大跨度悬挑梁脚手架支撑体系有限元分析
2019-09-10陈顺霖陈信堂陈东
陈顺霖 陈信堂 陈东


摘要:近年来,越来越多造型独特的非常规建筑被设计和使用.为保证结构的稳定安全,利用ABAQUS有限元软件,对某悬挑长度为15.6m的车间悬挑梁,进行有限元模拟.此悬挑梁为预应力混凝土结构,模拟混凝土浇筑成型的过程,并采用生死单元法,实现有限元法对梁拆模及支撑体系的拆卸过程的模拟,分析此梁在实际荷载作用下,混凝土、钢筋及脚手架的应力情况和梁端的竖向挠度变形,确定施工过程中,结构在各工作阶段的薄弱位置,为施工过程中监测点及监测方案提供参考,确保施工结构安全.
关键词:悬挑;应力;有限元模拟;ABAQUS
中图分类号:TU311.41 文献标识码:A 文章编号:1673-260X(2019)05-0096-03
1 工程概况
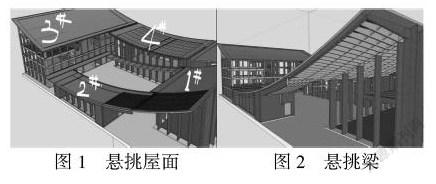
该项目为浙江嘉兴某服装厂车间.其车间2号楼屋面结构独特(图1),仅在一侧设有支撑,利用悬挑梁板和预应力筋向外延伸,形成悬臂结构,使其结构底部成为开敞的空间,该悬挑跨度大,结构设计复杂,结构总高度为19.35m,楼屋面预应力弧形悬臂梁弧线长15.6m,水平悬挑长度为15.25m,共8根悬挑梁(图2).其中楼曲线悬臂梁截面最大面积为一根1000×1400~500mm的变截面梁,其施工集中线荷载超过40kN/m,模板支架属于高支模体系,为满足悬挑结构施工需求,支模架采用盘扣式脚手架,主要材料采用Q345B低合金结构钢,其钢管截面尺寸为Φ48×3.6mm.
悬挑结构主要由水平承托结构承担结构的自重和楼面荷载,外伸悬挑端无多余约束,悬挑固定端易形成塑性铰,可造成结构的倾覆破坏.[1]悬挑结构约束形式单一,端部弯矩,剪力和挠度与常规结构相比较大,且脚手架、模板均为临时体系,其形状、结构、寿命等均随建筑结构而变,具有多样性[2].悬挑结构主体跨度大,主梁下除格构梁之外,无任何墙柱支撑.悬挑最高处约20m,模板支架属高支模体系,混凝土梁拆模及支撑体系拆卸工程中,施工时工况复杂,可能出现结构不均匀变形,需实时监测脚手架应力应变情况,防止支模系统发生坍塌.[3]
2 有限元模拟
为确定结构在混凝土浇筑及拆模过程中,钢筋混凝土悬挑结构的应力情况和梁端竖向挠度变形,以及高支模体系脚手架承载力和不均匀变形情况,取截面面积最大的主梁进行分析.利用ABAQUS有限元软件,模拟现场工况,确定工作阶段薄弱环节,为现场监测提供参考.
2.1 单元选取
使用ABAQUS有限元软件对悬挑结构进行稳定性分析和变形分析.根据设计图尺寸,在AutoCAD软件三维模式中,混凝土梁使用实体单元,底模板采用面单元,钢筋及脚手架选择线单元建立,随后导入ABAQUS软件中.在有限元软件中,采用实体单元定义悬臂梁的混凝土结构,悬臂梁的底膜采用壳单元,盘扣式脚手架和梁中钢筋采用线单元定义.混凝土在网格划分模拟中选择八结点线性六面体单元,钢筋在结构中以受轴向拉力为主,选择两结点线性三维桁架单元分析.悬挑梁底模板,主要起传力作用,与脚手架支撑体系相比,并非主要承重结构,模拟过程中无须考虑其自重及承载能力,因此底模板采用平面薄壳单元定义属性.悬挑梁下部支撑体系为盘扣式钢管脚手架,在自重风荷载以及上部荷载的作用下,可能产生剪力、轴力、弯矩等多种受力情况,故脚手架采用等截面两结点线性空间梁单元分析计算.
2.2 材料本构关系
悬臂梁主体采用C40混凝土,钢筋为HRB400.支撑体系为盘扣式脚手架,采用Q345B圆管钢,悬挑梁底模采用木板材料.具体参数如下表1
2.3 ABAQUS有限元模型建立
有限元计算模型按照设计图纸要求建立(图3).悬臂梁弧线长15.6m,悬挑水平长度15.25米,弧度约为5度,盘扣式脚手架立杆横向间距900mm,纵向间距600mm,悬臂梁下共三排立杆.为保证模拟传力过程与实际施工过程相近,除三排脚手架外,以1.5倍步距在脚手架两侧各建立一排立杆,以立杆顶端各端点为底模壳单元顶点,建立懸臂梁底模板.悬臂梁采用分离式模型建立,箍筋和纵筋作为整体,嵌入混凝土内,钢筋作为线单元,不考虑混凝土和钢筋之间的黏结滑移.底模木板与悬臂梁底部接触部分以及底模木板端点与脚手架立杆顶点均采用绑定约束,脚手架立杆底部设置完全固定约束(图4).为保证计算分析准确网格划分规整,悬臂梁网格全局尺寸为0.1m.
2.4 悬臂梁拆模
为实现悬挑结构由施工状态到正常使用状态的过渡,需模拟梁的拆模过程.悬臂梁为静定结构,其重力起主要控制作用,主要受力钢筋配置在上部结构,应从悬臂梁末端即梁自由端向嵌固端分阶段逐步拆模,与悬臂梁过渡到工作状态的实际过程最相符.[4]在有限元软件中,将梁嵌固端设置完全固定边界条件,使用生死单元法,控制相关单元的“生”和“死”,通过改变结构杆件的刚度矩阵,将其单元“杀死”.[5]在软件中相互作用中,定义型号改变,使选定区域单元无效,杀死单元,并在分析步中向下一阶段传递,实现拆模全过程的模拟.具体按拟定拆模方案,将脚手架和梁底模同时分四次拆模,第四阶段拆模完成,悬挑结构达到工作状态.
3 悬臂梁有限元结果分析
图5为高支模悬挑梁浇筑完成后分析结果,颜色深浅即为应力大小分布情况.悬挑梁钢筋在悬挑端部及梁跨中应力较大,其中最大应力在0.529MPa,钢筋处于弹性变形阶段.混凝土最大应力值位于悬臂梁端,最大应力在0.0284MPa.悬挑梁下三排脚手架立杆底端的应力较大,其中悬挑最大梁截面下立杆底端应力最大,最大应力为22.43MPa(图5).计算结果悬挑梁在浇筑完成阶段钢筋和混凝土均处于弹性阶段,脚手架起主要承重作用,结构稳定.
悬臂梁四阶段拆模阶段计算结果具体如下:
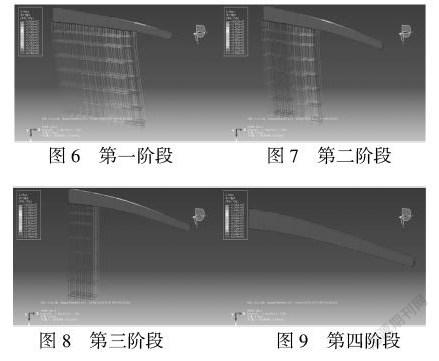
第一阶段:梁自由端竖向挠度3.98mm,脚手架应力最大值:36.6MPa,混凝土应力最大值:0.28MPa,钢筋最大应力:14.9MPa
第二阶段:梁自由端竖向挠度18.47mm,脚手架应力最大值:86.51MPa,混凝土应力最大值:0.57MPa,钢筋最大应力:38.1MPa
第三阶段:梁自由端竖向挠度29.53mm,脚手架应力最大值:20.74MPa,混凝土应力最大值:1.34MPa,钢筋最大应力:86.23MPa
第四阶段:梁自由端竖向挠度58.34mm,混凝土应力最大值:1.37MPa,钢筋最大应力:149MPa.
由模拟结果可得出,第一阶段(图6)和第二阶段(图7)拆模时,脚手架起主要承重作用,混凝土和钢筋应力较小,自由端竖向挠度无明显变化.从第三阶段(图8)开始,钢筋拉应力明显增大,脚手架应力减小.第四阶段(图9),脚手架完全卸除,拆模完成悬挑结构进入工作状态,此时钢筋应力最大值达到149MPa,梁端自由挠度明显增大,达到58mm.
根据规范计算拆模各阶段允许挠度值,悬挑梁挠度限值为2L/400,其计算结果如下:
拆模第一阶段,悬臂梁水平悬挑长度为4m,挠度值模拟值为3.98mm,规范允许挠度值为20mm.
拆模第二阶段,悬臂梁水平悬挑长度7.75m,挠度模拟值为18.47mm,规范允许挠度值为38.75 mm.
拆模第三阶段,悬臂梁水平悬挑长度11.5m,挠度模拟值为29.53mm,规范允许挠度值为57.5 mm.
拆模第四阶段,悬臂梁水平悬挑长度15.25m,挠度模拟值为58.34mm,规范允许挠度值为76.25mm.
拆模过程,混凝土应力较小,梁自由端竖向挠度不断增大,钢筋拉应力增大,但并未超过钢筋抗拉强度设计值,仍处于弹性阶段.
4 结论
利用ABAQUS有限元软件对大跨度悬臂主梁分析计算,按施工及拆模方案,分阶段模拟,模拟混凝土浇筑完成阶段的脚手架体系应力分布情况.利用有限元软件中生死单元,模拟脚手架及混凝土模具拆模过程,从施工阶段过渡至工作阶段,计算脚手架和悬挑结构垂直挠度和应力分布情况,可得出以下结论:
(1)悬臂主梁浇筑完成阶段,主梁截面面积最大处脚手架立杆应力最大,沿悬挑方向,随着梁截面变小,立杆应力逐步减小.
(2)根据ABAQUS应力云图可得出,脚手架每排立杆底部应力最大,立杆顶部和中段应力较大,实际施工中可在悬挑固定端选择立杆上端、中部、底端各布置三个应变计,实时监测应力变化.
(3)悬挑梁脚手架分阶段拆模,每阶段最外侧立杆应力最大,第二阶段应力达到最大值86.51 MPa.随着脚手架的拆除,第二阶段悬臂梁钢筋应力明显增大达到86.51MPa,拆模完成時钢筋应力达到最大值149MPa,未超过钢筋抗拉强度设计值,仍处于弹性阶段.
(4)在拆模各阶段中,ABAQUS模拟悬挑端竖向挠度模拟值均在规范允许值内,大跨度悬挑结构稳定可靠.
(5)此次模拟脚手架采用梁单元,各杆件之间默认刚节点连接,实际盘扣式脚手架杆件连接为铰接,模拟中刚接约束限制转动,脚手架传力和结构形变与实际结构有区别,将来可考虑释放节点自由度,精化计算结果.
参考文献:
〔1〕还文超.大跨度悬挑混凝土桁架结构施工模拟及监测技术[D].苏州科技大学,2016.
〔2〕李伟,张家树,关群.超大跨度悬挑梁设计与施工关键技术研究[J].安徽建筑大学学报,2012(20):29-31.
〔3〕文铁军,曾青,唐竹影.大跨度空间钢结构桁架有限元分析[J].固体力学学报,2008(12):141-145.
〔4〕杨武勇,李卫.大跨度悬挑混凝土桁架结构施工模拟及监测技术[J].施工技术,2018(47):17-20.
〔5〕李清超,徐晓晖,陈刚,邵先.136m高空悬挑钢平台有限元分析及监测技术应用[J].施工技术,2017(46):137-140.
