柔性关节机器人的模糊反步自适应位置控制
2019-09-10薛晔于海生吴贺荣
薛晔 于海生 吴贺荣


摘要: 为实现柔性关节机器人的高精度位置跟踪控制,本文提出了基于模糊逼近的反步自适应控制方法。该方法将隐极式永磁同步电机(permanent magnet synchronous motor,PMSM)作为驱动系统,建立二自由度柔性关节机器人的系统模型,设计反步自适应位置控制器,并利用模糊逻辑系统,逼近虚拟控制器导数项,解决高阶系统反步控制器结构复杂的问题。考虑到无力矩传感器的情况,引入电机负载转矩观测器,结合电机矢量控制策略,设计了反步电流控制器,保证驱动电机有较快的动态响应。同时,利用Lyapunov稳定性定理,对柔性关节机器人控制系统进行稳定性分析,证明整个系统为渐近稳定。仿真结果表明,本文采用的模糊反步自适应位置控制器,能够实现柔性关节机器人高精度位置跟踪控制,响应速度快,驱动电机的转矩波动小,控制器结构简单。该研究在机器人驱动系统中具有广泛的应用前景。
关键词: 柔性关节机器人; PMSM; 反步法; 模糊控制
中图分类号: TP242.2; TM921.47; TP276 文献标识码: A
随着机器人系统向高精度、大负载和轻质量方向发展,柔性关节机器人因体积小和能耗低具有高负载/自重比的优势,更多地应用于空间探索、人机协作、家庭服务等领域[1]。相比刚性关节,柔性关节引入了额外的自由度,电机转角与机械臂连杆转角不同步,不但减慢了系统的响应时间,而且容易引起机械臂振动,增加机器人建模和控制难度[2]。柔性关节机器人的位置控制已有众多研究成果,基于无源控制理论的控制,虽然力矩波动小,稳态精度高,但动态精度无法保证[34];奇异摄动控制法可对系统进行快、慢变子系统分解,降低了高阶系统控制器的设计难度,对机械臂刚度有较大要求[56];反步控制方法对机械臂刚度没有限制,响应速度快,但计算量大,结构复杂,制约控制精度[78];滑模控制方法鲁棒性强,但滑模控制无法消除抖振,造成力矩波动过大[911]。这些控制方法都可以实现柔性关节机械臂的高精度位置跟踪,但大多研究仅针对柔性关节,而不考虑驱动电机,缺乏可实践性。PMSM能耗低、效率高、可靠性强,广泛应用于机器人驱动系统中[12]。基于此,本文对隐极式PMSM驱动的二自由度柔性关节机器人建模,基于模糊万能逼近定理,设计柔性关节反步自适应位置控制器,考虑力矩传感器的经济成本,利用负载转矩观测器估计电机负载转矩,并结合永磁同步电机矢量控制策略,通过q轴电流与电机负载转矩的映射关系,设计反步电流控制器,实现驱动电机的快速响应。该研究对柔性关节机器人的高精度位置跟踪控制提供了理论依据。
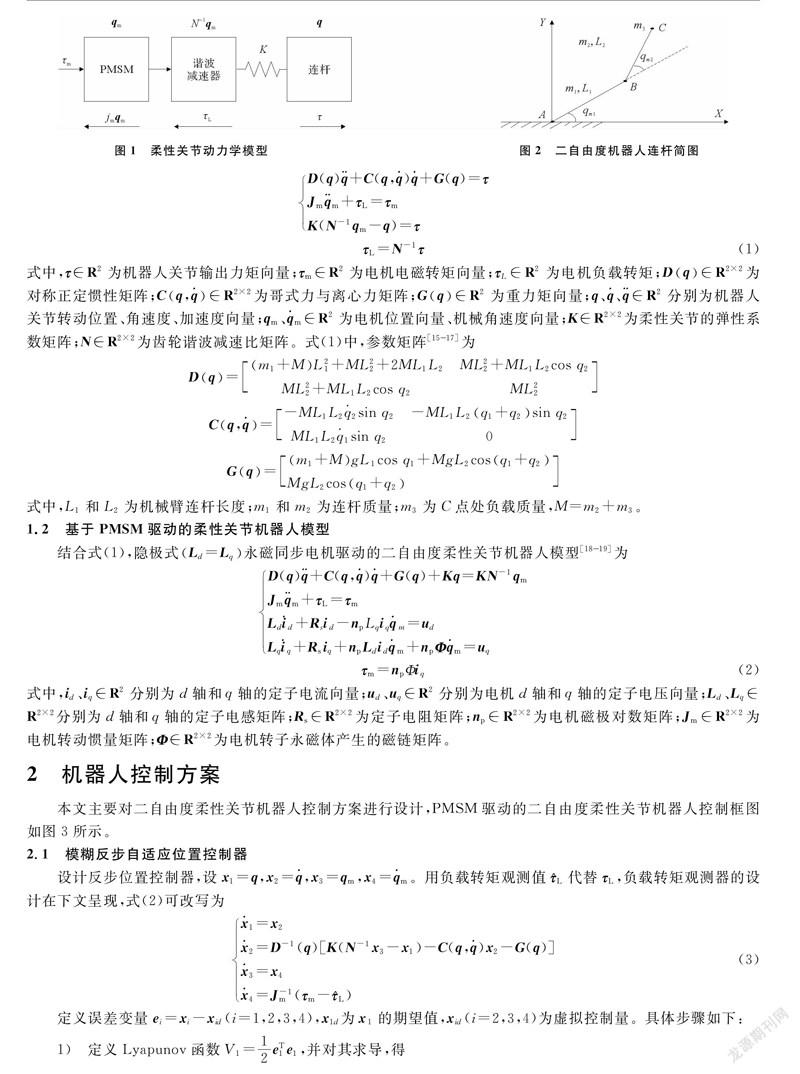
1 柔性关节机器人模型
柔性关节机器人系统由机械臂连杆、谐波减速器和驱动电机构成。机器人关节的柔性主要由谐波减速器的柔性元件产生[13]。
4 结束语
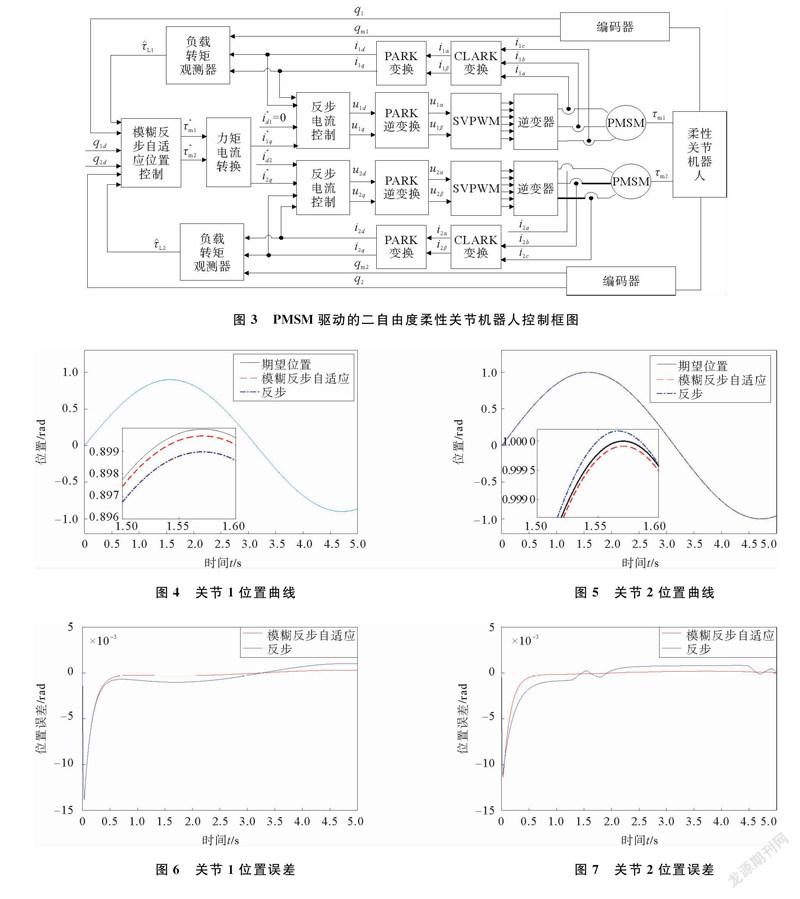
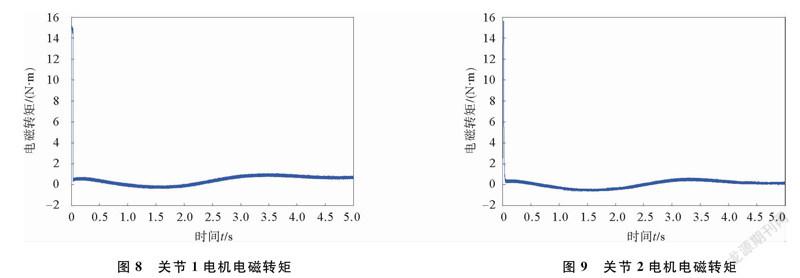
本文对柔性关节机器人位置控制进行了研究,考虑驱动系统对位置控制的影响,首先建立了PMSM驱动的二自由度柔性关节机器人模型,分别设计了机器人关节位置模糊反步自适应控制器和电机反步电流控制器,通过机器人力矩与电机q轴电流的映射关系,将两个控制器联系起来。针对反步法结构复杂的问题,利用模糊的万能逼近特性,逼近计算复杂的虚拟因子导数部分,简化了位置控制器。设计了负载转矩观测器,估计电机负载转矩,提高了控制精度,抑制了电机转矩脉动。由仿真结果可知,模糊反步自适应位置控制器,能够实现柔性关节机器人高精度位置跟踪控制,具有结构简单、位置跟踪准确、响应速度快,驱动电机的转矩波动小等优点,应用前景广阔。
参考文献:
[1] 徐恩华, 徐燕. 考虑柔性关节的机械臂自适应运动控制策略研究[J]. 计算机测量与控制, 2017, 25(7): 9093.
[2] 张奇, 刘振, 谢宗武, 等. 具有谐波减速器的柔性关节参数辨识[J]. 机器人, 2014, 36(2): 164170.
[3] 张奇, 谢宗武, 刘宏, 等. 基于无源性理论的柔性关节控制器设计[J]. 机器人, 2013, 35(1): 2331.
[4] Yin W, Sun L, Wang M, et al. Nonlinear state feedback position control for flexible joint robot with energy shaping[J]. Robot, 2017, 39(4): 458465.
[5] 谢立敏, 陈力. 柔性关节机器人基于柔性补偿的模糊鲁棒滑模控制及柔性振动主动抑制[J]. 空间科学学报, 2013, 33(6): 683689.
[6] 陳明金, 李树荣, 曹乾磊. 时滞柔性关节机械臂自适应位置/力控制[J]. 控制理论与应用, 2015, 32(2): 217223.
[7] 王雪竹, 李洪谊, 王越超, 等. 柔性关节机器人高精度自适应反步法控制[J]. 信息与控制, 2016, 45(1): 17.
[8] Herzig N, Moreau R, Redarce T, et al. Nonlinear position and stiffness backstepping controller for a two degrees of freedom pneumatic robot[J]. Control Engineering Practice, 2018, 73: 2639.
[9] Zhang Q, Li C D, Zhang J T, et al. Smooth adaptive sliding mode vibration control of a flexible parallel manipulatorwith multiple smart linkages in modal space[J]. Journal of Sound and Vibration, 2017, 411: 119.
[10] 宋崇生, 陈江, 柯翔敏. 基于干扰观测器的柔性关节机械臂滑模控制[J]. 计算机仿真, 2016, 33(10): 294299.
[11] 方一鸣, 李智, 吴洋羊, 等. 基于终端滑模负载观测器的永磁同步[J]. 电机与控制学报, 2014, 18(9): 105 111.
[12] 左月飞, 张捷, 刘闯, 等. 基于自抗扰控制的永磁同步电机位置伺服系统一体化设计[J]. 电工技术学报, 2016, 31(11): 5158.
[13] Kim M J, Chung W K. Disturbanceobserverbased PD control of flexible joint robots for asymptotic convergence[J]. IEEE Transactions on Robotics, 2015, 31(6): 19.
[14] Spong M W. Modeling and control of elastic joint robots[J]. Dynamic Systems Measurement and Control, 1987, 109(4): 310319.
[15] 张虎, 朱晓虹, 孙明山. 带有负载转矩观测器的PMSM自适应反步控制[J]. 电机与控制应用, 2016, 43(4): 1721.
[16] 范玉彬, 于海生. 二自由度機器人关节的永磁同步电机伺服控制[J]. 青岛大学学报: 工程技术版, 2016, 31(2): 5358.
[17] 布鲁诺·西西里安诺. 机器人学: 建模、规划与控制[M]. 西安: 西安交通大学出版社, 2015.
[18] 于海生, 赵克友, 郭雷, 等. 基于端口受控哈密顿方法的PMSM最大转矩/电流控制[J]. 中国电机工程学报, 2006, 26(8): 8287.
[19] Liu X, Yang C G, Chen Z G, et al. Neuroadaptive observer based control of flexible joint robot[J]. Neurocomputing, 2018, 275: 7382.
[20] Baigzadehnoe B, Rahmani Z, Khosravi A, et al. On position/force tracking control problem of cooperative robot manipulators using adaptive fuzzy backstepping approach[J]. Isa Transactions, 2017, 70: 432446.
[21] 刘恒, 向伟, 皇甫玉高, 等. Feng混沌系统参数识别及自适应模糊控制器的反步设计[J]. 模糊系统与数学, 2013, 27(3): 2329.
[22] 郭涛, 陈为胜. 不确定时滞关联大系统的全局稳定模糊容错控制[J]. 控制理论与应用, 2017, 34(5): 601608.
[23] 李建立, 于海生, 吴贺荣. 基于反步滑模和PCH的永磁同步电机协调控制[J]. 青岛大学学报: 工程技术版, 2017, 32(1): 4247.
