左右转角式平衡车平衡机理
2019-09-10杨青青
杨青青
摘 要:我们提出一种新的自平衡车控制保持的方式,改变传统的以前后直立式,通过控制加速度来获得平衡的方式。而改为用陀螺仪测量车体的左右倾角,反馈给单片机中央处理芯片,再由芯片处理过后反馈给舵机,有舵机的扭力调整龙头的倾角实现平衡。
关键词:舵机、陀螺仪
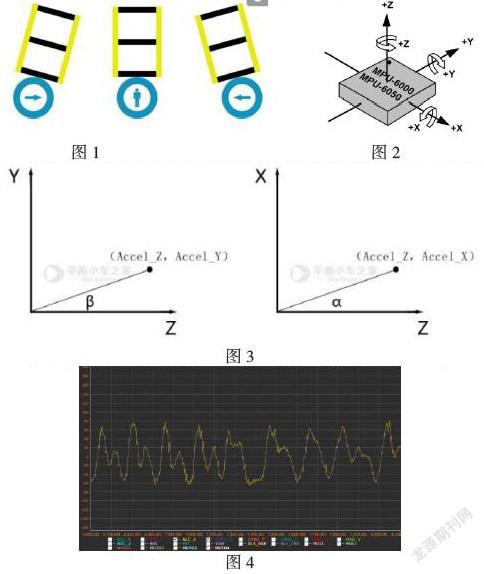
随着科技的发展,无人平衡车慢慢进入人们的视线,电动平衡车,又叫体感车、思维车、摄位车等。市场上主要有独轮和双轮两类。其运作原理主要是建立在一种被称为“动态稳定”(DynamicStabilization)的基本原理上(如图1)。
但这种平衡车利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动电机进行相应的调整,以保持系统的平衡。是现代人用来作为代步工具、休闲娱乐的一种新型的绿色环保的产物。但有两个较为明显的缺点,第一个是安全性,前后靠控制加速度来获得平衡的方式一旦车体倾倒,肯定是向前或者向后方向的倾倒,这时候由于人的脚踩在平衡车上,最先着地的一定是人的头部,比较危险。第二个就是频繁的加减速电机的伤害会非常大。
而我们的车体平衡则是人左右方向的平衡。具体的原理打个形象的比方和自行车平衡的原理比较相似。只不过控制“龙头”转角的人手变成了我们的大扭力舵机,下达指令的大脑变成了我们的单片机芯片。
最为核心的部分是倾角的测量。倾角的测量非常的关键,是我们信息实时采集最为重要的数据。我们使用的芯片是MPU6050三轴陀螺仪,它能够精确的测量倾角。理想情况下,我们只需要测量某一个方向上的加速度值,然后这样就可以计算出小车的倾角,例如Y轴,X轴。我们的小车静止的时候,只存在重力加速度,没有运动加速度,此时X轴和Y轴都输出零。当小车有了一定的倾角后,重力加速度就会在X轴或Y轴上有分量,我们使用atan2(y,x)函数来说明,
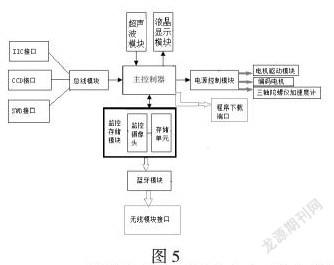
航模电池的T型接口是整块板以高容量的航模电池供电,这种电池的优点是体积小,供电稳定。主开关控制整块板子的电流通断。电机驱动TB6612有点类似与从前的LM289系列,只不过随着工艺的改进,能够的更小。编码器电机接口1、2,线性CCD接口都是我们预留的,实际并未用到,只是我们考虑到随着进一步的开发,会有更多的开发需求预留在板子上。本块板子最核心的部分就是MPU6050三轴陀螺仪加速度计,(PU-60X0是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(DigitalMotionProcessor),可用I2C接口連接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。MPU-60X0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器,这里我们能用它感知倾角和实时的运动状态,生成数据。
而对于NRF24L无线模块接口则是接受手机端或其他终端发过来的控制信息,达到远程控制或远程接收的效果。SWD调试接口连接STM32,程序下载接口是我们将把外部程序烧写进芯片使用的,OLED显示屏实时显示自行车的实时运行参数,用户按键是在总电源打开的状态下用户启动小车芯片的按键,STM31103F是主芯片,类似于“CPU”的功能。这里值得一提的是我们的超声波接口,超声波会测出小车与前方可能有的障碍物之间的距离,一旦低于一定的限度,车体会强制停车,保护安全。
参考文献:
[1]杨莘,刘海涛.基于STM32的两轮自平衡小车[J].数字技术与应用,2014,05:151-152.
[2]季鹏飞,朱燕,程传统,杜晓.基于STM32的两轮自平衡小车控制系统设计[J].电子科技,2014,11:96-99+105.
