基于多传感器和SVR算法的油田多相流实时计量技术研究
2019-09-10申洪源张雅楠赵世睿张海峰
申洪源,马 亮,张雅楠,陈 冰,赵世睿,张海峰
(1.南方石油勘探开发有限责任公司,海口 570216;2.北京中油瑞飞信息技术有限责任公司,北京 102206;
3.清华大学 深圳研究生院 海洋科学与技术学部,广东 深圳 518055)

图1 双差压文丘里测量装置Fig.1 Double differential pressure venturimeasuring device
0 引言
目前伴随人工智能和物联网技术的快速发展,在油气生产行业,新兴的在线多相流计量技术已被英国石油(BP)等国际能源巨头列举为“决定未来油气工业成功的五大关键技术”之一,是能源物联网行业中关键的一环。
在线油气水多相流流量测量是油气行业流量交接、油藏分析、优化作业等工作中亟需的技术[1]。然而由于油气水物性参数多样,流动过程复杂,测量手段各异,目前难以用单一测量装置和数学模型进行各相流量的准确描述,这也是严重制约油气生产流量实时测量技术发展的瓶颈问题。因此,采用多传感器协同和多测量模型融合的方式进行测量,已成为目前国内外多家公司和学者研究的热点。如美国AGAR 公司、挪威FRAMO 公司和ROXAR 公司以及中国海默公司多采用文丘里和射线的方式进行多相流流量的测量[2]。但是,由于射线方式成本较高、有辐射,且受到相关法规限定,适用范围有限,在实际应用过程中受到一定的限制。新一代的多相流检测方法则多采用如电容(ECT)、电阻(ERT)、微波等非放射方式来代替传统放射性测量方式,从而降低设备生产成本和提高设备安全性能[3]。如文献[4]采用了电导环阵列和内锥式差压传感器相结合,并结合了卡尔曼集中式融合估计方法进行总流量的测量。文献[5]采用文丘里和电容成像系统进行油水两相流量识别。对于油田多相流模型构建,众多有关文献报道中展示:早期文丘里差压测量的基础模型是均相流模型和分相流模型等传统模型,这些传统测量模型受测量条件影响较大,大部分是通过实验获得修正系数,对于复杂的流场环境缺乏普适性。近年来随着机器学习等人工智能技术的快速发展,采用机器学习算法代替传统的数学统计方法来进行模型构建的方式在多相流领域也在慢慢兴起,2010 年Meribout 等人采用文丘里、电容-电导、超声流量计进行油气水三相的测量,并采用BP 神经网络进行多相流量的识别[6]。2011 年Xu 采用了基于SVM(支持向量机)的机器学习方法对长喉文丘里压降信号进行学习来构建湿气流量测量模型[7]。目前采用机器学习的算法在多相流领域已经取得了一定的效果。
鉴于上述情况,本文创新性的开展基于文丘里和微波等多传感器协同测量方式,通过开展油气水不同分相含率范围内的多相流动过程测量实验研究,在充分的实验数据基础上,研究采用基于支持向量回归(SVR)的机器学习算法,自主学习文丘里和微波测量信号特征与多相流量间的关联规则,建立油气水多相流气相、液相流量和含水率的机器学习模型,为进一步满足石油工业对油气水多相流计量精度和适应性日益增长的要求,提供一种新的技术支持。
1 多传感器融合的流测量方法
1.1 基于文丘里和微波多相流测量原理
1.1.1 双差压文丘里流量测量
文丘里差压式流量计包括“收缩段”“喉道”和“扩散段”三部分。其技术原理为:基于连续性方程和伯努利方程,流体在经过文丘里“收缩段”时流体会产生局部压缩,流速增加,静压力降低,从而在收缩段前后形成一定的压力差。经过“喉道”时流体则会与管壁产生摩擦作用后会形成压力损失。流量越大,经过文丘里“收缩段”“喉道”所产生的差压就越大。因此,可以根据差压信号的变化来获得流体流量变化。通过实验近一步发现,文丘里传感器在“收缩段”和“喉道”差压信号对流体中含有的气体和液体比例不同,所变现出来的信号也不尽相同。因此,可以通过分别安装在“收缩段”和“喉道”的差压传感器获得两组差压信号来求得气相流量和液相流量[7]。
1.1.2 基于微波的含水率测量
原油含水率同样是石油工业中的一个重要测量参数,微波的波长被规定在1mm ~1m 之间,其频率范围相当于300GHz ~300MHz。不同波长的电磁波具有不同的能量,电磁辐射的能量与波长成反比。而微波测量技术则可以在一定微波频率下,通过测量微波信号通过油水混合物中油相和水相时,微波信号幅值和相位发生的变化来测量混合物中含水率(wlr)[8,9]。根据油(介电常数:2-4)水(介电常数:80)介电常数差别,对微波信号的吸收不同等特点,通过测得透过油水混合物后的微波信号幅值和相位变化来获得油水混合物的含水率。
1.2 基于SVR的人工智能识别原理
支持向量机(Support Vector Machine,SVM)于1995年由Vapnik 提出,它是在统计学理论的基础之上发展起来的一种新的学习方法。SVM 主要应用到两类问题的研究,一是分类问题,即:支持向量分类(Support Vector Classification,SVC);另一类是回归(Regression)问题,即:支持向量回归(Support Vector Regression,SVR)。
SVR 的回归分析的基本思想可表示为设原有空间训练样本:

利用函数Φ(·) 变换将l 个训练样本映射到高维特征空间,并在此空间中应用回归函数:

拟合原有空间中的数据样本(xi, yi),其中,w 是高维空间中的向量,Φ(·)是该高维空间中的函数向量,b 为该高维空间中的标量。支持向量机的基本理论及其求解过程可以描述为,根据结构风险最小化准则定义目标函数:
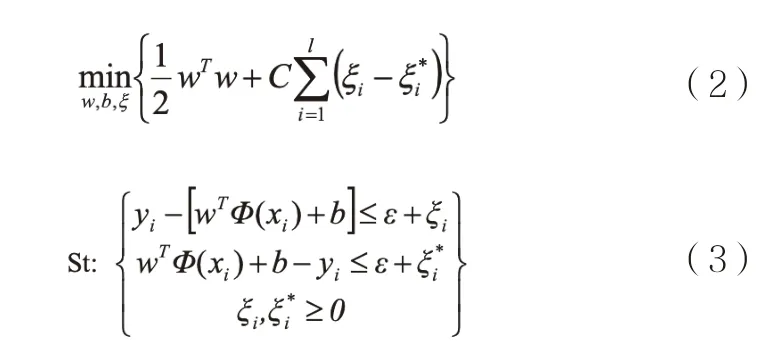
等式(3)中的ξi,ξi*为间隔松弛因子,其可保证目标函数在约束条件下一定会有解。ε 为不敏感损失因子,表示可允许范围的训练损失,对给定的ε,目标损失函数可以定义为:

目标函数(2)中,C>0,称之为惩罚因子,其作用是控制超出误差范围ε 的样本数据的惩罚程度,同时目标函数的Hessian 矩阵正定,是一个凸函数。因此,可以通过采用对偶理论求解凸二次规划问题进而获得目标函数的最优解。
建立Lagrange 函数:
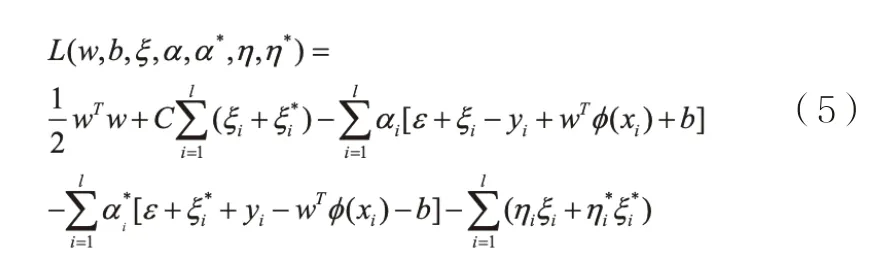
其中,α,α*,η,η*≥0 为Lagrange 乘子,在核函数满足Mercer 条件下,其Lagrange 函数也为凸函数,其求取的局部最优解则为全局最优解。并根据Kuhn-Tucker 定理可将原空间内的输入样本和输出样本回归形式在高维空间内表示:

其中:

等式(6)中,非线性函数Φ(·)的引入可以将低维空间中的样本数据映射到高维空间,通过在高维空间进行数据样本的线性回归,从而实现样本数据在原始空间中的非线性回归效果。同时,也可以通过定义核函数(Kernel Function)K(xi, xj)=(φ(xi)·φ(xj))来简化非线性逼近,此方法主要原理为通过核函数将函数的求解过程直接在输入空间中计算,从而绕过特征空间,避免计算非线性映射Φ(·)。核函数的引入可以将等式(6)转化为:

其中,m 为支持向量的个数,支持向量的个数由(αiαi*)决定,只有非零的(αi-αi*)对计算权值w 才有贡献,支持向量的定义也是由此而得来的。
常见的核函数如下所示[10]:
1)线性核函数。
2)多项式核函数。
3)高斯基径向基(RBF)核函数。
2 气液两相流测量实验
2.1 多传感器测量信号获取
本文模型构多相流量计测量样本信息为:采用文丘里和微波组合方式进行试验数据测量,测量信号包括管道运行压力、流体温度、文丘里前压差(收缩段)、文丘里后差压(喉道)、微波幅值、微波相位共计6 种观测信号,样本标签为气相流量、液相流量和含水率3 种流量参数。测量过程中,由于数据获取过程为连续动态计量,分离罐标定装置和三相流量计间管道内存流体和分离罐分离速度等原因,会导致标定结果存在系统误差。为了消除系统误差,设定每组样本数据采集时长为5mins,传感器采集频率为10Hz。油气水三相(油:0m3/h ~5m3/h,气:0m3/h ~100m3/h(标况),水:0m3/h ~5m3/h)流动过程测量实验,累计获得500 组实验数据。
2.2 样本预处理和特征提取
文丘里和微波测量样本自身存在干扰和缺失信息,需要进行样本预处理和特征提取。首先,对采集信号进行均值滤波处理、异常数据剔除和缺失数据补齐等数据预处理工作,获取预处理后每个数据样本结构为300×6 的数据矩阵。之后,对预处理后的样本数据分别在时域和频域范围内进行特征参数提取,包括前差压时域均值、方差、频域峰值、峰值频率,以及管道压力、后差压、温度、微波幅值、微波相位等均值,总计9 组特征参数。
2.3 流量识别模型构建
对上述特征数据进行归一化处理,并将采集样本顺序随机打乱后构建模型的训练和测试样本。其中,设定90%数据用于模型的训练,剩余10%用于对训练模型性能进行测试评价。模型训练过程中,对影响模型性能的3 种核函数采用穷举法分别进行测试,同时对于每种核函数,采用交叉验证和网络搜索法寻找最优SVR 模型参数。
本文采用总流量误差(SPE)、平均绝对比例误差(MAPE)、平均绝对误差(MAE)和支持向量数量(N)4个评价指标,对不同核函数下SVR 模型建立的性能进行分析评价。

图2 气相流量测试结果Fig.2 Gas flow test results
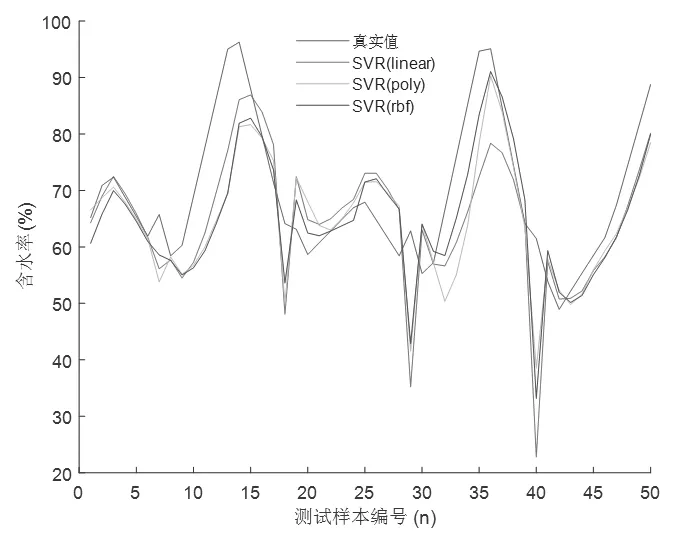
图4 含水率测试结果Fig.4 Water content test results
3 实验结果分析
本文采用SVR 算法和网格搜索法分别对气相流量(Qg)、液相流量(Ql)和液相含水率(wlr)3 个关键参数测量模型进行训练和测试,对于不同核函数下的SVR 模型测试结果和相对误差分别在图2 ~图4 中给出。其中,图2、图3 给出气相和液相流量测试结果的相对误差。鉴于含水率为计算油相流量和水相流量过程中的过程量(单位为百分比)。因此,图4 给出含水率测量结果的绝对误差。
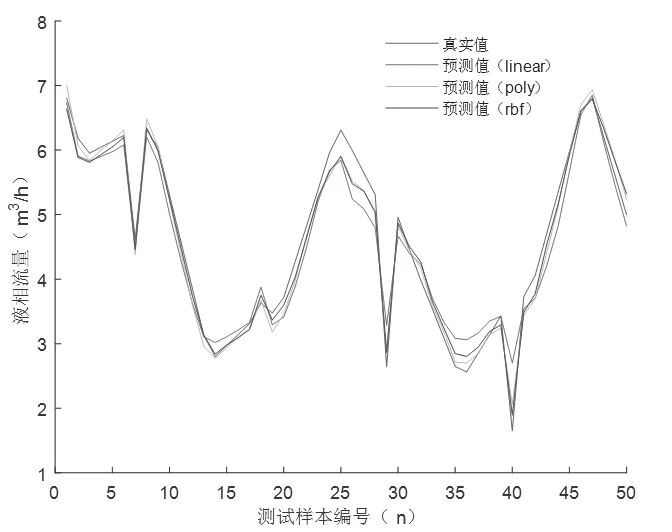
图3 液相流量测试结果Fig.3 Liquid flow test results
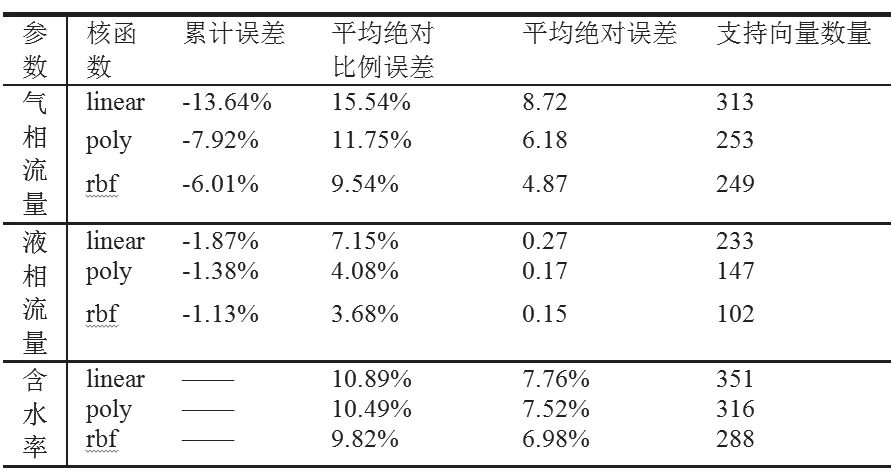
表1 测量评价结果Table 1 Measurement evaluation results
对采用linear、poly、rbf 三种核函数构建的多相流气相、液相流量和含水率的SVR 回归模型的性能进行评价,评价结果如表1 所示。
累计误差(SPE)、平均绝对比例误差(MAPE)和平均绝对误差(MAE)等参数,均可以从多个方面反映测量值与真实值之间差异程度,对于上述三种评价指标,其值越小说明预测模型描述实验数据越具有更好的精确度。对表3 的4 种评价指标可以确定:
1)对于气相流量,本文通过采用rbf 核函数构建的回归模型可以实现气相流量长时间50 个样本共计250mins 的累计测量,流量的相对误差为-6.01%。5mins 的瞬时流量平均相对误差为9.54%,绝对误差为4.87Nm3/h(标况流量);2)对于液相流量的测量测试结果,基于rbf 核函数的SVR 模型累计液相流量相对误差为-1.13%,5mins 的瞬时测量平均误差为3.68%,绝对误差为0.15m3/h;3)含水率测试的5mins 的瞬时测量平均误差为9.82%,绝对误差为6.98%;4)对比气相和液相的测试结果,可以看出基于文丘里的压差测量方式的流量计,对流体质量特征测量更为准确。因此,液相流量测量效果更好;5)气相、液相流量和含水率的测试结果表明,本文构建的基于多传感器和SVR 算法的多相流测量模型满足油田对气相、液相流量和含水率测量误差<10%的油气生产计量要求;6)从表中可以看出用rbf 核函数构建的svr 模型在支持向量数量上同样小于linear 和poly 两种核函数。因此,也证明了rbf 核函数构建的模型测试泛化效果更优。
4 结论
针对油气生产过程中油气水在线实时测量技术的实际需求,本文提出了一种基于多传感器和SVR 算法的油田油气水多相流量量化检测方法。通过采用双差压文丘里和微波协同测量的方式进行在线实时流动参数测量,并提出了一种基于SVR 的机器学习的人工智能算法,利用多传感器间互补信息进行气相、液相流量和含水率量化检测模型的构建和测试,对影响SVR 模型性能的核函数等关键参数进行分析,分析结果表明,采用rbf 核函数的SVR 构建的多相流测量模型可实现5mins 瞬时气相流量相对误差为9.54%,液相流量相对误差为3.68%,含水率绝对误差为6.98%的测量精度,达到了工业油气生产过程中多相流产量的计量要求,为油气生产过程中油气水在线实时测量提供了一项新的技术方法。
