基于众为兴AR6520机器人与AVS视觉定位的不同工件分拣系统研究
2019-09-10周尧鑫
周尧鑫

摘 要:本文通过众为兴AR6520四轴机器人与AVS视觉定位系统,以以太网通信的方式,利用ADTVision视觉软件对不同图形标注的工件进行识别,并用机器人进行静态抓取分拣。
关键词:机器人;视觉;以太网;ADTVision
中图分类号:TP241;TP391.41 文献标识码:A 文章编号:1003-5168(2019)19-0038-03
Abstract: In this paper, by means of Ethernet communication between the 4-axis AR6520 robot and AVS visual positioning system, ADTVision visual software was used to identify the workpiece marked by different graphics, and the robot was used for static fetching and sorting.
Keywords: robotics;vision;Ethernet;ADTVision.
机器人视觉技术是指智能相机和计算机相结合,以模拟人类的视觉功能。这一技术在3C领域①、汽车零部件的生产、制药等领域有着日益广泛的应用。SCARA(Selective Compliance Assembly Robot Arm)②机器人因具有较高的速度、精度、高度以及安装空间小、设计自由度大等优点而得到大规模应用。目前,应用于装配线上的工业机器人大多是通过示教操作来完成机器人的动作,这样的生产线柔性较差,无法满足对柔性生产系统③的要求,即实现对物料的识别和定位抓取。因此,要使机器人顺利并且高效地完成工作任务,则需要引入机器人视觉技术以完成对工作目标的识别及定位。
1 任务控制要求
本文主要研究如何利用AVS视觉定位系统分辨不同图案的工件,并由机器人完成对不同图案工件的分拣。
任务示意图如图1所示。图1中有4个不同图案的工件,SB1为启动按钮,SB2为复位按钮。控制要求为按下复位按钮SB2,机器人自动回原点;手动将随机选取的工件放入取料点,按下启动按钮SB1,视觉系统自动识别工件,然后机器人将工件搬入每个图案对应的工位(如1号图案对应1号工位),工件放置完毕后,机器人自动返回原点,等待下一次启动[1]。
2 硬件组成和硬件连接
2.1 硬件组成
众为兴AR6520四轴机器人。微型工控机AMC2000E:摄像机通过网口和主机进行数据交换;信号的输入、输出控制及摄像机的供电均由I/O接口实现;指示灯用于指示摄像机的工作状态。MER系列相机:GIGE千兆网,500万像素,1 628(H)×1 236(V),cCMOS类型,帧率为14fps,外部触发或软触发,工作电压12V。Computar镜头:12mm,1∶1.4,2/3定焦。平面LED光源。显示器、鼠标、键盘、点动按钮。
2.2 硬件连接
将视觉控制器连接到24V开关电源上,连接好相机的电源线、I/O控制线(由机器人外部触发)和千兆网线[2]。相机的千兆网线必须连接到相机专用千兆网口中(GbE3口),视觉控制器与机器人控制器间用普通网线连接。显示器连接到显示器接口,键盘、鼠标连接到USB口。控制按钮SB1、SB2分别连接到机器人控制器的数字输入端IN1、IN2。
3 软件组成
本项目所需的软件有相机驱动、加密狗驱动、ADTvision和LUA机器人程序编辑调试[3]。
3.1 相机驱动设置
双击启动桌面上的
如果网卡IP地址和相机地址不在同一网段时,相机IP地址会以红色显示。此时,可以修改网卡的IP地址,也可以直接在该界面修改相机的IP地址,必须保证网卡IP地址和相机IP地址的前3个数字段一致,最后一个可以不同。修改好IP地址后,相机的IP地址如果以黑色显示则表示修改成功,此时点击保存设置就可以退出该程序。
同理,视觉控制器与机器人间普通网口的IP地址也必须在同一网段内,既可以在视觉控制器的网络连接中修改,也可以修改机器人的IP地址,以保证两个IP地址在同一网段中。
在本任务中,笔者使用相机(192.168.1.112)和机器人(192.168.0.123)的默认IP地址,将控制器中与相机关联的IP地址设置为192.168.1.10,与机器人关联的IP设置为192.168.0.10。
3.2 视觉系统的图像采集
视觉系统的作用是将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算以抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
3.2.1 ADTvision软件界面。ADTvision软件界面上边为工具栏,左边为工具箱,中间为作业流程区。
工具箱共有以下4大类。图像工具用于图像采集、存储和相机参数设置等;定位工具用于模板操作以及设置定位算法参数;标定工具将像素坐标转化成用户坐标;通信工具设置串口和网口参数,与外部设备进行通信。
创建作业流程时,根据实际工作需要,用鼠标拖动工具箱中相应的工具到流程列表即可,右鍵菜单中可以删除不需要的工具。一般情况下,只需要采集图像、边缘定位、坐标定位和以太网4个工具即可。本任务中需要选取采集图像、区域定位、边缘定位、以太网4个工具。
3.2.2 以太网设置。当视觉控制器作为服务器时,需要设置正确的服务器IP地址。此时,需要将视觉控制器中普通网口的IP地址设置到这里,并且要先打开网口,外部设备才能连接到服务器进行通信,主要参数设置如下。服务器IP:192.168.0.123;服务器端口:110;协议类型:UDP;连接模式:客户端;站号:1;本地IP:192.168.0.10;本地端口:2000。
无论是串口通信还是网口通信,在软触发时,如果外部设备发送的是“[0]”命令,则视觉软件执行一次0号相机的定位操作,并将定位结果传回给外部设备;如果外部设备发送的是“[1]”命令,则视觉软件执行一次1号相机的定位操作,并将定位结果传回给外部设备。
3.2.3 采集圖像及其设置。采集图像主要是通过设置、调节摄像机以获取清晰的现场图片。
将“采集图像”拖取到作业流程界面,“打开设备”进行参数设置,然后“保存参数”并“加载参数”。使用硬件触发定位,触发模式为on。静态IP设置为相机IP,即192.168.1.112。
3.2.4 边缘定位创建模板。边缘定位创建模板主要是根据目标的形状轮廓来寻找定位目标,适合用来寻找有任意旋转角度、任意缩放比例、任意对比度反差和局部遮挡的目标,不适合寻找边缘模糊和有噪声的目标。
点击工具栏中“连续采集”按钮<C:\Users\hnkj\Desktop\河南科技(创新驱动)2019年第19期_103998\Image\image3_1.png>,将模板对象放在相机下,进行图像连续采集。将“边缘定位”拖取到作业流程界面。打开“边缘定位”设置窗口,其中“模版匹配最低分”表示图像中找到的目标和模版的匹配率,可设“0—100”,设置过低会造成误识别,设置过高会造成识别不了,一般设置为70—80。
创建模板,输入模板名称,双击模板在“边缘模板学习”窗口设置,选择“单ROI模式”和“圆形ROI”,用圆形框选取瓶盖外缘形成清晰的绿色边缘为所需的模板,点击“创建模板”完成模板创建的流程。
经分析,本任务4个图形中除了空心三角形和实心三角形的轮廓比较相似,其他图形相互的轮廓都有很大区别。所以,根据“边缘定位”工具特性,空心三角形和空心长方形使用“边缘定位”工具创建模板,实心圆形可以用“边缘定位”也可用“区域定位”。本任务中实心圆形使用“边缘定位”工具创建模板,模板名为对应的图形编号。
3.2.5 区域定位创建模板。区域定位模板主要是根据目标区域的像素灰度来寻找定位目标,适合用来寻找有噪声和污损的目标,不适合寻找任意旋转角度和缩放比例的目标,通常情况下都会需要任意的角度信息。
区域定位模板的创建步骤与边缘定位模板的创建基本相同,只是在用圆形框选取模板区域时,区域模板圆形框必须包含瓶盖边沿,形成的绿色边缘为所需模板。
经分析,本任务中的实心三角形使用“区域定位”工具创建模板,以便于与空心三角形进行区分,模板名为对应的图形编号,创建模板。
3.3 相机作业设置
选择“绝对位置”,勾选“模板名称”。
3.4 AR8520机器人参数设定
3.4.1 视觉配置。在机器人工程目录下添加视觉,进入“视觉配置”,选择“CAM0”相机,“UDP”网络模式,IP为视觉控制器中与机器人连接的IP,网络触发格式要与“相机作业设置”中输出内容勾选的一致。
3.4.2 编写机器人程序并加载。打开“LUA机器人程序编辑”软件,编写程序并保存后,使用示教器将保存的程序加载到机器人控制器中,并对相关位置点进行示教。
4 总结
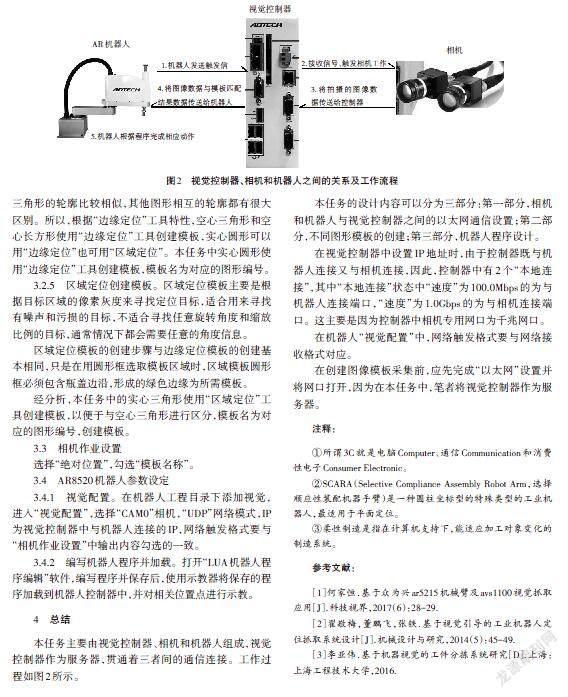
本任务主要由视觉控制器、相机和机器人组成,视觉控制器作为服务器,贯通着三者间的通信连接。工作过程如图2所示。
本任务的设计内容可以分为三部分:第一部分,相机和机器人与视觉控制器之间的以太网通信设置;第二部分,不同图形模板的创建;第三部分,机器人程序设计。
在视觉控制器中设置IP地址时,由于控制器既与机器人连接又与相机连接,因此,控制器中有2个“本地连接”,其中“本地连接”状态中“速度”为100.0Mbps的为与机器人连接端口,“速度”为1.0Gbps的为与相机连接端口。这主要是因为控制器中相机专用网口为千兆网口。
在机器人“视觉配置”中,网络触发格式要与网络接收格式对应。
在创建图像模板采集前,应先完成“以太网”设置并将网口打开,因为在本任务中,笔者将视觉控制器作为服务器。
注释:
①所谓3C就是电脑Computer、通信Communication和消费性电子Consumer Electronic。
②SCARA(Selective Compliance Assembly Robot Arm,选择顺应性装配机器手臂)是一种圆柱坐标型的特殊类型的工业机器人,最适用于平面定位。
③柔性制造是指在计算机支持下,能适应加工对象变化的制造系统。
参考文献:
[1]何家恒.基于众为兴ar5215机械臂及avs1100视觉抓取应用[J].科技视界,2017(6):28-29.
[2]翟敬梅,董鹏飞,张铁.基于视觉引导的工业机器人定位抓取系统设计[J].机械设计与研究,2014(5):45-49.
[3]李亚伟.基于机器视觉的工件分拣系统研究[D].上海:上海工程技术大学,2016.
