基于脑机接口的多人协同控制技术研究
2019-09-10胡怡芳
摘 要:脑机接口技术旨在维持人类神经系统灵活性的同时让武器装备的智能化水平更接近人类智慧,为人类神经系统和智能装备之间搭建桥梁。为了提高脑机接口的识别正确率,本文提出了一种多人协同的控制技术,通过多位被试同时进行运动想象任务,通过决策选取出最终控制指令进行输出,从而提高控制任务的准确率。
关键词:脑机接口;智能装备;多人协同控制
中图分类号:TN911.7;TP391.9 文献标识码:A 文章编号:2096-4706(2019)14-0024-03
Research on Multi-Person Cooperative Control Technology Based on
Brain-Computer Interface
HU Yifang
(The 27th Research Institute of China Electronic Science and Technology Group Corporation,Zhengzhou 450047,China)
Abstract:Brain-computer interface (BCI) technology aims to maintain the flexibility of human nervous system while bringing the intelligence level of weapon equipment closer to human intelligence and building a bridge between human nervous system and intelligent equipment. In order to improve the recognition accuracy of brain-computer interface (BCI),a multi-person collaborative control technology is proposed in this paper. Through the simultaneous motion imagination task of multiple subjects,the final control instructions are selected for output by decision-making,so as to improve the accuracy of the control task.
Keywords:brain-computer interface;intelligent equipment;multi-person collaborative control
0 引 言
近年來,随着科技水平的进步,脑机接口技术获得了长足的发展与进步。由运动想象产生的脑电信号作为一种自发性脑电信号,不需要通过外部刺激,只需被试进行自主意志的想象就可以完成控制,在使用时间上具有更高的灵活性,但同时也存在一些问题:(1)被试进行运动想象的能力参差不齐;(2)不同被试在进行同一任务时特征明显的大脑活动区域不一定相同;(3)被试进行试验时自身精神状态也会对测试结果有影响。为了尽可能减小影响,提高系统识别准确率,本文设计了一个用于多人同时进行运动想象任务的系统。
1 系统概述
基于运动想象的脑机接口系统是大脑和被控对象之间的一个软硬件结合的交互式通信系统。为了使系统具有良好的灵活性与可拓展性,设计系统具有以下模块:脑电信号采集模块、数据预处理模块、特征提取模块、分类识别模块、决策模块、控制指令模块以及交互模块。
脑电信号采集设备进行数据采集,提供给系统作为输入。由于脑电信号十分微弱,且具有随机性、非平稳、非线性等特点,故而对信号采集设备具有很高的要求。并且在数据分析之前需要对采集信号进行初步的预处理,剔除因外力或其他因素产生的明显的非正常信号,进而筛选出任务周期内的有效信号进行分析。预处理的过程主要分为三步,即基线校正、带通滤波、去眼电。
特征提取是脑机接口系统中的关键环节,其通过相关算法对预处理后的脑电信号数据进行量化处理,提取出可以区分不同思维任务的有效信息,特征提取的成果将直接影响系统识别的分类准确率。本系统采用改进的多类CSP算法提取运动想象脑电信号最优分量的特征,该算法采用多类信号协方差矩阵的近似联合对角化实现CSP算法的扩展,然后采用类别与空间滤波信号的最大互信息实现对最优滤波器的选择。
在获得特征向量后,需用分类器对脑电信号根据特征进行分类识别,常用的分类器有线性分类器(LDA)以及支持向量机(SVM)。本系统支持以上两种算法,可以由用户根据实验结果在交互模块中自由选择使用哪一种分类器进行在线实验。
在产生分类识别结果后,如果是单人实验状态,由决策模块直接发送识别结果反馈至交互模块或产生控制指令发送至外部设备;如果是多人实验状态,由决策模块收集每人的识别结果分析,最终输出一个结果反馈至交互模块或产生控制指令发送至外部设备。
此外,在交互模块中,由于用户的差异性,还可以根据用户自身情况自由选择进行数据采集的导联;并能够在实验时将系统的分类识别结果通过显示屏等方式反馈给被试,以便被试进行自我状态的调整。
根据需要,本系统主要设计了三种工作模式:离线训练模式、单人在线控制模式以及多人协同控制模式。
2 离线训练模式
由于不同被试在做同一个思维任务时脑电信号的特征是不同的,同一被试在不同时间做同一个思维任务时脑电信号的特征也不尽相同,因此每次执行控制任务之前,需要针对将要进行任务的被试对象进行离线训练,采集脑电数据并分析,得到当前状态下的脑电信号特征,以进行在线模式下的指令判别。
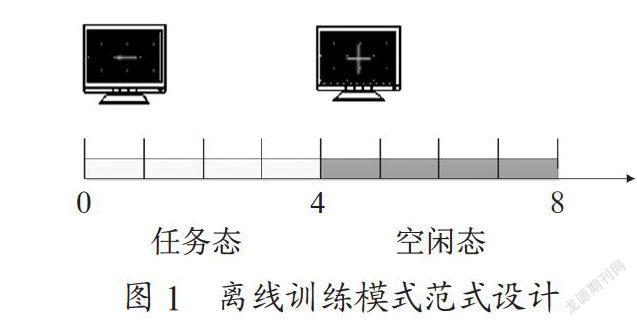
设定4s为一个任务周期(trial),在一个任务周期内,屏幕上出现向左(←)或向右(→)箭头,被试进行相应的运动想象任务,系统采集数据并记录存储。一个任务周期结束后,接下来4s为空闲周期,被试进行休息与状态调整。如此,任务周期与空闲周期穿插进行,如图1所示,每次训练包含50个任务周期。
在一次训练结束之后,对采集记录的前40个任务周期数据进行离线分析:经过预处理、特征提取、分类识别,得到数据的特征值和分类器参数,再根据后10个任务周期的数据进行分类结果的验证,并根据结果对参数进行修正,得到最终的特征值与分类器参数。
3 单人在线控制模式
在线控制模式是整个系统最主要的一个功能。它完成的是一个脑机接口系统最核心的工作:让被试通过自己的脑电信号来实时控制一个信息化装备。
对于单个被试来说,在线控制模式与离线训练模式类似,每4s为一个任务周期,在任务周期内,被试根据屏幕上的开始提示进行左/右手运动想象任务,由系统根据离线训练的结果进行数据处理和分类,得到左/右手运动想象识别结果,通过屏幕展示给被试。每一任务周期结束后,被试有4s空闲时间,在下一任务周期开始提示时再次进行想象任务。
在任务进行的过程中,被试的脑电信号通过脑电信号采集设备采集并放大,近一段时间的信号被储存在系统中以待分析。每经过一段时间,通过一个滑动窗口来取得最近一段时间的数据进行分析。每次滑动窗口取得的是一段n导(n为当前实验时选取的导联数),每个导包含2s脑电信号的时间序列,经过预处理实现对该段数据的降噪和去伪迹处理,预处理后的数据被同时发给分段模块,分段模块将数据按照配置好的系统参数分段,然后把这些数据段传递给特征提取模块。特征提取模块根据已训练好的程序提取相应特征量,然后交给分类识别模块,用训练好的模型进行分类和识别。最后,由系统产生一个结果来表示被试的运动想象方向,若系统连接外部设备,则可直接将其转化为控制指令,控制外部设备执行预设任务。
4 多人协同控制模式
对于大部分参与实验的被试来说,进行运动想象任务时系统识别的分类准确率并不是特别高,且通过训练难以获得较大进步。因此我们提出利用多人同时进行运动想象任务,进行协同控制,以解决这个问题。
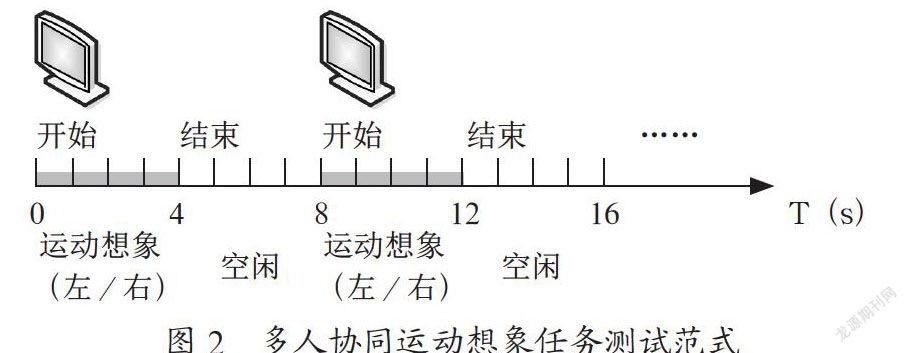
为了便于识别正确率的判别与统计,参考离线训练模式进行实验范式的设计,如图2所示。向左、向右和空闲三种状态提示指令通过图像在屏幕中随机出现,每4s为一个任务周期,每次試验有60个任务,左、右各有15个任务,空闲态有30个任务。
参与实验的三位被试同时接受相同提示,各自进行运动想象任务,由系统分别进行每人识别结果的判别,记录并发送至系统决策模块,同时计算与更新当前此被试的识别正确率。系统进行决策判定时,参考每位被试的识别正确率,对收集到的识别结果进行加权计算,得出一个最终结果并输出。并在每个任务周期结束后,实时调整权重值,以提高正确率。
5 实验设计
在实验之前,精心选择受试对象,需要选择身体健康、没有精神疾病、矫正视力正常的年轻的受试者。被试与脑电采集系统均在屏蔽室中,室内灯光适中,以减少由于视觉变化而产生的伪迹和注意力分散。被试坐在一个舒适的高靠背椅子上,全身肌肉处于放松状态,不产生任何的肌肉紧张与实际运动。
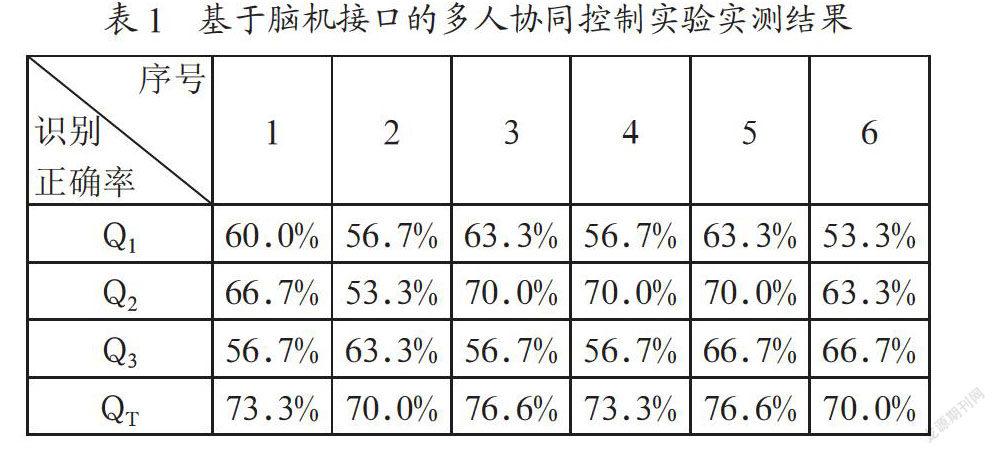
根据进行运动想象时的脑电活跃区域给被试选择合适的导联进行连接,进行阻抗检测无异常后开始实验。实验过程如下:(1)要求被试注意屏幕的提示图形,执行相应的思维任务。每位被试分别进行一组离线训练实验,记录数据,进行离线分析后建立每位被试的运动想象信号离线模型。(2)三位被试进行多人协同实验,利用已建立的数据模型进行在线分析,分别计算并记录每位被试识别正确率Q1、Q2、Q3;同时分析产生三人协同控制的结果,记录并计算三人协同下系统统计识别的正确率QT。(3)分别对比QT与Q1、Q2、Q3。实验结果如表1所示。
6 结 论
本文提出了一种由多人同时进行运动想象任务,从而进行协同控制的技术。通过多人的识别结果由系统进行计算判别并产生决策,以解决有些人员运动想象任务识别率不高及状态不稳定等问题。重点介绍了系统的三种工作模式,即离线训练模式、单人在线控制模式以及多人协同控制模式。并且详细介绍了进行多人协同控制的实验过程。
经多次实验证明,由多人协同进行运动想象任务,经系统分析判定产生最终决策的识别正确率相比较于以往单人任务的识别正确率有了较大幅度的提高,降低了由于被试自身运动想象信号特征不明显、实验状态不稳定等不确定因素带来的影响,是一种有效的控制方法。
参考文献:
[1] 马留洋.基于虚拟现实的运动想象脑—机接口训练系统 [D].郑州:郑州大学,2017.
[2] 马腾.基于mVEP和MI多模态脑机接口的关键技术研究 [D].成都:电子科技大学,2018.
作者简介:胡怡芳(1988-),女,汉族,河南南阳人,工程
师,硕士研究生,研究方向:生物电子、脑机接口。
