双接近开关代替编码器实现偏航角度测量功能的方案研究
2019-09-10赵宏伟
赵宏伟

摘要:文中针对风力发电系统,对主控系统的偏航角度测量的方案进行了探讨,文章本着节约主控系统硬件成本,优化技术方案的目的,给出了替代原来的靠编码器测量偏航角度的一种可行的替代方案。文中技术方案已经在实践中有了较好的应用,文中仅供技术参考。
关键词:风力发电;主控系统;偏航系统;编码器;偏航角度;接近开关
中图分类号:TP212
文献标识码:A
文章编号:2095-6487(2019)02-0133-02
0引言
本方案是用两个圆柱型的接近开关代替旋转编码器,并靠主控系统软件进行相应的运算来完成对风力发电机组偏航角度的跟踪测量。
本方案节约了系统的硬件成本,而且安装简易,目前已有多家厂商采用此技术,如德国MITA。
1原理
这个装置由两个距半个齿间隔(只要能产生如下波形的距离均可)的圆柱形接近开关组成,其安装在内齿侧,安装距离是当齿轮经过时能感应到该对应齿轮经过的信号,当其经过后该信号随之消失。当偏航动作后,由这两个接近开关来记录所经过偏航齿圈上的齿数,并由计算机进行数据运算来识别偏航角度。
现在解析如下:当偏航运行时,两个接近开关发出一组格雷码方式的信号,信号波形如图1所示。
由上图可以看出这两个开关有下列的四种状态,这四种状态显示了一个完整的循环周期。同时它也表示经过这样的一个周期后,偏航转过了一个相应的齿轮齿。其对应的四种状态如下:
LL(0,0)
HL(1,0)
HH(1,1)
LH(0,1)
注:接近开关检测到被测物时信号为1,没有检测到被测物信号为0。
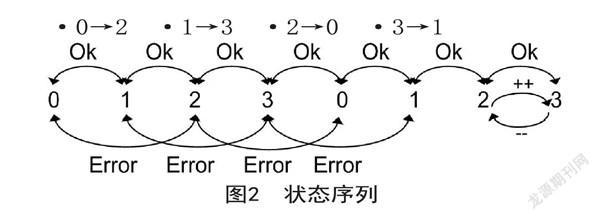
以上这四种状态是按着特定的规律发生的,在偏航過程中只能从一种状态进行到它前后相临的状态,而不能发生跳变,状态序列如图2所示。
如果产生以上的变化(ERROR)代表着偏航记数系统已经有问题出现,需要激活程序中对应的报警代码。
而偏航方向由四种状态变化的时序来确定,当由小到大变化(如1→2),表示CW方向,那么当由大到小变化(如2→1)则表示CCW方向。当由小到大变化(如1→2),表示CCW方向,那么当由大到小变化(如2→1)则表示CW方向。
当这四种状态按由大到小或者由小到大的顺次连续变化一个周期后就代表有一个对应的齿轮齿数经过。根据经过的齿轮齿数就可以判断偏航的角度和方向。
除去以上这两个接近开关外,系统还应该配置三个限位开关。从硬件上检测偏航的左右极限,和原点位置(电缆处于完全解缆状态的位置)。
2硬件说明
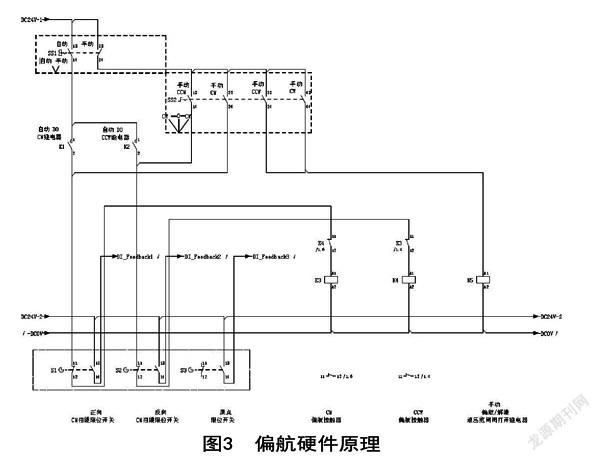
其硬件原理图纸如图3。
现分析如下:
SS1:手动偏航/自动偏航转换开关
SS2:手动正向偏航/手动回原点/手动反向偏航转换开关
K1K2:由PLC输出控制的自动偏航正向和反向继电器
K3K4:偏航电机正反向控制接触器
K5:手动偏航液压抱闸阀打开继电器
S1:正向偏航限位开关(反馈点进PLC)
S2:反向偏航限位开关(反馈点进PLC)
S30点位置检测开关(反馈点进PLC)
系统分别可以在手动偏航和自动偏航两个独立的状态下完成。手动偏航只受两个限位开关的控制。3软件说明
采用状态机的算法,每个状态迁移有两种方式,相临的增1和减1。
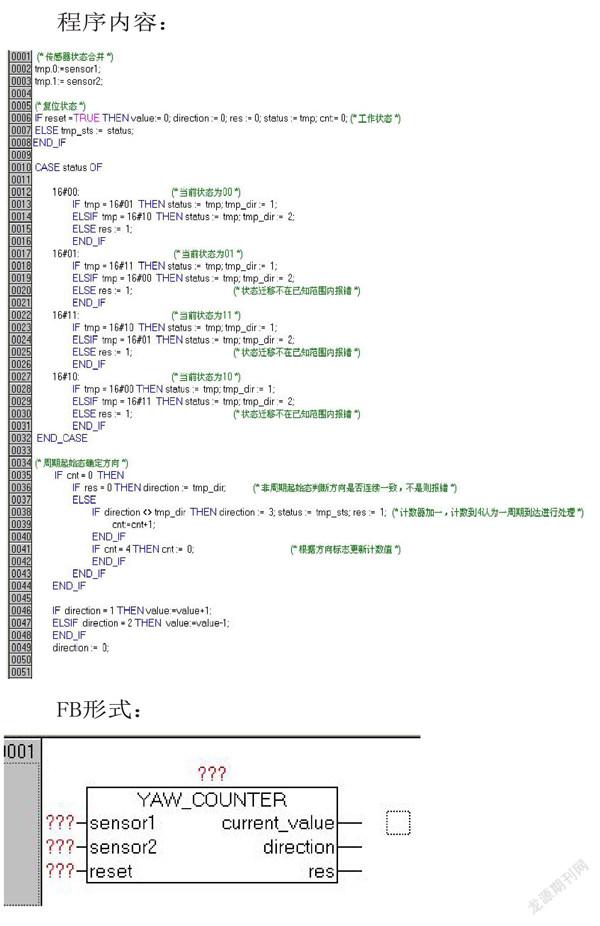
由两个接近开关实现偏航控制的程序如下(twincat10.0):
程序内容:
FB形式:
功能块
描述如下:
SENSOR1:偏航记数器接近开关I
SENSOR2:偏航记数器接近开关1
RESET:偏航记数器复位点,将各记数值清0CURRENT_VALVE:当前记数值。
DIRECTION:1表示正向偏航进行中;2示反向偏航进行中;3表示位于偏航0点。
RES:0表示偏航记数状态正常;1表示偏航记数错误。
系统如果重新上电后需要手动调整0点位置。软件RESET也需要重新触发。
对SENSORI和SONSOR2两个接近开关信号根据现场实际安装的情况需要进行相应的滤波处理,比如可以采用低高通的软件滤波器。滤波的依据根据偏航一周的齿轮数和偏航的速度进行调整。
补充说明:
现在实行的偏航角度测量形式有四种形式:
绝对值编码器,增量编码器,凸轮计数器(一个10一千欧姆的环形电阻,风机通过电阻的变化,确定风机的偏航角度并通过其电阻的变化计算偏航的速度)和文中说明的两个接近开关的方式。
在实际的应用过程中绝对值编码器的方式应该是最为准确,稳定。其次是增量编码器,凸轮计数器,最后是两个接近开关的方式。采用后两者增加了在软件的编程中要考虑的因素。特别是两个接近开关的形式,对安装位置和软件编程都提出了高的要求。
在实际应用我觉得采用两个接近开关+凸轮记数器的方式性价比较高。可以进行相互的校验,进行故障检测。
参考文献
[1]姚兴佳.风力发电机组原理与应用[M].北京:机械工业出版社,2017.
[2]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2015.
[3]凌禹.双馈风力发电系统的建模、仿真与控制[M].北京:机械工业出版社,2017.
