基于深度学习的航拍图像目标识别
2019-09-09景啸
景啸

摘要:本文讨论了使用航拍图像的自动目标识别的问题。在这项工作中,提出并应用深度学习架构,以便从航拍图像中识别车辆。主要在这项工作中提出了基于深度卷积神经网络(Deep Convolutional Neural Network,DCNN)结构的深度学习算法。为7验证本文的方法,给出了一些实验结果并进行了比较。得到的结果表明,所提出的深度学习方法达到了93%的识别精度,较一般深度学习方法有明显提升。
关键词:目标识别 深度学习 深度卷积神经网络 航拍图像
引言
随着航拍技术和图像处理技术的日益成熟,在军事和民用领域运用越来越广泛,如追踪军事目标、地形勘探、快递运输等。航拍中由于干扰目标众多,背景复杂,而且随着目标和拍摄载具的移动,追踪目标特征难以描述,因此传统的方法难以追踪目标。
1 深度学习
深度神经网络(Deep Neural Network,DNN)也称深度学习,是基于数据学习的眾多机器学习方法的一类。而针对图像处理有多种深度学习的处理方法,如图像分割、或边缘查找等。而深度卷积神经网络(Deep Convolutional Neural Network,DCNN)是一种深度学习算法并已成功应用于图像处理中。因为DCNN可以获得比标准神经网络训练时间更少的更好结果。首先,DCNN在卷积层中有一大组滤波器内核,可以从原始数据中捕获代表性的信息和模式。堆叠这些卷积层可以进一步融合信息并构建复杂的图案;其次,DCNN是一个独立连接的网络,每个过滤器共享相同的权重。这种结构可以减少训练时间和模型的复杂性。此外,DCNN的池化层进一步减少了输人数据的变化以及训练时间,并且提高了提取模式的鲁棒性。因此本文采用DCNN从航拍图像中提取特征,以实现识别任务。
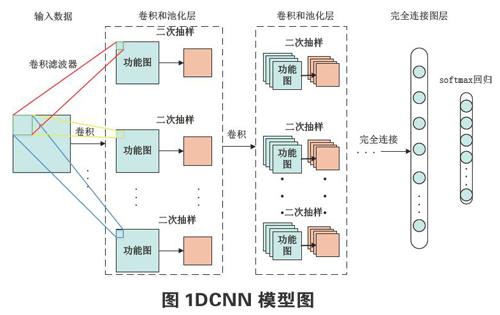
典型的DCNN的前几层通常由两种类型的卷积层组成,其次是池化层最后一层是完全连接层。接下来,本文将更详细地描述这三种层。
(1)卷积层由许多具有加权参数的二维(2D)滤波器组成。滤波器用输人数据卷积并获得输出,称为特征映射。每个滤波器共享输入的所有补丁的相同加权参数数据来减少训练时间和模型的复杂性,这与传统的具有不同加权参数的神经网络在输入数据的不同路径上是不同的。
(2)池化层是一个子采样层,它通过降低采样降低卷积层输出的特征向量,同时改善结果,不易出现过拟合,提高了特征学习的鲁棒性。池化层通常遵循具有最大汇集方法的卷积层,并且其仅输出特征映射的每个子采样片的最大值以对来自先前卷积层的特征映射进行二次采样。
(3)全连接层是DCNN模型的最后一层。它遵循卷积层和池化层的几种组合,并从上一层中对更高级别的信息进行分类。一个全连接层类似于传统的多层神经网络的隐层、分类层,通常使用softmax回归,假设任务是K-lalole问题'该softmax回归的输出可由下式表达
2实验及结果
本文中使用了包含车辆的数据集。航拍图像的示例如图2所示。每个图像的大小约为50乘35.不同的目标图像可能具有略微不同的大小。图像已经以0到360度的方向居中。由于缺乏分辨率和背景和航拍数据处理产生的噪声,航拍图像看起来像模糊,失焦。该数据集由1434个图像组成,分解为844个训练图像和590个测试基础图像。图2给出了不同目标的航拍图作为数据集样本。
如果所有图像具有相同的尺寸50x35且目标位于图像的中心,建议采用32x32大小的补丁,其中目标位于补丁的中心。在此步骤之后,从图像中减去平均值并将其除以图像的标准偏差,即已经标准化数据。
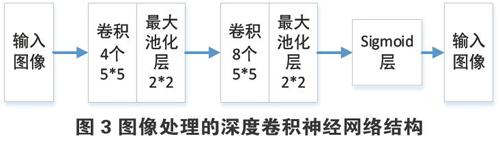
本研究中提出的深度卷积神经网络前两个卷积层之后是最大池化层,池化大小为2x2步长为2个像素在卷积层中不使用空间零填充,并且卷积步幅固定为1个像素。在第一个卷积层中,通过4个大小为5×5的卷积滤波器对32x32输入图像进行滤波,得到4个大小为28x28的特征图。在第一个池化层之后,它们的大小变为14 x14。第一个池化层的输出被发送到第二个卷积层,其卷积滤波器大小为5X5,导致8个大小为10 x10的特征映射。在第二个池化层之后,它们的大小变为5X5大小为5×5的8个特征图。最后的每个图像由25个像素组成,总共我们有25×8-200个像素,这些像素形成我们要在sigmoid层中分类的矢量。
为了验证所提方法的效率,我们使用了航拍数据库。比较两种方法(CNN和DCNN),DCNN识别精度约为93%,CNN识别进度约为84%。因此,DCNN在当前环境下识别能力优于CNN。
3 结论
特征提取在目标自动识别中起着关键作用。由于深度卷积神经网络在计算机视觉和语音识别中取得了巨大成功,本文将这种方法借鉴航拍图像的目标识别中,通过构建DCNN来自动提取航拍图像中的特征,从而解决了特征提取的问题,目标识别精度远高于一般深度学习方法。
参考文献
[l]Prokaj J,Medioni G.Persistent Tracking for Wide Area AerialSurveillanceECl// IEEE Conference on Computer Vision&PatternRecognition. IEEE Computer Society. 2014.
[2]全小敏.航拍视频运动目标检测与跟踪方法研究[D].
[3]朱海港,基于深度学习的高清航拍图像目标检测[D].2015.
[4]Lecun,Y.;Bengio,Y.; Hinton,G.Deep learning[J]. Nature 2015.521, 436 444
[5]刘一宵,牛珊珊,栗春晓.图像处理方法综述与案例分析[J],科学家,2017(5):159.
