汽车操纵稳定性试验方法一转向回正性能试验[S].
[3] 李绍松.基于转向性能的电动助力转向控制参数灵敏度分析及优化[D].长春:吉林大学,2013.
[4] 郑虎,周中坚.汽车电动转向系统用驱动电机现状及其发展[J].上海汽车,2011(2):36-41.
[5] 宋贵勇,张洪欣.常规转向系统的路感特性及其改善途径[J].上海汽车,2000(5):17-33
[6] 晋兵营,宁广庆,施国标.汽车电动助力转向系统发展综述[J].拖拉机与农用运输车,2010,37(1): 1-5.