整车车道偏离预警系统虚拟测试方法研究
2019-09-10郑磊周祥祥郑望晓
郑磊 周祥祥 郑望晓


摘 要:现阶段,基于整车的车道偏离预警系统测试主要包括实车场地测试和实车道路测试两种。虽然实车场地测试可重复性较高,但测试场景单一,光照和天气条件不可控,实车道路测试的变量更加不可控。整车结合虚拟场景的虚拟测试手段利用测试场景的定制化特点,可以满足测试的高重复性要求,同时保证测试场景的全面性。
关键词:测试车辆;车道偏离预警系统;虚拟环境;测试
中图分类号:U463.6;U467 文献标识码:A 文章编号:1003-5168(2019)20-0022-03
Research on Virtual Test Method of Lane Departure Warning
System Based on Full Vehicle
ZHENG Lei ZHOU Xiangxiang ZHENG Wangxiao
(Test and Certification Department of Automotive Engineering Research Institute, Guangzhou Automobile Group Co.,Ltd.,Guangzhou Guangdong 511434)
Abstract: At this stage, the lane departure warning system test based on the whole vehicle mainly includes two types of real vehicle field test and real vehicle road test. Although the actual vehicle test is more repeatable, the test scenario is single, the lighting and weather conditions are uncontrollable, and the variables of the actual road test are more uncontrollable. The virtual test method of the vehicle combined with the virtual scene utilizes the customized features of the test scenario to meet the high repeatability requirements of the test and ensure the comprehensiveness of the test scenario.
Keywords: test vehicle;lane departure warning system;virtual environment;test
现阶段,车道偏离预警系统一般采用自动驾驶机器人、RTK和高精度陀螺仪等设备进行测试,实时控制测试车辆的纵向和横向速度,实时读取测试车辆与偏离侧的车道线的横向距离信息,判断测试车辆发出车道偏离预警信号时其与偏离侧的车道线的横向距离是否满足标准要求。
道路测试时,测试车辆完全由测试驾驶员控制,开展自然驾驶场景下的车道偏离预警系统测试。同时,测试车辆配备工控机、激光雷达套件、Mobileye前视摄像头套件、中距毫米波雷达套件、短距毫米波雷达套件和全景摄像头套件等路试专用设备,通过路试数据采集设备,实时读取测试车辆与左右两侧车道线的距离,实时计算测试车辆车道偏离预警体统发出报警信号时其与偏离侧车道线的距离,判断测试车辆车道偏离预警系统是否满足要求。
虚拟测试手段利用四驱转鼓系统、高清投影系统、PreScan仿真软件和移动工作站等组成的虚拟测试台架进行测试,测试用场景按照企业标准进行搭建,通过控制场景中虚拟车辆的纵向速度、横向速度、道路宽度、车道线类型、车道线颜色和光照条件等变量形成测试场景库,开展虚拟测試。
本文通过研究LDW系统的工作原理和触发条件,利用仿真软件PreScan搭建用于LDW测试的虚拟仿真环境模型,通过标定前视摄像头的覆盖区域验证了该虚拟测试台架的可行性。由于测试车辆在四驱转鼓上无法触发方向盘转角信号和横摆角速度信号,本文只针对直线道路的LDW系统进行虚拟测试研究。
1 LDW系统工作原理
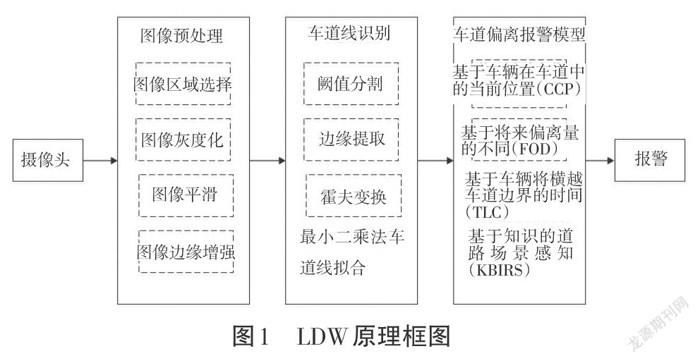
车道偏离预警系统(LDW)主要由前视摄像头、控制器、方向盘转角传感器和横摆角速度传感器等组成。当车道偏离预警系统开启并激活时,前视摄像头实时采集前方路面车道线信息,实时计算车辆与左右两侧车道线的横向距离。当检测到汽车有偏离动作发生,而且无偏离侧转向灯信号、方向盘急转信号和紧急制动信号等信号激活时,控制器通过声音、图标和震动等方式提示驾驶员正在发生偏离,以便驾驶员及时修正车辆的行驶方向,确保安全驾驶,系统原理如图1所示[1-7]。
2 整体方案设计
该方案利用现有的四驱转鼓实验室搭建测试台架,为确保覆盖尽可能多的车型的FOV角度,幕布选用的是5.08m的大型幕布。在实验室空间允许的情况下,幕布布置在距离前轴滚筒中心前方3.5m的地方,使用升降器进行高度调节,如图2所示。
投影仪选用的是工业级的高清投影仪,可投影画面尺寸为2.54~7.62m,布置在距离幕布6.5m的位置,幕布横向中心线、四驱转鼓纵向中心线和投影仪灯泡中心点确保在同一平面内,使用升降器进行高度调节。
测试时将测试车辆移至四驱转鼓上,调节测试车辆的横向位置,使得测试车辆前视单目摄像头落在幕布横向中心线、转鼓纵向中心线和投影仪灯泡中心点所在的面上,然后将测试车辆固定好。
3 虚拟场景搭建
虚拟场景的搭建是指针对车道偏离预警系统的功能特点,搭建模拟的3D交通环境,主要包括车道线设计和行驶工况设计,然后通过不同车道线和行驶工况的排列组合,形成测试矩阵,开展车道偏离预警的整车级测试[7]。
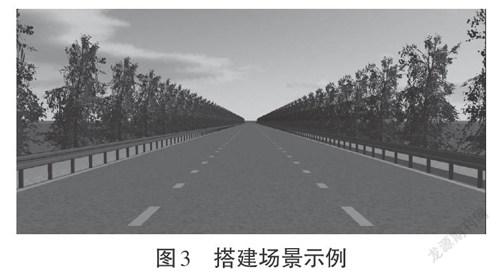
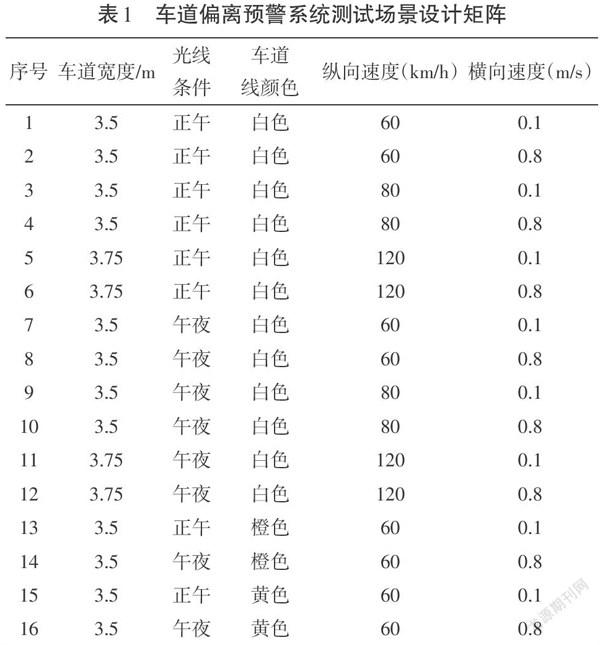
虚拟场景搭建时,首先需要获取测试车辆前视单目摄像头的安装高度和FOV参数,虚拟场景中车辆模型配置的前视单目摄像头参数按照测试车辆摄像头进行配置。搭建场景示例如图3所示,车道偏离预警系统测试场景设计矩阵如表1所示。
4 高清投影系统布置
幕布可投影区域的中心高度与测试车辆单目摄像头中心点的高度保持一致。一是根据测试车辆前视单目摄像头的FOV参数,计算出摄像头在幕布纵向位置处的视野范围;二是通过调节投影仪投影的画面尺寸,与摄像头在此处的视野范围尺寸保持一致;三是通过调节投影仪的高度,确保投影画面中心点与幕布可投影区域的中心点重合,保证投影画面输入给测试车辆前视单目摄像头的场景画面与虚拟场景中摄像头模型看到的画面一致。
5 测试结果分析
测试开始时,测试车辆和转鼓速度的配置和场景中车辆模型的车速保持一致。当测试车辆车道偏离预警系统激活时,开始运行测试场景模型,将3D-VisViewer画面通过投影仪投射到幕布上,运行场景库的场景模型,记录测试过程中测试车辆仪表端车道偏离预警系统的状态值。
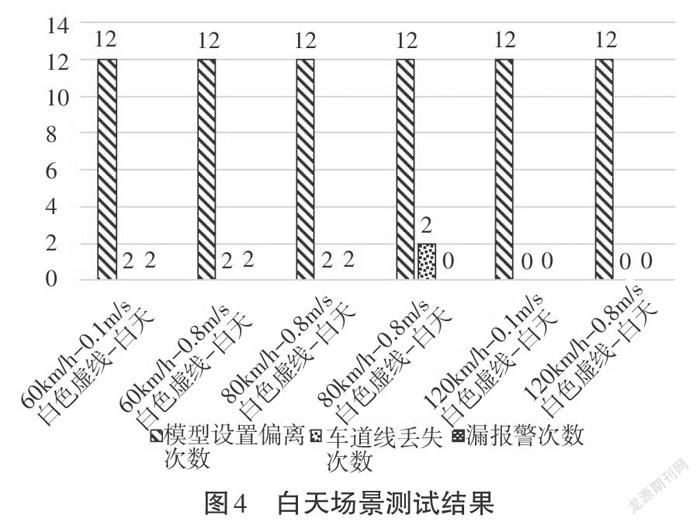
针对白天正午时分光线下的白色单虚线开展一轮测试,如图4所示,测试结果显示,设置的72次偏离动作中测试车辆车道偏离预警系统均正常触发,无漏报发生,6个场景共72次偏离动作中只有纵向80km/h和横向0.8m/s的场景下出现两次瞬时车道线丢失情况,其他均正常识别车道线,无丢失。
与白天相比,夜间场景对整车车道偏离预警系统的要求较高,示例如图5所示。针对午夜时分光线下的白色单虚线开展一轮测试,如图6所示,测试结果显示,设置的72次偏离动作中测试车辆车道偏离预警系统均正常触发,无漏报发生,车道线识别均正常,无丢失。
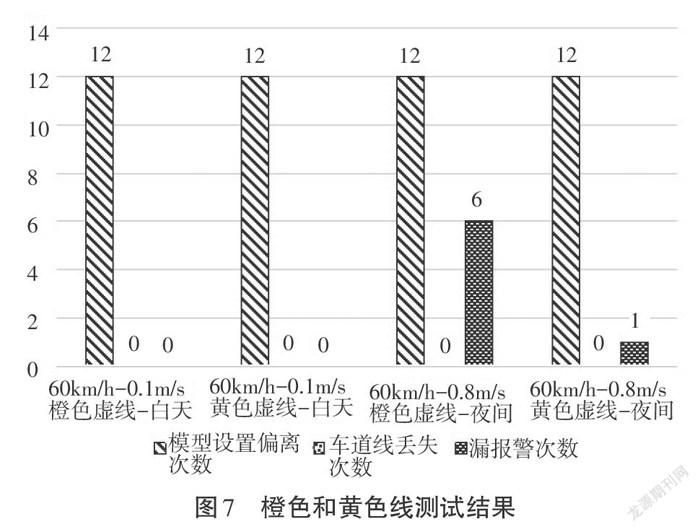
除了测试生活中常见的白色线,该方案针对黄色线和橙色线也开展了测试,分别利用60km/h纵向和0.1m/s横向以及60km/h纵向与0.8m/s横向两种场景,设置了48次偏离动作,测试结果如图7所示。其中,当偏离速度设置为0.1m/s时,测试车辆车道偏离预警系统均正常触发报警,无漏报和无车道线丢失情况发生;当偏离速度设置为0.8m/s时,橙色线虽无车道线识别丢失情况发生,但出现6次漏报警,漏报警占比50%,黄色线发生一次漏报警现象。
综上,基于整车的车道偏离预警系统在环虚拟测试方法可行。
參考文献:
[1]白云,贾晋,李彪,等.智能汽车LDWS辐射抗扰度的测试方法[J].安全与电磁兼容,2017(5):35-39.
[2]马小龙.基于机器视觉的复杂光照条件下的车道检测及识别[D].成都:电子科技大学,2013.
[3]谢一峰.基于单目视觉的车道线检测与智能车导航[D].上海:上海交通大学,2013.
[4]谢广飞,李晓明,武潇.无人驾驶汽车视觉导航中车道线检测的研究[J].火力与指挥控制,2015(6):152-158.
[5]毛玉星,苗伽略,汪泉霖,等.汽车偏离车道线的图像分析与视觉计算方法[J].计算机工程与应用,2013(22):167-172.
[6]徐建勋,游国平,丁良旭.客车车道偏离报警系统性能测试与评价[J].客车技术与研究,2017(3):46-49.
[7]刘全周,王述勇,李占旗,等.基于虚拟场景的车道偏离预警摄像头在环测试方法研究[J].新型工业化,2019(3):107-111.
