智能家居类人机器人
2019-09-10马春杰丁学文黄健徐麒麟高茂华
马春杰 丁学文 黄健 徐麒麟 高茂华





【摘 要】近年来,类人机器人也在快速发展并在较多领域得到开发应用,据此本课题旨在开发一款能够通过红外遥控的智能多自由度家居类人机器人。本设计以STC12C5A60S2芯片为核心搭建机器人的控制系统,通过装载17个SH14-M舵机来实现机器人的多自由度,通过对机器人的步态规划进行机器人动作设计,最后利用红外遥感技术进行遥控,实现了机器人的行走、转向、跳舞等多种动作。
【关键词】智能;类人机器人;步态规划;伺服舵机;红外遥控;
1.引言
现今,随着微电子技术的更新与发展,类人机器人的钻研范围一直在扩展,起初类人机器人只能模仿人类的肢体动作,到现在去研究类人机器人模仿人类的听觉、视觉、嗅觉,甚至通过AI智能芯片模仿人类分析事物。早在2000年本田公司宣布推出名为Asimo的行走机器人,它的运动能力与范围具有更高的实现性。此外,我国研制的“汇童”仿人机器人取得了重大成果,目前已推出第5代。国内外的家居类人机器人也正在研发当中,只是还没有得到广泛应用,本课题设计了一款家居类人机器人,可以放松人们的生活,具有很好的应用前景。
2.机器人机体机械结构原理与设计
2.1加藤一郎结构
对于机器人的机体结构设计,本课题是参照加藤一郎结构体来进行的。加藤一郎结构体,顾名思义,就是加藤一郎教授在1966年提出的一种仿人形机器人机体结构,其将机器人分为头、躯干、四肢三个部分,经过简化和建模,形成了机器人的基本结构并一直延续至今,因此在学术界中习惯称该机体结构为“加藤一郎结构体”,加藤一郎教授也因此被称为仿人形机器人之父。
2.2机械结构原理
如同人类一样,类人机器人也拥有关节,其中腿部关节是最为关键的一部分,因为机器人的翻转、舞蹈、行走等动作要靠它来完成。本课题机器人腿部示意图如图1所示。在机器人学中,将机器人的关节称作“自由度”,其代表机器人所拥有的关节的数目,多自由度即是代表着机器人可以较大程度的满足需求,做出更加复杂的动作。实际设计时,用伺服舵机代替机器人的各关节,伺服舵机既是机器人移动的驱动力,也是平衡信息的收集器,伺服舵机内置有位置探测器,可以检测到舵机自身的平衡信息,并实时传送给控制系统,然后控制系统会计算出使机体平衡时对应的调节量,再发送回来给舵机,最后舵机根据数据进行调节,经过多个舵机之间良好的统筹规划,就能控制好机器人在进行行走或者其他动作时的平衡状态。
在机器人的运动中,自调节能力起到了至关重要的作用,其中,零力矩点ZMP(Zero Moment Point)的应用起到了至关重要的作用,它会使机器人在受力运动中帮助机器人寻找到合适的落脚点。

3.系统硬件设计

本课题采用的主控硬件是STC12C5A60S2单片机,并以红外遥控作为人机交互方式的一款多自由度人形机器人,STC12C5A单片机具有更强大的功能,使机器人的运行动作更为敏捷和精确,另外通过红外遥控器选择机器人要进行的动作,按下按钮进行不同动作之间的切换。系统组成框图如图2所示。
3.1 STC12C5A60S2控制板
STC12C5A60S2为宏晶科技生产的新一代51单片机,和 旧一代51单片机相比,它的功耗更低,运行速度更快,此外,并具有超强抗干扰能力,对于内部结构,它集成了MAX810專用复位电路,内置2路PWM方波,更是针对这一特点,我们更能将其运用到本课题的类人机器人当中。

3.2伺服舵机
舵机,又称伺服电机,在本设计中作为机器人关节的扭动力,其原理是管制信号通过调制芯片来获得一个直流稳压电源,这个直流稳压电源与电位器的基准电压相比较,得出的比较量会使电机驱动芯片产生一个电压差从而决定电机是正转还是反转。扭力和转速是舵机很重要的两个性能指标,其中扭力是指舵机使物体产生扭转形变的力,而转速则是舵机从一个位置到另一个位置所需的时间,一般来说舵机的控制结果由PWM信号决定,PWM是脉冲宽度调制的缩写形式,工作原理为:经过脉冲的宽度的调制效应,等效出一定形状及幅值的波形,最后通过调节占空比,使机器人输出正确有效的动作。本课题选用的是SH14-M舵机,它是专业的小型伺服电机,重复定位准确,旋转迅速。制作小型人形机器人,要求舵机的扭矩达到10kg.cm以上,SH14-M数字舵机能够完全满足这个要求。

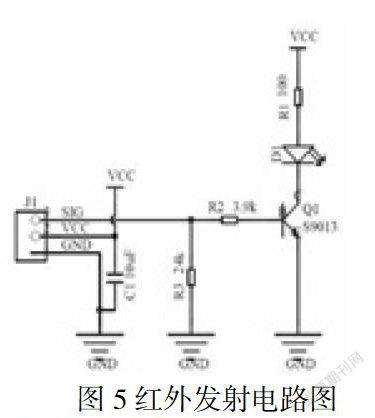
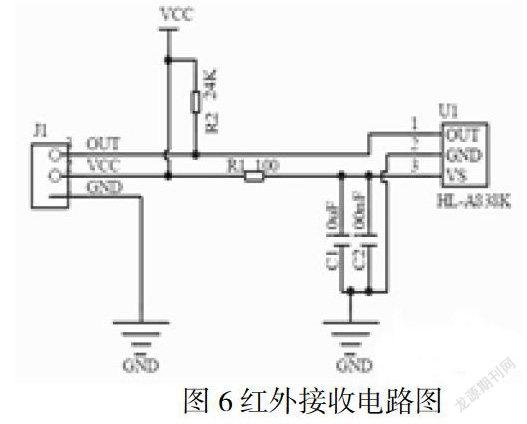
3.3红外遥控模块
红外发射模块:电源3.3V或5V,通过发射管发射38KHz的红外信号,高电平驱动红外接收模块:电源3.3V或5V,可接收红外信号,并解调成逻辑电平,低电平有效。


4.系统软件设计
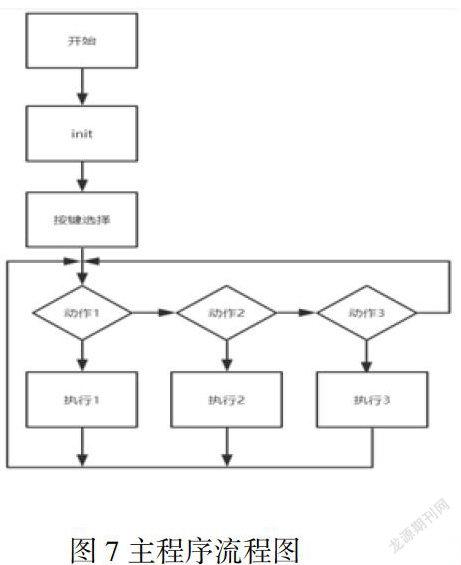
4.1主程序设计
本设计软件采用keil软件编译,用C语言编程,再烧录到单片机中进行调试。本设计通过红外遥控按键选择机器人要进行的动作,操作方简单。图7为机器人主程序流程图。上电以后,程序进行初始化,然后通过按键选择行走、蹲下、前滚翻等动作,机器人接收到指令,就会按照指令执行。
机器人的头部、手臂、腿部关节均是由伺服舵机驱动。头部扭转,手臂摆动相对而言较简单。腿部结构是舵机数量较多也是较为复杂的,不论是在硬件组装还是程序设计上都下了较大功夫。其中,行走又是最为基本的动作,因此下面重点介绍一下行走子程序。

4.2行走程序设计
首先机器人需要先执行一段下蹲程序,原因是下蹲状态的重心会下移,对于机器人的平衡有很大的帮助。
其实人类在行走的过程中,第二步的步伐长度实际上是第一步步伐长度的两倍,因此本课题将机器人的行走姿势设计成如同人类一样,即行走开始后左腿先迈出半步,这半步与左腿前进一步相比,前进过程是相同的,但是步伐是后者的一半。
紧接着是右腿前进一步和左腿前进一步,前进步伐的大小取决于积分步数。这两步循环N遍,N即是控制系统设定的前进的步数。
当循环次数达到后,即机器人走完设定的步数后,右腿需要跟进半步,因为在行走刚开始的时候,左腿前进了半步,右半步的步伐长度和左半步相同。最后,机器人起立流程与下蹲正好相反。

5.结论
类人机器人是基于STC12C5A60S2设计的一款多自由度,由舵机以及PWM方波控制的机器人,其运行十分高效并有较大的实用性。通过PWM方波的精確计算,机器人各个关节的扭转角度也在控制范围之内。此外,红外遥控器的设置使其在家庭使用中更为方便,其多种运行动作在家居娱乐方面做出了很大贡献,在家居使用的开发中具有开阔的前景。
参考文献:
[1]黄荣怀,刘德建,等.教育机器人的发展现状与趋势[J].现代教育技术,2017,27(01):13-20.
[2]黄智全,李立锋,等.红外遥控器控制智能设备的自编程方法[J].电子质量,2018(08):37-40.
[3]李亚龙.浅析红外遥控技术的有效应用[J].科技风,2018(33):73-74.
[4]汤纯,刘柏春,等.红外传感遥控器实验的教学设计[J].物理与工程,2018,28(S1):81-83.
[5]朱玮,魏春燕,等.基于偏差补偿辅助变量法的舵机参数辨识[J].电子设计工程,2013,21(20):85-87.
[6]张照磊.基于STC12C5A60S2单片机教学用机器人控制系统设计[D].苏州大学,2017.
作者简介:
马春杰,女,天津市人,天津职业技术师范大学本科学生。
(作者单位:1.天津职业技术师范大学电子工程学院;2.天津市高速铁路无线通信企业重点实验室)
