全自动无人驾驶综合自动化系统分析与设计
2019-09-10熊天圣王克斌
熊天圣 王克斌
摘 要:轨道交通全自动无人驾驶系统具备安全运营、组织灵活、优化乘客服务、减少人员配置的优势,成为轨道交通发展的主要方向。综合自动化系统作为轨道交通综合运营调度管理系统,能够很好地满足无人驾驶高度自动化、集中化、安全化的需求。本文通过分析城市轨道交通全自动无人驾驶系统的运营调度管理需求,梳理全自动无人驾驶的关键因素,从智能集成、运营场景、信息一体化融合展示、智能运维等方面对全自动无人驾驶综合自动化系统进行设计研究。
关键词:全自动无人驾驶系统;轨道交通综合自动化系统;智能集成;信息融合展示;智能运维
中图分类号:U172.7 文献标识码:A 文章编号:2096-4706(2019)14-0093-03
Analysis and Design of Automatic Unmanned Integrated Automation System
XIONG Tiansheng,WANG Kebin
(Shanghai Seisys Intellingent System Co.,Ltd.,Shanghai 200063,China)
Abstract:With the advantages of safe operation,flexible organization,optimizing passenger service and reducing staffing,the automatic driverless system of rail transit has become the main direction of rail transit development. As an integrated operation and dispatching management system of rail transit,the integrated automation system can well meet the needs of highly automated,centralized and safe driverless operation. In this paper,the operation dispatching management requirements of the automatic unmanned driving system for urban rail transit are analyzed,and the key factors of the automatic unmanned driving system are sorted out. The design and research of the automatic unmanned driving integrated automation system are carried out from the aspects of intelligent integration,operation scene,information integration display,intelligent operation and maintenance.
Keywords:automatic unmanned driver system;rail transit integrated automation system;intelligent integration;information fusion display;intelligent operation and maintenance
0 引 言
城市軌道交通具有多复杂专业共同运营、空间密闭性强、列车运行密度高、客流量巨大、社会高度关注、应急指挥协调难度大等特点。在运营中如果出现行车延误、设备故障、大型社会活动客流冲击、自然灾害、人为破坏等突发事件,往往会导致轨道交通网络局部拥堵,有的甚至会影响整个轨道交通线网的运营,造成恶劣的社会影响。轨道交通全自动无人驾驶系统具备安全运营、组织灵活、优化乘客服务、减少人员配置的优势,已经成为轨道交通行业的发展趋势,运营指挥调度系统如何更好地满足无人驾驶高度自动化、集中化、安全化的需求成为亟待研究的课题。
城市轨道交通在通车运营时,一般会同步建设完成以设备管理为核心的综合监控系统,集成电力、环控、门禁、消防系统,互联通信系统,实现信息共享和系统间的联动,但是受限于集成范围和深度,主要集中于消防联动,不能完全发挥多系统数据资源和综合联动的优势。城市轨道交通综合自动化系统,是指在统一的硬件、网络资源和智能化监控平台上,对行车监控、车辆信息、机电设备、通信系统的全面、深度集成,以行车指挥为核心,实现轨道交通的综合运营管理和调度,对全自动无人驾驶的智能运行来说具有重要意义。
1 全自动无人驾驶运营调度管理分析
1.1 全自动无人驾驶关键因素分析
轨道交通全自动无人驾驶线路与常规线路在运营管理上有明显不同,最基本的区别是,在管理上,因为列车司机配置的取消,全自动无人驾驶系统需要在控制中心新增代替司机,对车载乘客进行服务和管理的岗位,以及对车辆运行进行监视和管理的岗位,一般称为乘客调度和车辆调度;在技术上,全自动无人驾驶系统集成车辆信息监控,并且在广度和深度上也有延伸,需要实现场段内监控。
全自动无人驾驶模式下,除了需要对信号/车辆/综合监控ISCS三大系统进行技术上的改造外,还需要从运营筹划方面满足无人驾驶系统的需求。需要组建具备多专业知识结构的综合调度团队和运维团队,加强轨道交通运行的综合调度指挥能力和安全运维能力,提升控制中心集中实时控制管理水平,为无人驾驶系统正常运营提供管理上的支撑和保障。同时,根据无人驾驶的需求以及国内轨道交通当前的运营组织现状,制定适用于国内轨道交通运营条件的管理目标、运营策划、应急调度、维护管理等制度值得重点研究。
1.2 全自动无人驾驶运营调度管理需求分析
在全自动无人驾驶模式下,车辆、信号、综合监控三大关键专业系统需要高效协同,共同完成各类场景的作业任务,实现以行车调度指挥为核心的运营管理。全自动无人驾驶调度指挥和运营管理的主要需求分析如下。
1.2.1 实现以行车指挥为核心的智能集成
轨道交通全自动无人驾驶系统,需要在常规以设备管理为核心的综合监控系统基础之上对集成范围进行扩展,增加对各个系统的集成深度,即建设综合自动化系统,实现对轨道交通中机电系统设备、行车、车辆、乘客、环境的全面监控,实现信息共享、协调调度,最终达到行车调度指挥和车站智能化运行管理,满足全自动无人驾驶在控制中心、车站、区间、厂段的各类场景联动。
1.2.2 一体化的运营信息融合展示,实现高效率运营场景联动指挥
通过将车辆信息、行车调度信息和机电设施设备的状态信息进行深度集成和高度融合,为调度指挥人员提供多专业融合信息全景展示,通过综合自动化系统能减少多专业信息接口联通处理环节,实现各个系统的扁平化和模块化管理,避免通过系统外部接口带来的接口信息固化、场景固定、通信延时等问题,提升运营管理的效率和应急指挥的速度。
1.2.3 实现多专业设施设备的智能运维
常规系统的机电、车辆、信号系统各业务设备的实时和历史数据是分别进行采集和管理分析的,各个专业之间信息互通性较差,难以综合运用。在全自动无人驾驶的情况下,综合自动化系统对机电、车辆、行车进行统一集成,实时采集信号、车辆、供电、机电、通信等各专业设备的状态数据并统一汇聚到线路综合数据平台中,利用多源异构数据融合、人工智能、大数据分析决策、智能学习、设备健康诊断模型等技术,构建综合性的运维平台,实现轨道交通智能运维管理,对隐患提前预警,推动设备维修模式从“故障修”到“状态修”,从而降低轨道交通设施设备的故障率,保证运营的可靠性和安全性。
2 全自动无人驾驶综合自动化系统设计
全自动无人驾驶综合自动化系统以行车指挥为核心,将车辆、行车、电力、机电、通信等专业深度集成,全面提升运营管理和乘客服务;按照无人驾驶系统顶层设计进行场景定义和功能分配,在统一平台上实现多专业信息融合展示,实现基于运营场景的所有功能,满足全自动无人驾驶的场景联动;全方位采集各专业设备设施的运行、故障数据,进行设备状态预警与健康度分析,实现设备维护智能化。
2.1 全自动无人综合自动化系统集成架构
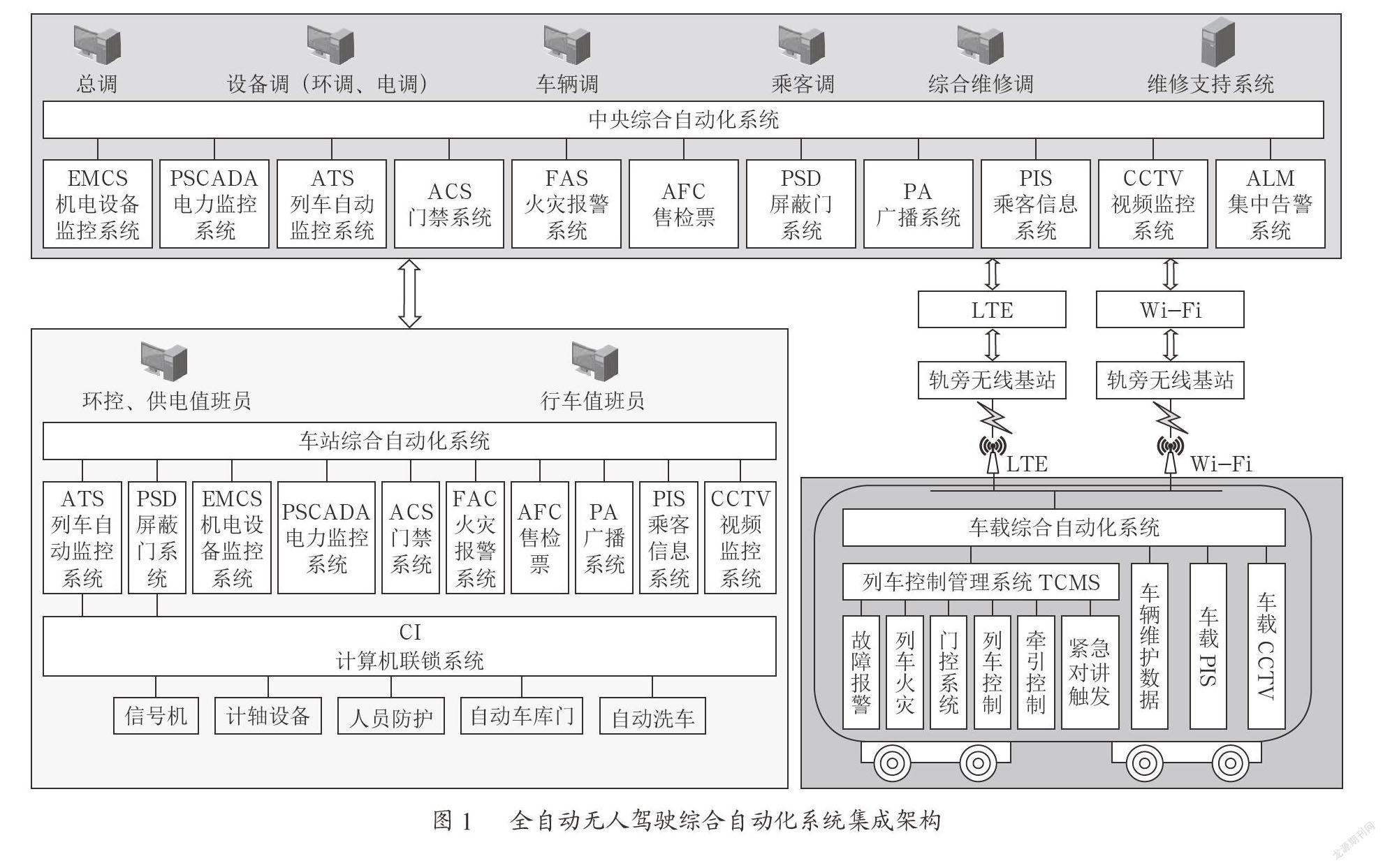
全自动无人驾驶综合自动化系统由中央综合自动化系统、车站综合自动化系统(包含场段)以及车载综合自动化系统组成。与常规线路以设备调度为核心的综合监控系统相比较,新增与信号系统ATS的深入融合以及车载综合自动化系统。在系统设计时需要优化与信号专业ATS的集成设计,选择合适的集成方式,加强对列车运行、行车故障、乘客报警、车辆故障、车站机电设备的联动和信息整合。车载综合自动化系统,通过MVB总线实现对车辆TCMS的信息接入和数据整合,通过接入车载PIS環网实现对车辆PIS的信息接入和数据整合,通过维护以太网全面采集车辆维护数据,从而实现控制中心调度对车辆乘客的监视和互动,包括广播、视频监视以及对讲等功能,实现车辆设备的工况管理、状态监控、联动等功能。系统整体架构如图1所示。
2.2 全自动无人驾驶场景联动和一体化信息融合展示
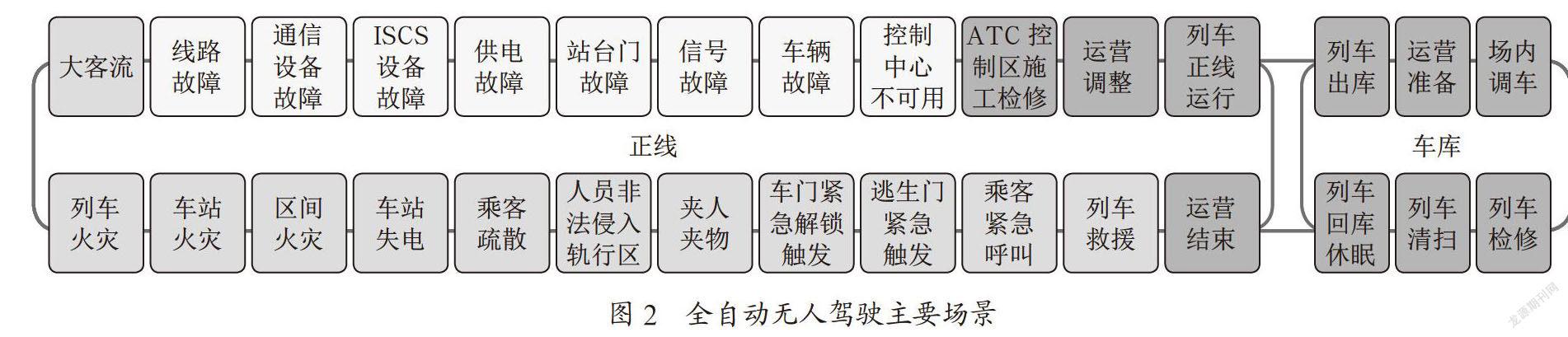
全自动运行运营场景作为全自动运行运营策划的主要内容和运营需求,对系统功能分配、系统设计、作业流程及运营规则都有重要的指导作用。运营场景的设计需要统一轨道交通全自动运行线路正常、故障和应急的主要场景,空间范围涵盖正线和车库,明确各类场景的处置流程和功能需求分配。全自动无人驾驶的基本场景分析如图2所示。
全自动无人驾驶系统将轨道交通行车调度指挥和运营管理进一步集中于控制中心,控制中心的调度需要实现对车辆、车站、场段大范围的集中监控,需要对全局范围内的监控内容进行综合性的组织和融合。综合自动化系统在扩大集成范围和增加集成深度的情况下,大大提高了控制中心的监控能力,融合一体的机电设备监控、电力监控、行车调度、车辆监控、乘客监控、环境监控,在综合自动化系统上采用多专业信息融合可视化技术进行组合,提供综合全景监视视图和控制功能。例如在控制中心的行车监视人机界面上,融合展示行车、机电、车辆的综合信息,在传统的ATS站场图的基础上,融合触网供电信息、车站工况信息、隧道风机信息,结合站场图的列车位置信息、信号信息、设备信息、车辆的状态信息,通过这张行车全景图,可以总体掌握线路行车调度所需的所有相关信息。在车站的综合运营信息人机界面,融合展示整个车站的多专业整体健康情况、重要设备运行情况、客流状态、车站环境状态、车站网络状态信息,通过车站全景图,车站运营人员可以总体掌握车站运营所需的所有相关信息。
2.3 轨道交通全自动无人驾驶一体化智能运维
轨道交通现有的综合监控、车辆、信号、通信系统等各个专业的维护支持系统分离设置,各系统的实时状态数据、维护管理数据独立采集和存储,难以互通使用,难以进行跨专业联合分析和诊断。面向全自动无人驾驶的综合自动化系统,将机电、车辆、信号、通信等轨道交通各个专业的实时数据和维护数据做统一的采集并汇聚到综合数据平台,有利于进行运行和维护全过程多专业的信息的融合。在无人驾驶的情况下,各专业需要紧密协作,一旦出现故障和突发事件,其造成的影响会牵涉更多的系统,这就需要对多专业的数据进行综合分析,提前对系统和设备的健康度进行诊断,对隐患提前预警,并对发生的故障进行快速的智能定位,对于保证地铁运营安全具有十分重要的意义。
智能运维通过数据采集、数据共享、服务共享、运维管理实现对无人驾驶各个专业系统自动化故障智能检测,自动判断设备在运营过程中存在的隐患,对即将发生的故障及时发出预警,辅助运维管理者进行消患、故障根因判断和运维处理。智能运维实现在轨道交通全自动无人驾驶的复杂系统和大规模运营设备情况下,采集、存储多专业海量设备实时运行数据,经过智能分析,以可视化的形式展现出来,从而为管理者提供运维管理的智能决策。
智能运维连接轨道交通的工业自动化监控系统和信息化运维系统数据,使轨道交通自动化和信息化应用深度融合;将轨道交通的自动化工业设备运行特有格式的状态数据、原始日志、图片、多媒体文件等非结构化数据转化成可识别的结构化数据或时间序列数据;通过建立采集数据与设备模型的映射关系,实现数据与设备联动,设备与运维管理联动,做到自动化处理设备数据采集、健康智能诊断、运维管理自动化触发,智能化的推动维保管理的完整闭环。利用人工智能、大数据分析技术解决人工的阈值设定、提高故障预判预警能力。通过对多种专业运维数据的聚合和跨专业分析,及时有效地为管理者提供运维决策支持。
3 结 论
轨道交通全自动无人驾驶综合自动化系统实现多专业的信息融合,是轨道交通大数据的综合管理平台;为跨专业联动、应急调度指挥、设备安全监测、综合运维管理提供基础,是轨道交通两化融合的桥梁,随着全自动无人驾驶线路在国内的不断增多,综合自动化系统的建设方案也将随着实践的情况不断地改进,必将在轨道交通运营管理和调度指挥中发挥更加重要的作用。
参考文献:
[1] 翟国锐,刘宏伟,师秀霞.下一代地铁车辆全自动无人驾驶信号系统关键技术 [J].都市快轨交通,2017,30(3):78-82.
[2] 郑伟.全自动无人驾驶模式下系统功能与场景分析 [J].城市轨道交通研究,2017,20(11):107-109+136.
[3] 李洁.简谈全自动无人驾驶系统车辆段/停车场信号系统设计 [J].铁路通信信号工程技术,2017,14(4):48-50.
作者简介:熊天圣(1983.08-),男,汉族,上海人,工程师,硕士,研究方向:轨道交通综合监控、智慧车站、智能运维等技术研究与工程实施;王克斌(1983.09-),男,汉族,上海人,工程师,硕士,研究方向:轨道交通智能化与信息化研究与工程实施。
