多种工况下四驱汽车扭矩分配仿真分析
2019-09-10续开轩韩学辉
续开轩 韩学辉


【摘 要】 通过对四驱汽车扭矩分配的特性分析,发现传统的前后轴扭矩的理想分配方式忽略了不同工况下的扭矩分配需求,对于四轮驱动方式,需要考虑汽车加速或坡路行驶时轴荷变化以及再生制动对扭矩分配的要求。本文针对平坦路面匀速行驶工况、坡路匀速行驶工况、平坦路面加速工况三种不同工况展开分析。针对不同工况计算其理想扭矩分配所需获取的信息,并采用车辆动力学仿真软件veDYNA对不同行驶工况进行仿真,得到了车辆纵向车速、轮胎附着率、纵向滑移率和横向滑移率。通过对不同工况下仿真分析,得到前后轴扭矩分配除了受到车辆加速和坡路行驶的影响,还会受到电机外特性的约束,进而得到不同工况下扭矩最优的分配方式。
【關键词】 四驱汽车;扭矩分配;操纵稳定性
【中图分类号】 U461.6 【文献标识码】 A
【文章编号】 2096-4102(2019)06-0093-03
四轮驱动汽车研究重心已经从过去只注重动力,逐步转变成提高整车操纵稳定性、驾驶安全。国内外学者也对此做出了重要贡献。但大多数研究成果都是在一种工况条件下完成的,考虑生活中常见的各种工况的研究并不多见。为此本文针对四种不同工况展开分析,并且采用车辆动力学仿真软件对不同行驶工况进行仿真,从而得到不同工况下扭矩最优的分配方式。
1扭矩分配模型
1.1整车数学模型
车辆行驶过程受力如图1所示,其中符号意义如表1所示。
车辆行驶过程中前后轴车轮纵向力为:
其中,uf为前轴车轮附着率,ur为后轴车轮附着率。驱动以及制动时前后轮与地面接触点的垂直载荷Fzr满足如下关系:
1.2控制策略
坡路行驶时,需考虑车辆坡路行驶时重力加速度对后轴产生的分量。并且对于四驱方式,要考虑车辆加速或坡路行驶时轴荷变化。为了得到不同工况下扭矩分配计算公式重写公式(6)和(7)
车轮动力学满足如下关系式:
车辆在相同附着系数路面行驶时,左右轮的驱动力矩相等。因此仅讨论前后轴力矩分配策略即可。设力矩规划策略规划出总驱动力矩为T*,后轴力矩Tr与前轴力矩Tf分别为:
1.3不同工况扭矩分配需求
1.3.1平坦路面匀速行驶工况
平坦路面行驶时,v=0,vwr=vwf=0,α=0。由公式(12)和(13)可得:
即若已知质心相对前后轴的位置,对于平坦路面匀速行驶或静止工况,可得理想前后轴力矩分配。当质心布置在前后轴中心时,前后轴力矩分配相同。
1.3.2平坦路面加速行驶工况
在平坦路面加速情况下,由公式(12)(13)知前后轴附着率为:
在车速较小情况下加速时,滚动阻力可忽略,此时有
式(21)(22)同时表明,在加速行驶工况下,若想得到理想前后轴力矩分配,需获取车辆纵向加速度,滑移率和车辆静态轴荷分布信息。
1.3.3低速坡路行驶工况
低速通过坡路时,由(12)(13)可知前后轴附着率为:
由前后轴附着率相等条件,可得:
忽略FRf和FRr得:
根据(24)(25)可计算出前后轴分配数i。即在坡路行驶时,要获得理想前后轴力矩分配,需根据传感器信息估计路面的坡度α。
2扭矩分配仿真分析
采用车辆动力学仿真软件veDYNA对直线行驶工况进行了仿真。
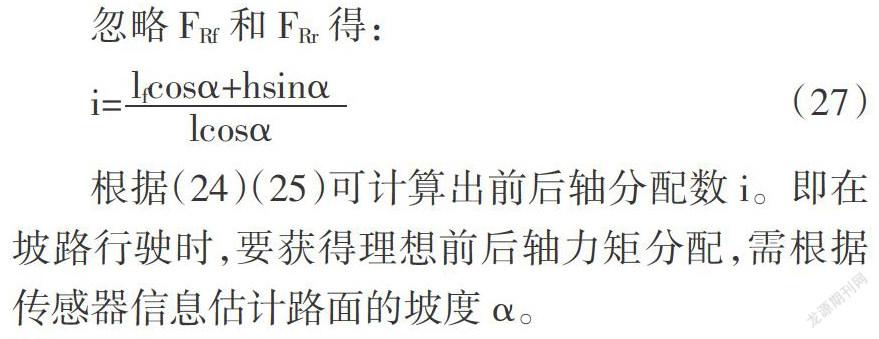
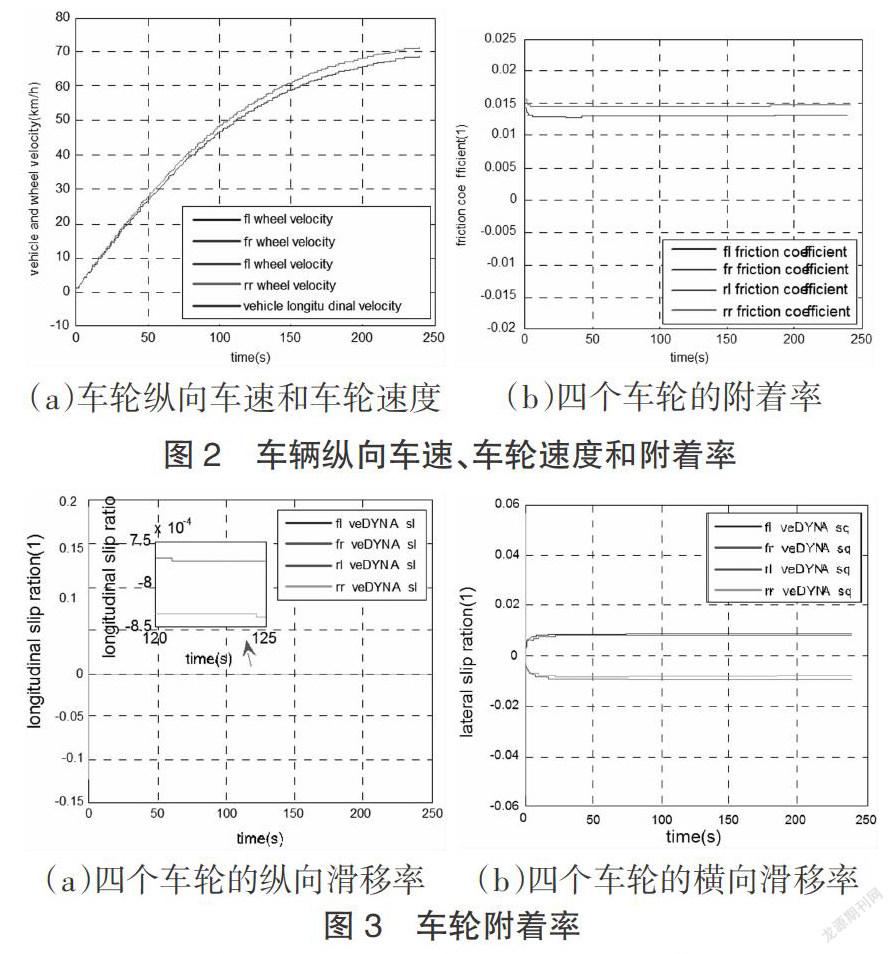
2.1仿真工况1——平坦路面慢加速
车辆在静止情况下,在每个车轮上加60的力矩(采用力矩平均分配策略)时车辆纵向速度、车轮速度和滑移率的仿真结果如图2(a)和图3(a)、3(b)所示,四个车轮附着率如图2(b)所示。结果表明当车轮质心并非处于前后轴中心时,用平均分配策略对车轮驱动影响不大。
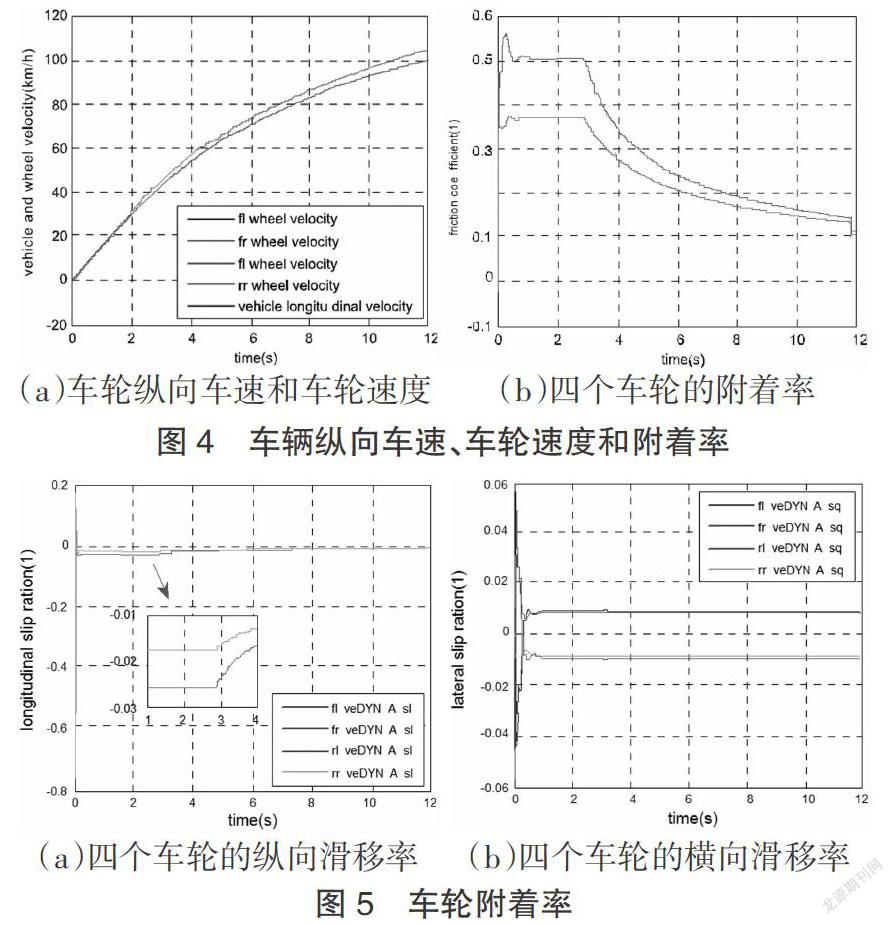
2.2仿真工况2——平坦路面急加速
车辆在静止情况下,在每个车轮上施加400Nm力矩,达到最大功率时,保持最大功率不变,根据车轮转速计算驱动力矩。车辆纵向车速、车轮速度、滑移率如图4(a)和图5(a)、5(b)所示,四个车轮附着率如图4(b)所示。
仿真结果表明,在急加速过程中,平均力矩分配策略,使每个车轮上的纵向摩擦力相同,但轴荷后移使得后轮的压力增大,故而导致后轮的附着率降低。
3结论
基于整车数学模型,研究分析了在不同行驶工况下,轴间扭矩分配对车辆操纵稳定性的影响,根据扭矩分配需求对平坦路面急加速和平坦路面慢加速的车轮速度、车辆纵向速度、滑移率进行仿真。
结果表明轴间扭矩分配既要考虑车辆行驶坡度、车辆加速度,还要考虑到电机外特性曲线的约束。并对汽车扭矩分配设计提供理论指导。
【参考文献】
[1]彭倩.基于模型预测算法的人车闭环系统建模与分析[D].上海:上海交通大学,2015.
[2]张庭芳,张超敏,刘明春,等.基于改进型滑模控制的4WS汽车控制策略研究[J].北京理工大学学报,2017,37(11):1129-1136.
[3]李彬,喻凡.四轮转向和差动制动联合控制的车辆横摆动力学[J].农业机械学报,2008,39(12):1-6.
[4]杨福广,阮久宏,李贻斌,等.4WID-4WIS车辆横摆运动AFS+ARS+DYC模糊控制[J].农业机械学报,2011,42(10):6-12.