自动测量机器人在公路构造物表面变形监测中的应用
2019-09-10闫强田立佳蒋成龙
闫强 田立佳 蒋成龙


摘要:为了实时监测有失稳迹象的公路边坡和桥梁的稳定状态,文章以广西某高速公路边坡及桥梁为依托,采用具有自动测量功能的TCA型高精度测量机器人,结合边坡裂缝发育特征及桥梁变形状态制定了监测方案,对该边坡和桥梁的表面位移进行全天候监测。第一周期监测结果表明:桥梁监测点横向位移及纵向位移累计变化范围在-0.002~0.002m之间;边坡监测点横向位移和纵向位移累计变化范围分别在-0.005~0.005m之间和-0.003~0.003m之间。该技术具有全自动、高精度、智能预警等多项功能,能快速地测设数据,其在工程中的应用为构筑物的稳定状态分析、处治及应急联动提供了数据依据。
关键词:高速公路;测量机器人;滑坡;桥梁变形;预警
中图分类号:U491.116 文献标识码:A DOI:10.13282/j.cnki.wccst.2019.09.047
文章编号:1673-4874(2019)09-0168-05
0引言
高速公路在建设及运营过程中,由于原地貌的人为改变,造成岩土应力的重分布,在自然条件和行车等的影响下,常会出现边坡失稳、滑动、垮塌及桥梁移位等病害,若不及时监测和处置,将可能造成较为严重的后果。因此,采用一定的手段和方式,对边坡及桥梁稳定性状态的监测及预警尤为重要。同时,采用的监测手段要满足精度要求,自动化水平要高,才能有效降低监测成本和提高监测的安全性。而基于自动测量机器人等高精度变形自动监测系统(ADMS,Automatic Deformation Monitorin0Systems)具有全过程自动化控制、实时计算、自动限差检核和报警功能,能够较好地满足高速公路构筑物变形监测情况。为此,本文以广西某高速公路为依托,采用徕卡高精度TS30(测角精度0.5S,120m距离内三维坐标测量可达0.6mm)为代表的TCA型测量机器人为监测基础手段,通过对该高速公路发生滑移的边坡和受此影响而发生形变的中桥进行24h监测,并对数据进行分析和预警,为边坡和桥梁病害的处治方案以及应急联动提供依据。
1高精度自动监测机器人的原理
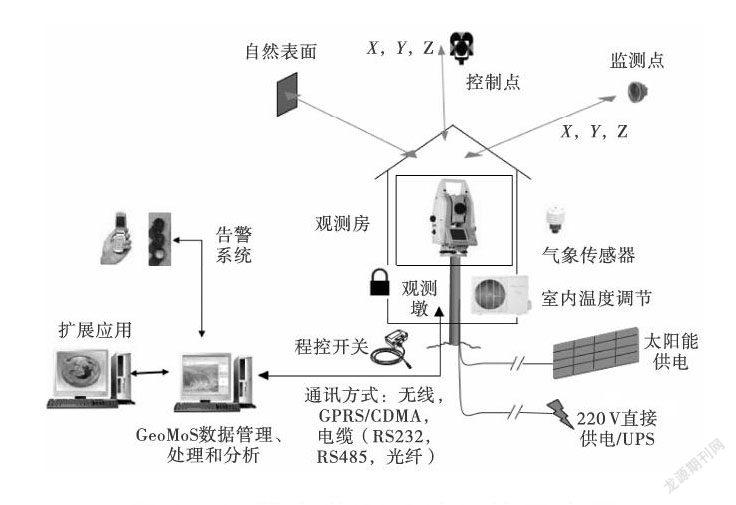
本项目使用徕卡高精度TS30(测角精度0.5S,120m距离内三维坐标测量可达0.6mm)为代表的TCA型测量机器人,该技术目前已经在建构物高精度变形自动监测系统(ADMS,Automatic Deformation Monitoring Systems)中成功使用。系统的特点是全过程自动化控制、实时计算、自动限差检核和报警,精度高(在400m距离内平面坐标精度可达1-2mm,高程精度可达2-3mm),不干扰现场运营,安全高效.系统采用中心控制软件GeoMoS,可以通过各种有线(光纤、485电缆)和无线数据通讯手段(GPRS或者CDMA),远程自动控制可通视位置上设置的TCA测量机器人,定时自动测量布置在桥梁结构关键点上的监测目标,从而完成对桥梁外部变形特征点的实时连续自动化监测。系统结构如图1所示。
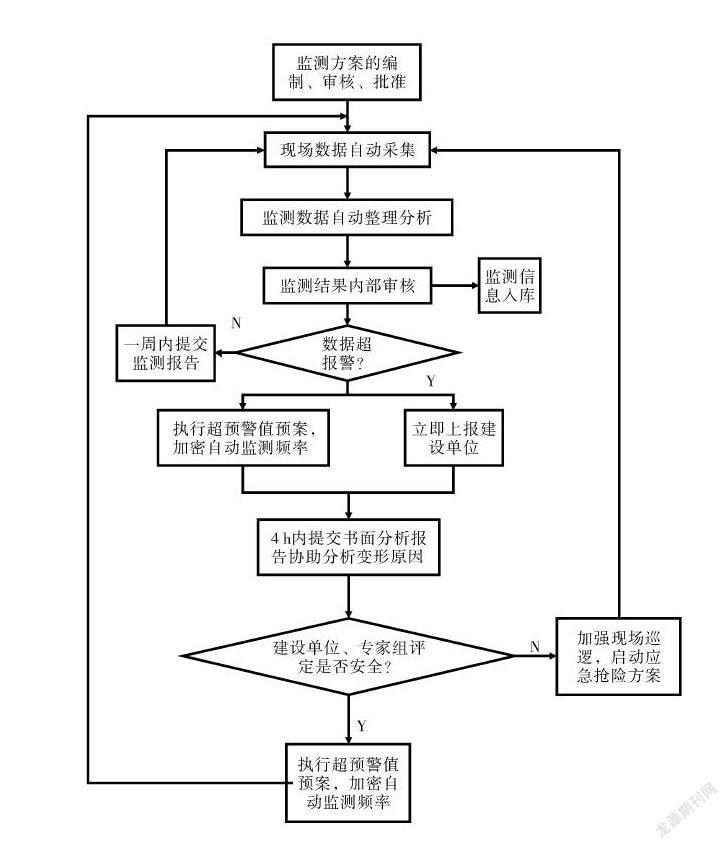
GeoMoS软件系统可实时计算各监测目标的三维变形量,并可设置各变形量的报警限差,一旦系统发现计算结果超过限差,立即通过屏幕显示、电邮发送等方式进行报警。工作流程如图2所示。
2依托工程概况及监测方案
2.1工程概况
广西某高速公路大型路堑边坡滑移,出现了多处裂缝,而边坡下部的某中桥受滑坡体的推挤出现了系列病害。此外滑坡体下方有村庄,存在较大的安全风险。具体病害如下:
(1)上行线2#桥墩右側上边坡有两处滑动面,其中距2#桥墩约210m处有1条斜向裂缝,缝长约82m,最大错台量约0.30m;距2#桥墩约160m处有1条倒“V”型裂缝,缝长约35m,最大错台量约0.65m。
(2)上行线隆林端桥台伸缩缝装置卡死,下行线百色端桥台伸縮缝混凝土锚固区开裂。
(3)上行线百色端桥台右侧背墙有1条宽约3mm的横向裂缝,下行线百色端桥台左侧背墙有1条不规则斜向裂缝,宽约3mm。上下行百色端桥台间有错台,最大错台量约2.3cm。下行线百色端桥台浆砌片石排水沟与桥台前墙形成1条由小到大的间隙,最宽处约3cm,且排水沟有3条疑似下沉引起的裂缝。
(4)上行线1#、2#桥墩,下行线1#桥墩盖梁防撞挡块均受到不同程度挤压破损,其中上行线2#桥墩盖梁右防撞挡块受挤压破损开裂最严重,竖向裂缝宽约15mm。
(5)上行线2#桥墩距地面约2m置发现3条水平裂缝,裂缝间间距约0.15m,最大缝长约2.395m,最大缝宽约0.17m。经现场踏勘,诱发桥梁病害可能的主要原因是上行线2#桥墩右侧上边坡滑塌所致。
2.2 监测方案
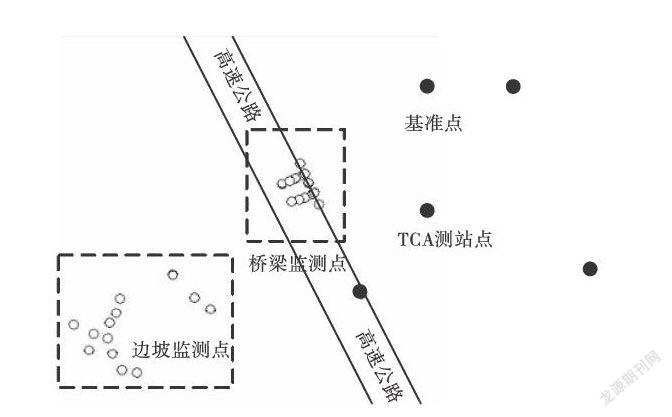
根据现场踏勘,选在平中屯一村民房屋楼顶制高点设置TCA测量机器人监测站.在该中桥桥梁、各个桥墩分别布置监测点,其中每个桥墩布置2个监测点,桥梁布置5个监测点,在边坡表面上布置13个监测点。同时在周围稳定建筑物上设置了4个基准点作为整个系统的定向、自动检核和调整的基准点,确保系统的高精度和可靠性。测站点及基准点具体布置的位置如图3所示。
2.3监测频率及预警设置
(1)监测期:滑坡处治前应急监测,主要对桥体结构位移和滑坡体进行24h实时监测,根据力学及经验分析,监测周期时间暂定5个月。
(2)监测频率:自动化监测频率可以做到24h实时监测,可根据实际状态进行调整,暂时拟定为1h进行一次数据采集。桥梁结构位移监测和边坡表面位移可实时采集数据。
(3)预警设置:由于桥梁已经发生变形,桥梁原始状态已无法获取,因此,监测系统的预警值设置是根据桥梁现有的状态及经验,预警设置三个级别。即桥梁主体结构位移值达到5mm或沉降值达到10mm时进行黃色报警;位移值达到10mm或沉降值达到15mm时进行橙色报警;位移值达到15mm或沉降值达到20mm时进行红色报警。边坡表面高程位移或沉降达到20mm时进行黄色报警;高程位移或沉降达到40mm时进行橙色报警;高程位移或沉降达到60mm时进行红色报警。见表1和表2。
3监测数据分析
分析的监测数据起止时间为2019-06-01到2019-06-14,共14d时间,桥梁监测选取11个监测点,边坡表层选取13个监测点,绘制其变化曲线图并进行分析。
3.1桥梁监测数据分析
桥梁监测点的横向位移、纵向位移、高程位移变化趋势如图4-6所示。
在桥梁监测过程中,根据桥梁监测数据结果表明:(1)监测点横向位移累计变化范围在-0.002-0.002m之间;(2)监测点纵向位移累计变化范围在-0.002~0.002m之间;(3)监测点高程位移累计变化范围在-0.003~0.003m之间;(4)桥梁监测点高程位移监测数据显示,部分数据偏移较大,经分析可知,该数据为误差数据,可以忽略。
为了进一步分析桥梁整体位移的变化情况,取gxjt-101、gxjt-102监测点一周内的数据进行分析(图4-6中绘制区域),其两个监测点的横向、纵向、高程坐标变化趋势图,如图7所示。
从图7中可以看出,尽管桥梁处于有规律性的弹性变化,但分析其线性趋势线时,可以明显看出,桥梁监测点gxjt-101、gxjt102横向位移、纵向位移均仍处于缓慢变化中,需要加强观测频率。
3.2边坡表层监测数据
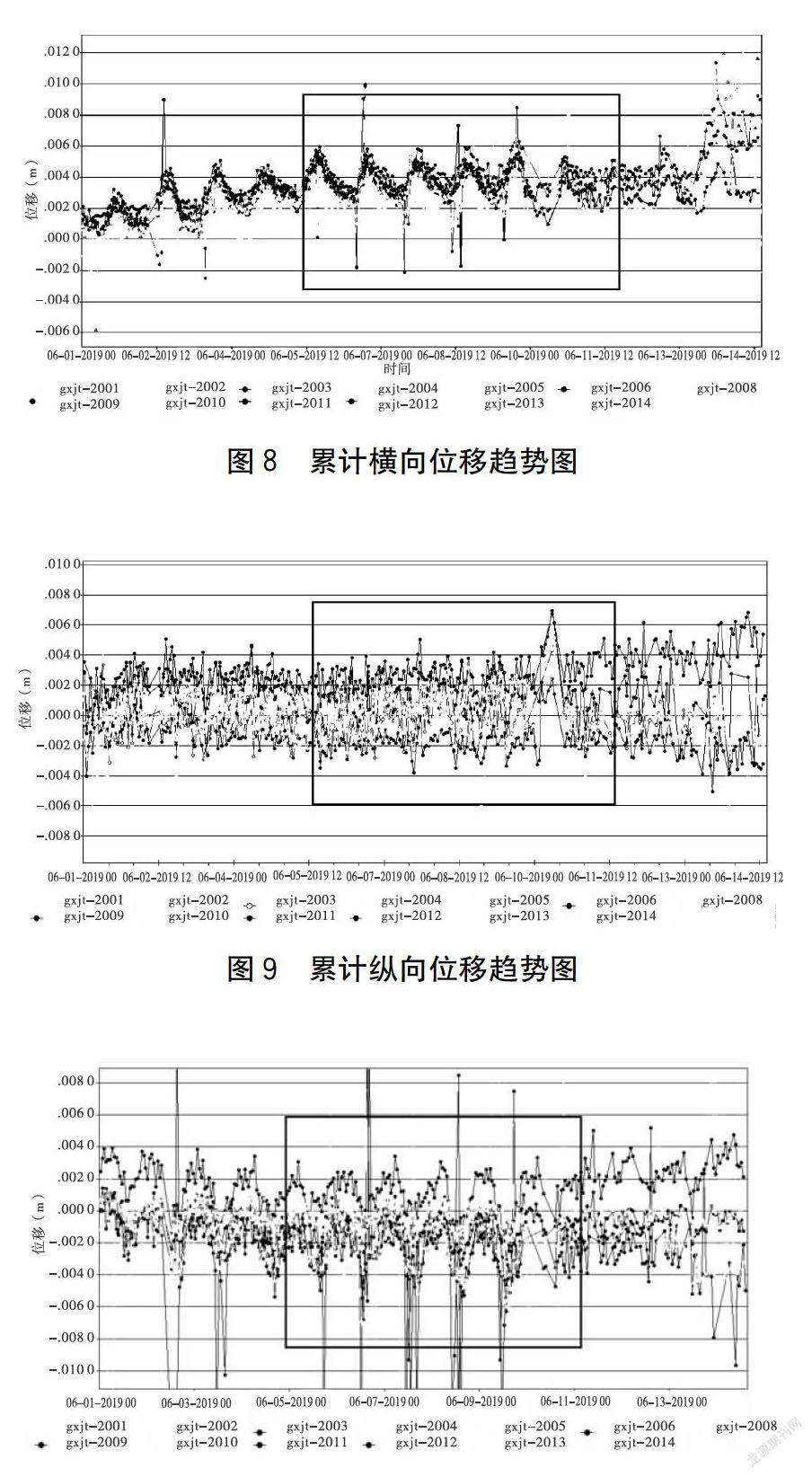
边坡表层的横向位移、纵向位移、高程位移变化趋势图如图8-10所示。
在边坡表层位移监测过程中,根据边坡监测数据结果表明:(1)监测点横向位移累计变化范围在-0.005~0.005m之间;(2)监测点纵向位移累计变化范围在-0.003~0.003m之间;(3)监测点高程位移累计变化范围在-0.005~0.005m之间。
为了进一步分析边坡表层位移的变化情况,取gxjt-2001,gxjt-2002监测点一周内的数据进行分析(图8-10中绘制区域),其两个监测点的三维坐标变化趋势如下页图11所示。
从图11中可以看出,边坡表层位移同样处于有规律性的变化,分析其线性趋势线时可以看出,边坡监测点gxjt-2001、gxjt2002纵向位移、高程位移均仍处于变化中,其中纵向位移变化率较大,需要加强巡查工作。
4 结语
本文以广西某高速公路边坡及桥梁为依托,采用具有自動测量功能的TCA型高精度测量机器人对该项目的表面变形进行了实时监测:
(1)测量机器人在保证高精度的前提下,具有全过程自动化控制、实时计算、自动限差检核和预警功能,且成本低,不干扰现场运营,安全高效。
(2)要在充分分析边坡滑动面及桥梁受力状态的前提下布设监测边坡和桥梁表面变形的棱镜点位,棱镜成本较低,点位布置范围尽可能大一些。
(3)建议利用物联网、云计算等技术将自动化的测量设备与全寿命周期内基础设施的稳定状态分析平台建立关联。