基于AMESIM混合动力汽车模式切换仿真分析
2019-09-10张健王玉林李志明耿超
张健 王玉林 李志明 耿超


摘要: 针对混合动力汽车动力模式切换的品质控制对动力性能和驾驶性的影响,本文提出了一种新型插电式混合动力装置,实现了多种动力模式。基于AMESim软件建立插电式混合动力行星齿轮系统仿真模型,模拟纯电模式下单电机驱动模式和混合动力模式两种模式的切换过程,分析车辆动力模式转换过程,并以驱动模式切换瞬间的电机转矩、转速和车速作为车辆模式切换初始条件,并进行模拟仿真分析。仿真结果表明,在模式切换过程中,车辆冲击小于德国冲击限值10 m/s3,证明该模式切换平稳且对整车影响很小。本文提出的新型混合动力系统在满足动力性能要求的前提下,具有较高的模式切换品质,对混合动力结构开发具有借鉴意义。
关键词: 混合动力; 模式切换; AMESim; 冲击度
中图分类号: U463.5 文献标识码: A
插电式混合动力电动汽车(plug in hybrid electric vehicle, PHEV)是传统汽油车到纯电动汽车的过渡车型,它的动力源包括发动机和电动机[1],动力模式选择及功率分配是混合动力汽车技术中的难题之一[2]。目前有关混合动力控制策略的研究在制定混合动力车辆工作模式、模式切换条件[37]和模式切换的协调控制[811]等方面打下了基础。混合动力车辆动力模式存在多种形式与组合,因此存在模式切换时的品质评价问题[12]。目前,许多学者对混合动力动态过程控制问题进行研究。童毅等人[13]提出了“发动机转矩开环+发动机动态转矩估计+电机转矩补偿”的控制算法;I.D.Roy等人[14]提出建立发动机状态观测器,利用汽车启动发电一体机(integrated starter generator, ISG)消除发动机转矩波动,以上研究均利用了电机转矩的快速补偿作用。因此,本文基于AMESim软件,建立插电式混合动力行星齿轮系统仿真模型,对混合动力模式切换过程进行研究,以驱动模式切换瞬间的电机转矩、转速和车速作为车辆模式切换初始条件,并进行模拟仿真分析。仿真结果表明,该新型混动系统在动力模式切换过程中具有较高的品质控制。该方案具有一定的可行性。
1 新型混合动力系统
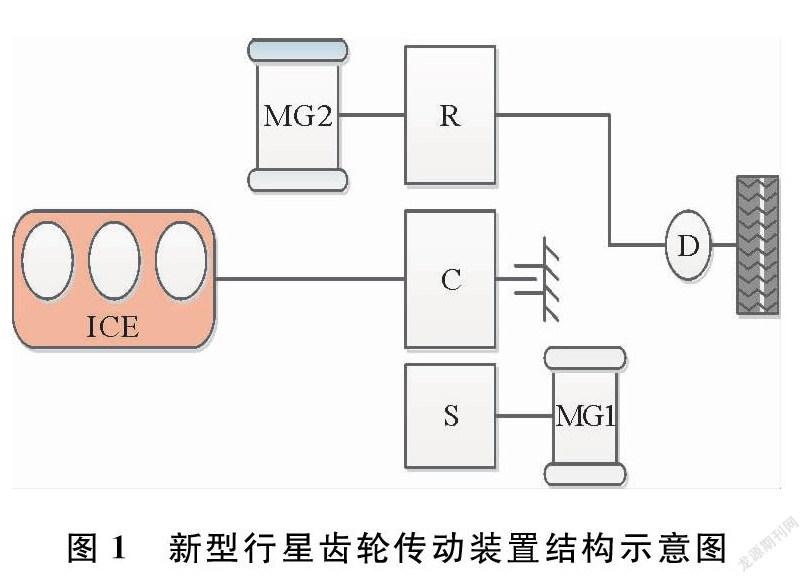
本文提出的新型混合动力系统装置主要包括发动机、电动机、发电机和单行星排,电机MG1连接太阳轮,发动机连接到行星架,电机MG2连接到齿圈,并通过齿圈向外输出动力。该装置与丰田Prius的传动系统不同之处在于车架与行星架之间增加了制动器部件,通过控制制动器的接合和断开,切换车辆的动力模式。制动器接合时,发动机和行星架停止工作,车辆进入纯电动模式,纯电动模式又分为单电机驱动和双电机共同驱动两种方式。相较于丰田Prius,新的混合动力系统增大了动力电池的容量,发电机MG1的输出功率也随之增大,降低了发动机的额定功率,不仅可以满足新标准下的纯电动续航范围要求,而且降低了油耗,利于节能减排。本文研究的插电式混合动力车型,选用目前市场上某国产运动型实用汽车(sport utility vehicle, SUV)作为目标车型,其基本参数及性能指标如表1所示。本文提出的插电式混合动力汽车设计的性能指标如表2所示。新型行星齿轮传动装置结构示意图如图1所示。
2 传动系统装置模型建立
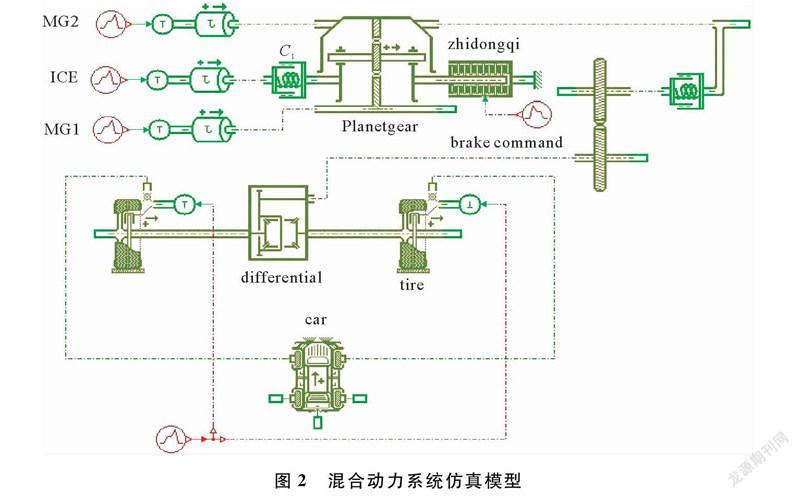
本文基于AMESim軟件及图1中新型传动装置结构,建立混合动力系统仿真模型,混合动力系统仿真模型如图2所示。图2中,ICE为发动机;MG1为发电机;MG2为电动机;planetgear为单行星排;C1为减震器;tire为轮胎;differential为差速器;brake command为制动信号。C1为减震器与行星轮系行星架连接,接受来自发动机的动力,行星架的另一端连接制动器,根据输入制动信号,结合与断开制动器。
3 系统模型仿真分析
本文研究的混合动力汽车模式切换品质主要指冲击度[15],而平顺性采用冲击度作为主要评价指标[16]。模式的切换过程是实现各模式及油耗性能和驾驶性能的保证[1719],提高了燃油效率。针对不同的行驶工况和电池荷电状态(state of charge,SOC),整车控制系统会选择合适的驱动模式[20],重点计算发电机的扭矩[21]。接下来分析几种具有代表性的动力模式切换过程。
3.1 电机MG1至电机MG2驱动模式切换
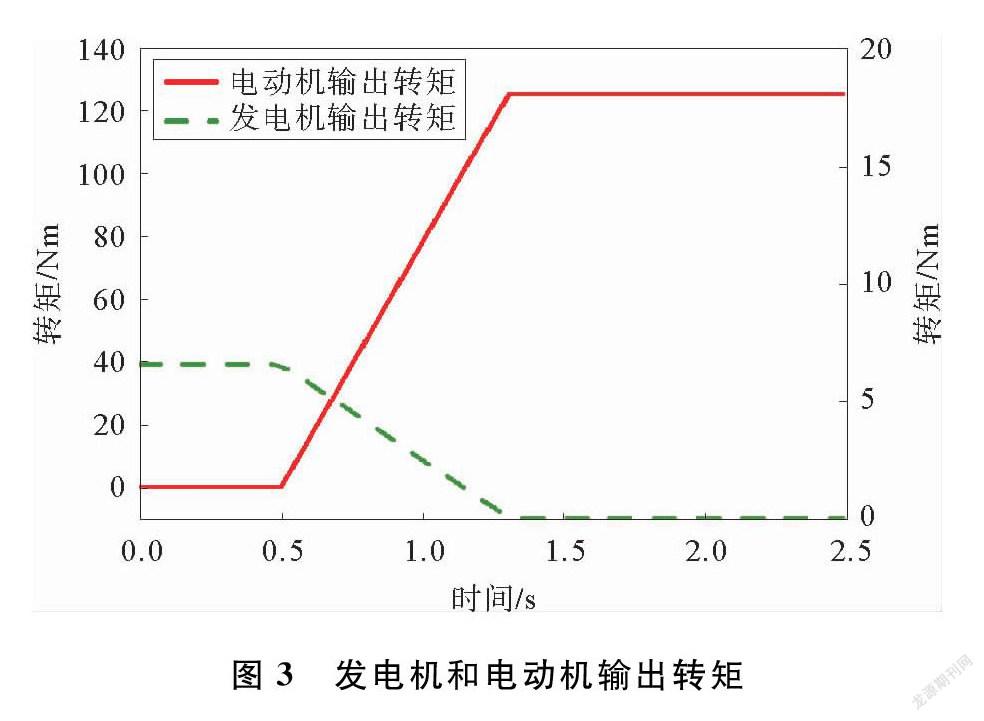
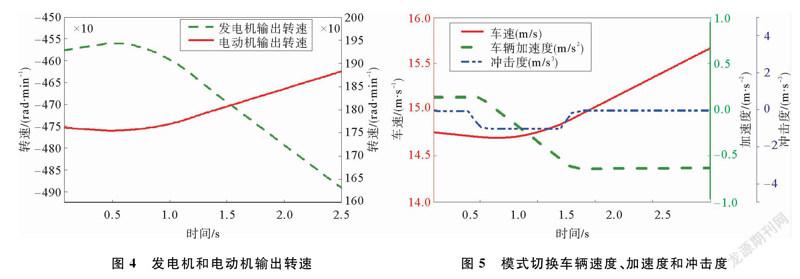
在纯电动单电机驱动模式中,当由发电机MG1驱动切换至MG2驱动时,电机转矩、转速和车速作为初始条件输入模型,发电机和电动机输出转矩如图3所示,发电机和电动机输出转速如图4所示,模式切换车辆速度、加速度和冲击度如图5所示。由图3可以看出,车辆在0.5 s时开始模式切换,电动机转矩增加,发电机转矩逐渐下降,当电动机输出转矩在1.3 s时,电动机转矩由0 Nm升至125 Nm之后,趋于稳定,发电机输出转矩由6.5 Nm降至0 Nm,完成模式切换过程,此时车辆转变为由MG2单独驱动;由图4可以看出,发电机和电动机转速均逐渐增加;由图5可以看出,车辆加速度先下降至14.3 m/s2,之后稳定。车辆在此段行驶过程中的最大冲击度仅为-0.8 m/s3,小于限值10 m/s3[22],说明此段切换过程品质较高,对整车的冲击度控制在合理范围内。
3.2 电机MG2至双电机驱动模式切换
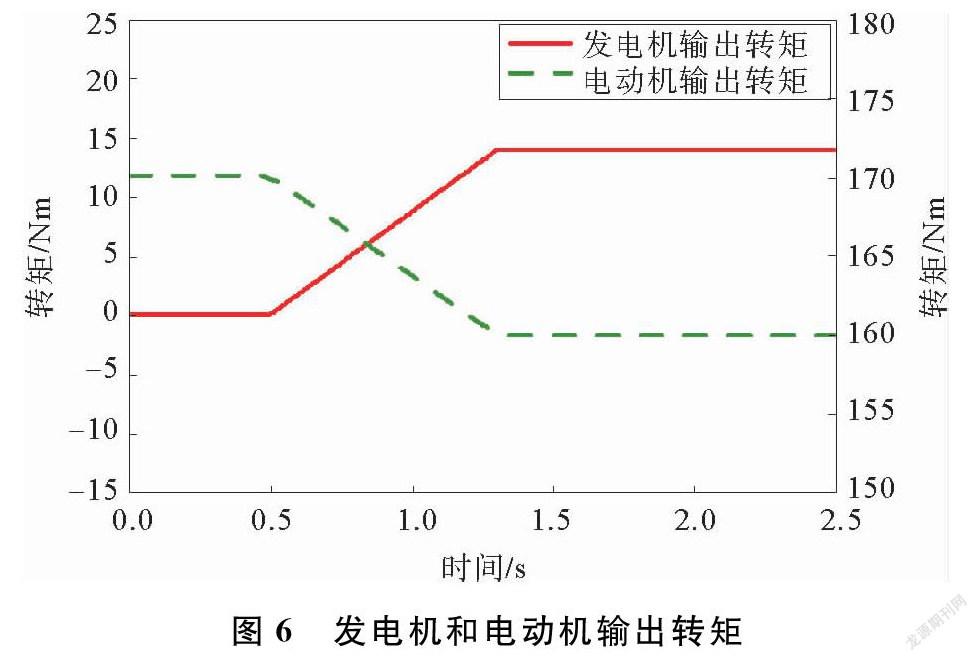
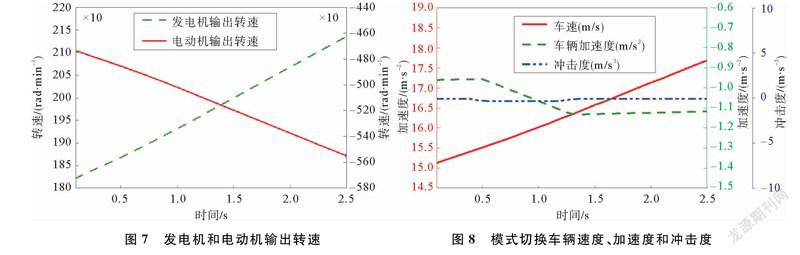
在纯电动模式下,电机MG2切换至双电机驱动时将模式切换瞬间的电机转矩、转速和车速作为车辆模式切换仿真的初始条件输入模型,发电机和电动机输出转矩如图6所示,发电机和电动机输出转速如图7所示,模式切换车辆速度、加速度和冲击度如图8所示。车辆在0.5 s时开始切换模式过程,1.3 s时完成。由图6可以看出,电动机输出转矩初始值为170 Nm,在1.3 s时降至160 Nm,发电机输出转矩值由0 Nm升至14 Nm;由图7可以看出,发电机与电动机的转速均逐渐增加。
由图8可以看出,车辆速度增加平缓,此时由双电机共同驱动。在该模式切换期间车辆的最大冲击度为-0.3 m/s3,远小于10 m/s3,表明此模式切换过程平缓,且产生的冲击对车辆的影响较小。
3.3 发动机MG1和MG2至电机MG1和MG2驱动模式切换
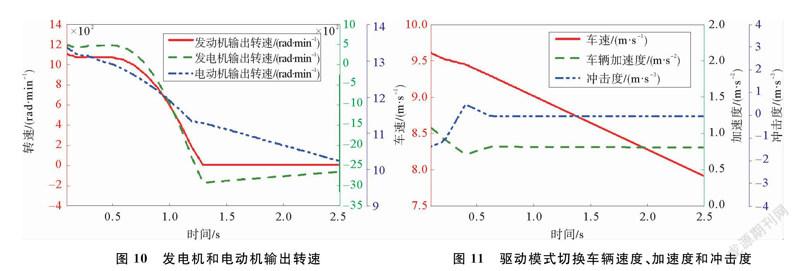
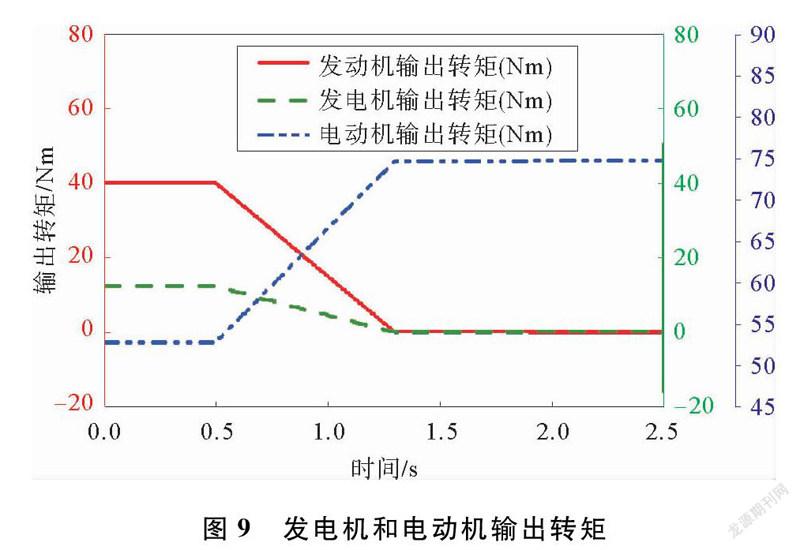
将车辆由发动机MG1和MG2驱动至电机MG1和MG2,驱动模式切换瞬间的电机转矩、转速和车速作为车辆模式切换仿真的初始条件,发电机和电动机输出转矩如图9所示,发电机和电动机输出转速如图10所示,模式切换车辆速度、加速度和冲击度的仿真结果如图11所示。在0.5 s时开始模式切换过程,在1.3 s时完成。
由图9可以看出,发动机、发电机和电动机初始输出转矩值分别为40 ,39 ,67 Nm,在1.3 s左右时,发动机输出转矩降至0 Nm,发电机输出转矩升至94 Nm,电动机输出转矩升至85 Nm;由图10可以看出,发动机转速降至零停止工作,MG1和MG2转速均逐渐增加,此时车辆由双电机驱动;由图11可以看出,车速逐渐下降且下降平缓,车辆在此段行驶过程中的最大冲击度仅为-0.6 m/s3,表明此切换过程对整车的沖击度控制在合理范围内。
3.4 电机MG2至电机MG1驱动模式切换
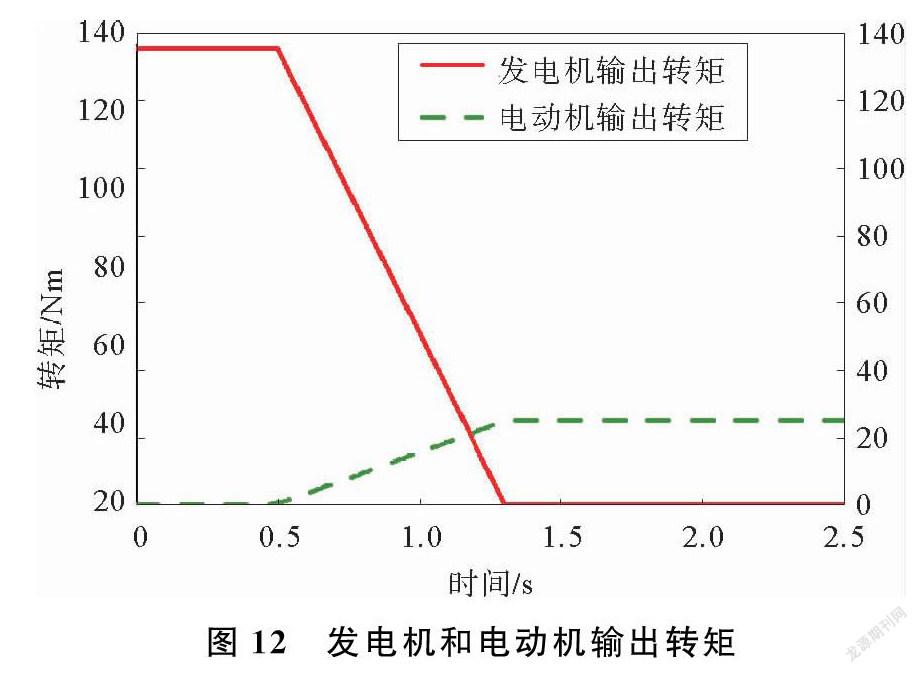
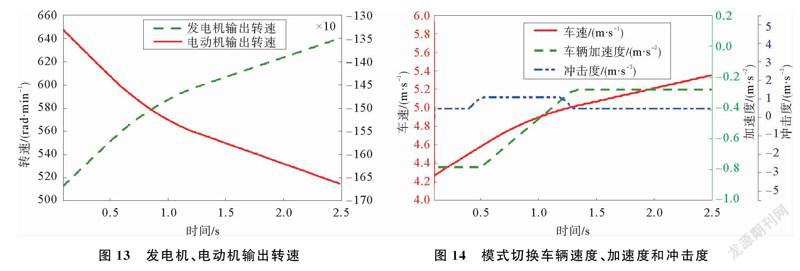
在纯电动单电机驱动模式下,当电机MG2切换至电机MG1时,以切换瞬间的电机转矩、转速和车速作为模式切换仿真的初始条件输入模型,发电机和电动机输出转矩如图12所示,发电机和电动机输出转速如图13所示,模式切换车辆速度、加速度和冲击度如图14所示。
车辆在0.5 s时开始模式切换过程,在1.3 s时模式切换过程完毕。由图12可以看出,电动机输出转矩由140 Nm降至0 Nm,发电机输出转矩由0 Nm升至23 Nm;由图13可以看出,MG1和MG2的转速均逐渐增加。
由图14可以看出,车辆速度缓慢增加,车辆加速度在模式切换开始时逐渐增加1.3 s模式切换完成后稳定。车辆此段行驶过程中的最大冲击度为0.7 m/s3,表明此切换过程对整车的冲击度控制在合理范围内。
4 结束语
本文介绍了一种新型插电式混合动力系统,根据新型混合动力系统原理图,建立了车辆动力模式切换的AMESim仿真模型,利用进行标准循环工况过程中动力模式切换瞬间的发动机、发电机和电动机的输出转矩、转速及车速数据作为输入的初始条件,对几种有代表性的动力模式切换过程模拟仿真。仿真结果表明,选取的几种模式切换过程中车辆无动力中断,且车辆动力模式切换过程对整车的冲击影响很小,能够实现高品质的动力模式切换。该研究能够高品质的实现多种动力模式的控制与切换,对以后混合动力系统的开发具有参考意义。
参考文献:
[1] 姜顺明, 周柯. 插电式混合动力汽车预测控制策略的研究[J]. 机电工程, 2017, 34(1): 8893.
[2] 王庆年, 段本明, 王鹏宇, 等. 插电式混合动力汽车动力传动系参数优化[J]. 吉林大学学报: 工学版, 2017, 47(1): 17.
[3] Salmasi F R. Control strategies for hybrid electric vehicles: evolution, classification, comparisonand future trends [J]. IEEE Transactions on Vehicular Technology, 2007, 56(5): 23932404.
[4] Wirasingha S G, Emadi A. Classification and review of control strategies for plug—in hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2011, 60(1): 111122.
[5] Chau K T, Wong Y S. Overview of power management in hybrid electric vehicles[J]. Energy Conversion and Management, 2002, 43(15): 19531968.
[6] Mansour C, Clodic D. Optimized energy manage ment contr01 for the toyota hybrid system using dynamic programming on a predicted route with short computation time[J]. International Journal of Auto motive Technology, 2012, 13(2): 309324.
[7] Minh V T, Rashid A A. Modeling and model predictive control for hybrid electric vehicles[J]. International Journal of Automotive Technology, 2012, 13(3): 477485.
[8] Koprubasi K, Westervelt E R, Rizzoni G. Toward the systematic design of controllers for smooth hybrid electric vehicle mode changes[C]∥American Control Conference, New Tork, IEEE, 2007: 29852990.
[9] 王庆年, 冀尔聪, 王伟华. 并联混合动力汽车模式切换过程的协调控制[J]. 吉林大学学报: 工学版, 2008, 38(1): I6.
[10] 赵治国, 何宁, 朱阳, 等. 四轮驱动混合动力轿车驱动模式切换控制[J]. 机械工程学报, 2011, 47(4): 100109
[11] 杜波, 秦大同, 段志辉, 等. 新型并联式混合动力汽车模式切换协调控制[J]. 中国机械工程, 2012. 23(6): 739744.
[12] 王伟华, 王文楷, 冯博, 等. 并联式混合动力汽车驱动模式切换协调控制方法[J]. 交通运输工程学报, 2017, 17(2): 9097.
[13] 童毅, 欧阳明高, 张俊智. 并联式混合动力汽车控制算法的实时仿真研究[J]. 机械工程学报, 2003, 39(10): 158160.
[14] Roy I D, Robert D L. Engine torque ripple cancellation with an integrated starter alternator in a hybrid electric vehicle: implementation and contr01[J]. IEEE Transaction on Industry Application, 2003, 39(6): 20162018.
[15] 王永俊. 單电机强混合动力汽车驱动模式切换的动态协调控制策略[D]. 重庆: 重庆大学, 2014.
[16] 罗玉涛, 王敷玟. 机电无级传动混合动力驱动系统的模式切换协调控制[J]. 汽车工程, 2015(5): 526532.
[17] 王磊. 一种混联式混合动力客车能量管理及模式切换协调控制研究 [D]. 上海: 上海交通大学, 2013.
[18] 童毅. 并联式混合动力系统动态协调控制问题的研究[D]. 北京: 清华大学, 2004.
[19] 孔慧芳, 王瑞, 鲍伟. 混合动力汽车EH模式切换中扭矩协调控制策略研究[J]. 合肥工业大学学报: 自然科学版, 2017, 40(3): 290294.
[20] 汪东坪. 深度混合动力汽车整车系统控制技术研究[D]. 南京: 南京航空航天大学, 2013.
[21] 颜伏伍, 潘庆庆, 杜常清. 并联混合动力汽车从纯电动切换至发动机驱动的控制研究[J]. 汽车技术, 2009(1): 3034.
[22] 胡明辉, 陈爽, 曾剑峰. 双电机耦合系统驱动模式切换控制策略研究[J]. 机械工程学报, 2017, 53(14): 5967.
